A Sensorised Lattice Footplate for a Semi-Active Prosthetic Foot
Pith reviewed 2026-06-25 20:25 UTC · model grok-4.3
The pith
Magnetic plantar sensing can be embedded inside the load-bearing lattice of a semi-active prosthetic foot to estimate forces and control damping.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper demonstrates that a sensorised lattice footplate allows magnetic plantar sensing to be integrated into the load-bearing element of a low-cost semi-active prosthetic foot. Combined with a servo-controlled hydraulic damper and a reduced-order ankle model, the system supports force estimation and damping adjustment. Tests show the embedded sensors match reference forces during cyclic loading and distinguish forefoot versus rearfoot loading in static postures. A feedforward schedule based on the sensing approximates dorsiflexion in early-to-mid stance, highlighting the limit of dissipative-only mechanisms for push-off.
What carries the argument
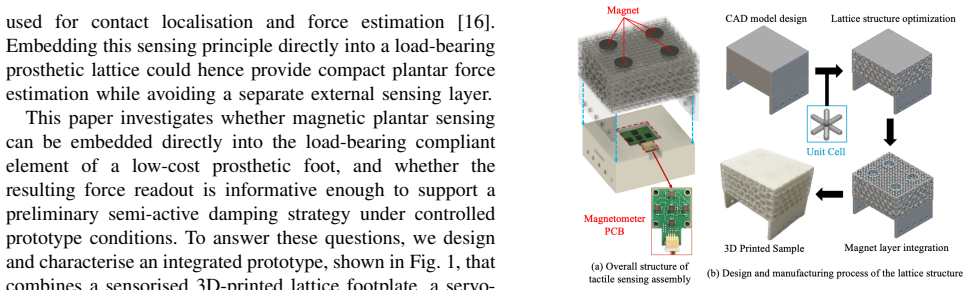
The sensorised 3D-printed lattice footplate embedding magnetic sensing for plantar force estimation within the compliant structure.
If this is right
- The lattice stiffness is tunable through its design parameters.
- Embedded sensors can estimate plantar force without an external insole.
- Forefoot and rearfoot loading can be separated based on sensor readings in different stances.
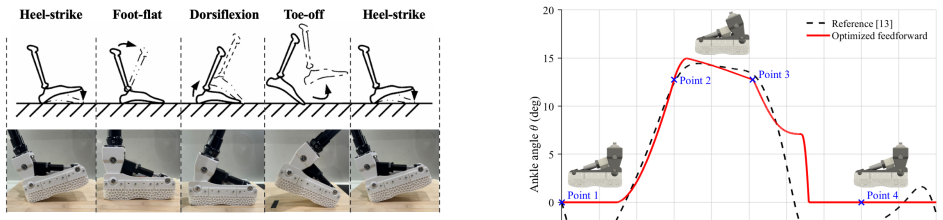
- Damping adjustment can follow a schedule to match reference ankle dorsiflexion trends in early stance.
- Purely dissipative damping cannot produce active push-off.
Where Pith is reading between the lines
- This integration might simplify prosthetic manufacturing by eliminating separate sensor components.
- Future designs could use the same lattice for both compliance and sensing in other wearable devices.
- Dynamic gait testing would be needed to confirm performance beyond static and cyclic lab conditions.
Load-bearing premise
The controlled compression, cyclic loading, and static-posture trials under body-weight loading provide a sufficient preliminary check that the embedded sensing pipeline will function during dynamic gait in actual use.
What would settle it
Observing whether the embedded sensors maintain accurate force tracking and allow effective damping control during actual walking trials on a treadmill or overground, compared to reference measurements from force plates.
Figures



read the original abstract
This paper investigates whether magnetic plantar sensing can be embedded directly inside the load-bearing compliant element of a low-cost semi-active prosthetic foot. We present a prototype integrating a sensorised 3D-printed lattice footplate, a servo-adjustable hydraulic damper, and a reduced-order ankle model. The damper is experimentally characterised to relate adjustment angle to damping coefficient. Controlled compression tests show tunable lattice stiffness, while cyclic normal loading shows that the embedded sensor tracks the testing-machine reference force, supporting plantar-force estimation without an external insole layer. Static-posture trials under approximately body-weight loading show that forefoot and rearfoot loading distributions are separable across four prescribed stance configurations, providing a preliminary check of the sensing pipeline. A feedforward damping schedule approximates the dorsiflexion trend of a reference ankle trajectory through early-to-mid stance, while exposing the expected limitation that a purely dissipative mechanism cannot generate active push-off. Together, these results demonstrate that sensing can be embedded inside the load-bearing compliant element of a prosthetic foot and used to drive semi-active damping.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript describes the design and preliminary experimental evaluation of a semi-active prosthetic foot featuring an embedded magnetic sensor in a 3D-printed lattice footplate, paired with a servo-controlled hydraulic damper. Key experiments include damper characterization relating angle to damping coefficient, lattice compression tests showing tunable stiffness, cyclic normal loading where the sensor tracks reference force, static-posture trials under body-weight loading demonstrating separable forefoot/rearfoot distributions across four configurations, and a feedforward damping schedule approximating early-stance dorsiflexion. The central claim is that these results demonstrate sensing can be embedded inside the load-bearing compliant element and used to drive semi-active damping.
Significance. If validated, the integration of sensing directly into the load-bearing lattice structure could advance low-cost semi-active prosthetics by removing the need for external sensor layers while enabling force-based control. The component-level characterizations provide a useful starting point for tunable compliance and plantar-force estimation, though the decoupled nature of the sensing and actuation results limits immediate applicability to dynamic gait.
major comments (1)
- [Abstract] Abstract: The assertion that the results demonstