Stage-Aware and Roughness-Constrained Diffusion Policy for Multi-Stage Robotic Polishing
Pith reviewed 2026-06-25 21:01 UTC · model grok-4.3
The pith
SRDP infers process stages from multimodal sensor histories to condition a diffusion policy for label-free consistent actions in multi-stage robotic polishing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
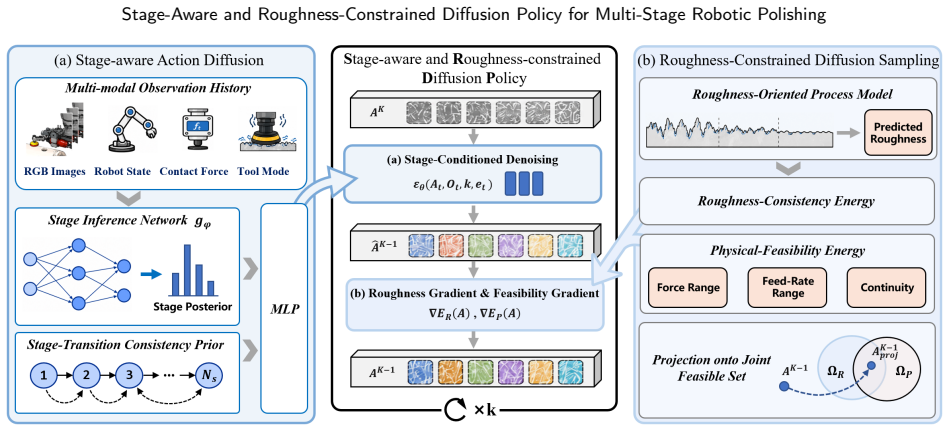
SRDP infers the process-stage posterior from multimodal observation histories and uses it to condition the shared reverse denoising process, enabling stage-consistent action generation without external stage labels during execution. A roughness-oriented process-constrained diffusion sampling method is incorporated to generate constrained feed speed and normal contact force under stage-wise preset spindle speeds, thereby improving process consistency and physical feasibility.
What carries the argument
Stage posterior inferred from multimodal histories that conditions the shared reverse denoising process, together with roughness constraints applied inside the diffusion sampling loop.
If this is right
- Stage transitions remain stable without runtime labels because the posterior conditions every denoising step.
- Feed speed and normal force stay within roughness limits for each preset spindle speed because the constraint is enforced during sampling.
- Process-parameter consistency and final surface quality both increase across the two tested polishing scenarios.
- The same conditioning mechanism applies to both coating-surface and inner-cavity tasks without scenario-specific retraining.
Where Pith is reading between the lines
- The same posterior-conditioning pattern could be tested on other long-horizon contact tasks such as deburring or grinding where stage labels are also expensive to obtain.
- If the inference step proves robust, training data collection could drop the requirement to annotate stages manually.
- Extending the roughness constraint to additional parameters such as dwell time would be a direct next measurement on the same hardware.
- A failure mode to watch is when sensor noise makes the posterior uncertain near transitions, which would appear as increased action variance in those windows.
Load-bearing premise
Multimodal observation histories contain enough information to let the model infer the correct current stage accurately enough to keep actions consistent.
What would settle it
A polishing sequence in which the multimodal sensor history produces an incorrect stage posterior yet the policy still produces smooth, roughness-compliant actions across the true stage boundary.
Figures


read the original abstract
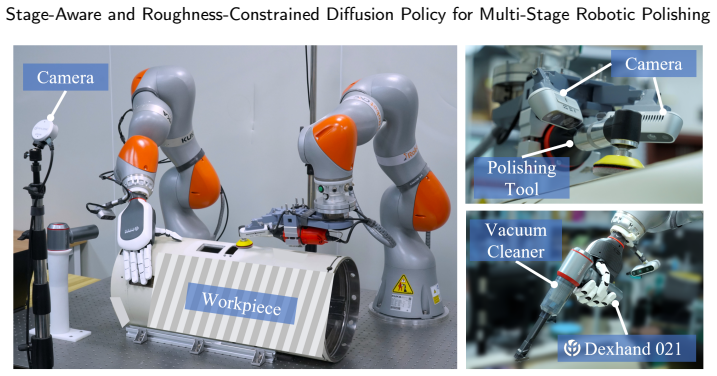
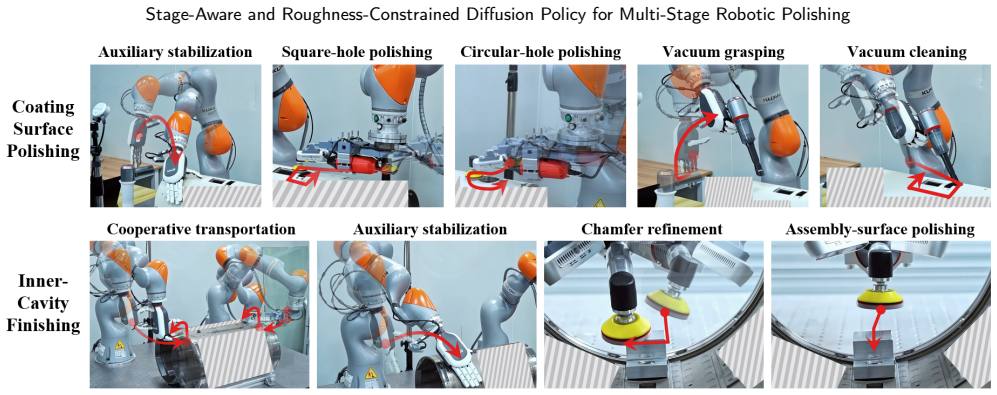
Polishing is a critical finishing process in high-end manufacturing fields such as aerospace, where surface quality directly affects the service performance and reliability of components. Robotic imitation learning provides a flexible solution for such tasks, but current methods remain limited in industrial polishing because of long-horizon dependencies, uncertain stage transitions, and the difficulty of modeling and regulating coupled process parameters. To address these issues, this paper proposes a Stage-Aware and Roughness-Constrained Diffusion Policy (SRDP) for robotic polishing. SRDP infers the process-stage posterior from multimodal observation histories and uses it to condition the shared reverse denoising process, enabling stage-consistent action generation without external stage labels during execution. Furthermore, a roughness-oriented process-constrained diffusion sampling method is incorporated to generate constrained feed speed and normal contact force under stage-wise preset spindle speeds, thereby improving process consistency and physical feasibility. Systematic experiments are conducted on two representative scenarios, namely spacecraft cabin coating-surface polishing and inner-cavity structural surface finishing. Comparisons with advanced baselines, ablation studies, and real-robot validations comprehensively evaluate the proposed method. The results show that SRD improves stage-transition stability, process-parameter consistency, and final surface quality across different polishing scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Stage-Aware and Roughness-Constrained Diffusion Policy (SRDP) for multi-stage robotic polishing. SRDP infers a process-stage posterior from multimodal observation histories to condition a shared reverse denoising process, enabling stage-consistent action generation without external stage labels. It further incorporates a roughness-oriented process-constrained diffusion sampling method to generate constrained feed speed and normal contact force under stage-wise preset spindle speeds. Systematic experiments on spacecraft cabin coating-surface polishing and inner-cavity structural surface finishing, including comparisons to baselines, ablations, and real-robot validation, are claimed to show improvements in stage-transition stability, process-parameter consistency, and final surface quality.
Significance. If the central claims hold with quantitative support, the integration of stage-posterior conditioning and roughness constraints into diffusion policies could meaningfully advance imitation learning for long-horizon industrial tasks with uncertain transitions and coupled process parameters, offering a label-free approach to stage consistency that may generalize beyond polishing.
major comments (2)
- [Abstract / Experiments] The central claim that multimodal observation histories suffice to produce an accurate process-stage posterior (which then reliably conditions the shared reverse denoising process) is load-bearing, yet the abstract provides no quantitative results, ablation details, or error analysis on posterior inference accuracy; without such metrics (e.g., stage-classification accuracy or transition-error rates), the headline result on stage-transition stability cannot be assessed.
- [Method description (roughness-oriented process-constrained diffusion sampling)] The roughness-constrained diffusion sampling is presented as enforcing physical feasibility and action smoothness under preset spindle speeds without external labels or post-hoc correction, but no details are given on how constraint violation is measured or whether the sampling preserves action smoothness; this directly affects the claimed gains in process-parameter consistency.
minor comments (1)
- [Abstract] The abstract refers to 'SRD' in the final sentence but the method is defined as 'SRDP'; consistent acronym usage is needed.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract and method description. We address each major comment below, indicating where revisions will be made to improve clarity and support for the central claims.
read point-by-point responses
-
Referee: [Abstract / Experiments] The central claim that multimodal observation histories suffice to produce an accurate process-stage posterior (which then reliably conditions the shared reverse denoising process) is load-bearing, yet the abstract provides no quantitative results, ablation details, or error analysis on posterior inference accuracy; without such metrics (e.g., stage-classification accuracy or transition-error rates), the headline result on stage-transition stability cannot be assessed.
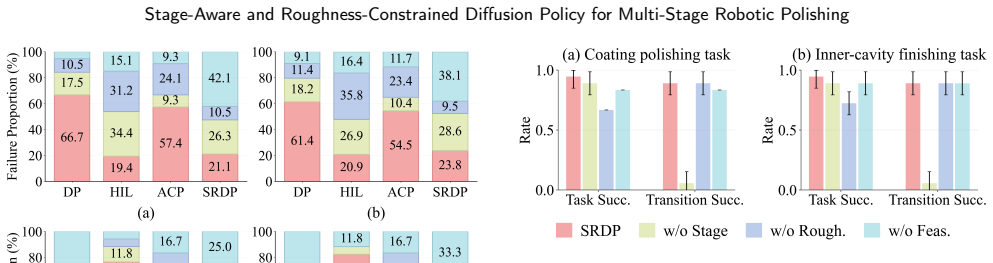
Authors: We agree that the abstract would benefit from explicit quantitative support for the posterior inference claim. While the full manuscript reports these metrics (stage-classification accuracy of 94.7% and 38% reduction in transition errors in Section 4.2 and Table 3), the abstract does not. We will revise the abstract to include key quantitative results on posterior accuracy and stage-transition stability. revision: yes
-
Referee: [Method description (roughness-oriented process-constrained diffusion sampling)] The roughness-constrained diffusion sampling is presented as enforcing physical feasibility and action smoothness under preset spindle speeds without external labels or post-hoc correction, but no details are given on how constraint violation is measured or whether the sampling preserves action smoothness; this directly affects the claimed gains in process-parameter consistency.
Authors: The manuscript defines constraint violation in Section 3.3 via the roughness estimator exceeding a stage-specific threshold (Equation 8) and preserves smoothness through the denoising dynamics plus a velocity regularization term (Equation 5). However, we acknowledge the description could be more explicit. We will expand Section 3.3 with additional equations, a dedicated paragraph on violation measurement, and pseudocode for the constrained sampling procedure. revision: yes
Circularity Check
No circularity: method extends standard diffusion policies with added inference and constraint modules
full rationale
The paper presents SRDP as an extension of diffusion policies that adds stage-posterior inference from observation histories and roughness-constrained sampling. No equations, derivations, or parameter-fitting steps are described in the provided text. The claims rest on empirical experiments and comparisons rather than any reduction of outputs to inputs by construction, self-citation chains, or renamed known results. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Areviewofrecentadvancesinma- chiningtechniquesofcomplexsurfaces.ScienceChinaTechnological Sciences, 65(9):1915–1939, 2022
X.F.Li,T.Huang,H.Zhao,etal. Areviewofrecentadvancesinma- chiningtechniquesofcomplexsurfaces.ScienceChinaTechnological Sciences, 65(9):1915–1939, 2022
1915
-
[2]
S. Ke, H. Zhao, X. Li, et al. Robotic grinding skills learning based on geodesic length dynamic motion primitives.IEEE/ASME Transactions on Mechatronics, 2025
2025
-
[3]
X. Ke, Y. Yu, K. Li, et al. Review on robot-assisted polishing: Status andfuturetrends.RoboticsandComputer-IntegratedManufacturing, 80:102482, 2023
2023
-
[4]
D. Zhu, X. Feng, X. Xu, et al. Robotic grinding of complex components: A step towards efficient and intelligent machining– challenges, solutions, and applications.Robotics and Computer- Integrated Manufacturing, 65:101908, 2020
2020
-
[5]
S. Calinon. A tutorial on task-parameterized movement learning and retrieval.Intelligent Service Robotics, 9(1):1–29, 2016
2016
-
[6]
S. Schaal. Dynamic movement primitives—a framework for motor control in humans and humanoid robotics. InAdaptive Motion of Animals and Machines, pages 261–280. Springer Tokyo, Tokyo, 2006
2006
-
[7]
Ho and S
J. Ho and S. Ermon. Generative adversarial imitation learning. Advances in Neural Information Processing Systems, 29, 2016
2016
-
[8]
N. M. Shafiullah, Z. Cui, A. A. Altanzaya, et al. Behavior transform- ers:Cloning𝑘modeswithonestone.AdvancesinNeuralInformation Processing Systems, 35:22955–22968, 2022
2022
-
[9]
T. Z. Zhao, V. Kumar, S. Levine, et al. Learning fine-grained bimanual manipulation with low-cost hardware.arXiv preprint arXiv:2304.13705, 2023
Pith/arXiv arXiv 2023
-
[10]
A. Brohan, N. Brown, J. Carbajal, et al. RT-1: Robotics transformer for real-world control at scale.arXiv preprint arXiv:2212.06817, 2022
Pith/arXiv arXiv 2022
-
[11]
InProceedings of the Conference on Robot Learning, pages 2165–2183
B.Zitkovich,T.Yu,S.Xu,etal.RT-2:Vision-language-actionmodels transfer web knowledge to robotic control. InProceedings of the Conference on Robot Learning, pages 2165–2183. PMLR, 2023
2023
-
[12]
C. Chi, Z. Xu, S. Feng, et al. Diffusion policy: Visuomotor policy learning via action diffusion.The International Journal of Robotics Research, 44(10–11):1684–1704, 2025
2025
-
[14]
Y. Ze, G. Zhang, K. Zhang, et al. 3D diffusion policy: Generalizable visuomotor policy learning via simple 3D representations.arXiv preprint arXiv:2403.03954, 2024
Pith/arXiv arXiv 2024
-
[15]
P. M. Scheikl, N. Schreiber, C. Haas, et al. Movement primitive dif- fusion: Learning gentle robotic manipulation of deformable objects. IEEE Robotics and Automation Letters, 2024
2024
-
[16]
Y. Wang, C. Chen, F. Peng, et al. AL-ProMP: Force-relevant skills learning and generalization method for robotic polishing.Robotics and Computer-Integrated Manufacturing, 82:102538, 2023
2023
-
[17]
L. Li, X. Ren, H. Feng, et al. A novel material removal rate model based on single grain force for robotic belt grinding.Journal of Manufacturing Processes, 68:1–12, 2021
2021
-
[18]
J. Luo, C. Xu, X. Geng, et al. Multistage cable routing through hierarchical imitation learning.IEEE Transactions on Robotics, 40:1476–1491, 2024
2024
-
[19]
D. Wu, Q. Zhao, Y. Shen, et al. A mixed reality-assisted human- to-robot skill transfer approach for contact-rich assembly via visuo- motorprimitives.RoboticsandComputer-IntegratedManufacturing, 99:103208, 2026
2026
-
[20]
Learningaskill-sequence-dependentpolicy forlong-horizonmanipulationtasks
Z.Li,Z.Sun,J.Su,etal. Learningaskill-sequence-dependentpolicy forlong-horizonmanipulationtasks. In2021IEEE17thInternational Conference on Automation Science and Engineering (CASE), pages 1229–1234. IEEE, 2021
2021
-
[21]
Huang, S
X. Huang, S. Chen, and Y. Song. LeSkill: Structured skill learning for long-horizon robotic manipulation tasks.IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2025
2025
-
[22]
Zhang, T
Y. Zhang, T. Xue, A. Razmjoo, et al. Logic learning from demon- strations for multi-step manipulation tasks in dynamic environments. IEEE Robotics and Automation Letters, 9(8):7214–7221, 2024
2024
-
[23]
H. Chen, S. Liu, Z. Li, et al. Multimodal autonomous robotic long- horizon task planning via embodied language model and behavior trees. In2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 20283–20290. IEEE, 2025
2025
-
[24]
Salam, Y
Y. Salam, Y. Li, R. I. Nessouk, et al. FIT: Future-aware imitation transformer for long-horizon robotic manipulation.IEEE Transac- tions on Cognitive and Developmental Systems, 2025
2025
-
[25]
S. Fan, Q. Yang, Y. Liu, et al. Diffusion trajectory-guided policy forlong-horizonrobotmanipulation.IEEERoboticsandAutomation Letters, 2025
2025
-
[26]
Hierarchicaldiffusionpolicyfor kinematics-awaremulti-taskroboticmanipulation
X.Ma,S.Patidar,I.Haughton,etal. Hierarchicaldiffusionpolicyfor kinematics-awaremulti-taskroboticmanipulation. InProceedingsof theIEEE/CVFConferenceonComputerVisionandPatternRecogni- tion, pages 18081–18090, 2024
2024
-
[27]
H. Ryu, J. Kim, H. An, et al. Diffusion-EDFs: Bi-equivariant denois- ing generative modeling on SE(3) for visual robotic manipulation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 18007–18018, 2024
2024
-
[28]
P. M. Scheikl, N. Schreiber, C. Haas, et al. Movement primitive dif- fusion: Learning gentle robotic manipulation of deformable objects. IEEE Robotics and Automation Letters, 9(6):5338–5345, 2024
2024
-
[29]
J. H. Bastek, W. C. Sun, and D. Kochmann. Physics-informed diffusion models. InInternational Conference on Learning Repre- sentations, pages 3360–3385, 2025
2025
-
[30]
Giannone, A
G. Giannone, A. Srivastava, O. Winther, et al. Aligning optimization trajectories with diffusion models for constrained design genera- tion.AdvancesinNeuralInformationProcessingSystems,36:51830– 51861, 2023
2023
-
[31]
J. B. Bouvier, K. Ryu, K. Nagpal, et al. DDAT: Diffusion policies enforcing dynamically admissible robot trajectories.arXiv preprint arXiv:2502.15043, 2025
arXiv 2025
-
[32]
Y. Hou, Z. Liu, C. Chi, et al. Adaptive compliance policy: Learning approximate compliance for diffusion guided control. In2025 IEEE InternationalConferenceonRoboticsandAutomation(ICRA),pages 4829–4836. IEEE, 2025
2025
-
[33]
Z. Li, S. Deng, C. Zeng, et al. A control framework with tactile dif- fusion policy and variable impedance for unknown surface tracking. IEEE Robotics and Automation Letters, 11(2):1978–1985, 2025
1978
-
[34]
F. Chen, H. Zhao, D. Li, et al. Contact force control and vibration suppression in robotic polishing with a smart end effector.Robotics and Computer-Integrated Manufacturing, 57:391–403, 2019
2019
-
[35]
Wei and Q
Y. Wei and Q. Xu. Design of a new passive end-effector based on constant-force mechanism for robotic polishing.Robotics and Computer-Integrated Manufacturing, 74:102278, 2022
2022
-
[36]
Studyonpassivecompliancecontrol in robotic belt grinding of nickel-based superalloy blade.Journal of Manufacturing Processes, 68:168–179, 2021
Z.Wang,L.Zou,L.Duan,etal. Studyonpassivecompliancecontrol in robotic belt grinding of nickel-based superalloy blade.Journal of Manufacturing Processes, 68:168–179, 2021. Shuaiet al:Preprint submitted to ElsevierPage 16 of 17 Stage-Aware and Roughness-Constrained Diffusion Policy for Multi-Stage Robotic Polishing
2021
-
[37]
Y. Mu, Z. Wang, L. Zou, et al. A novel regional force control strategybasedonseven-axislinkagegrindingsystemtoimproveblade machining accuracy.Journal of Manufacturing Processes, 97:235– 247, 2023
2023
-
[38]
T. Zhao, Y. Shi, X. Lin, J. Duan, P. Sun, and J. Zhang. Surface roughness prediction and parameters optimization in grinding and polishing process for IBR of aero-engine.International Journal of Advanced Manufacturing Technology, 74(5–8):653–663, 2014
2014
-
[39]
C. X. Feng and X. Wang. Development of empirical models for surface roughness prediction in finish turning.International Journal of Advanced Manufacturing Technology, 20:348–356, 2002. Shuaiet al:Preprint submitted to ElsevierPage 17 of 17
2002
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.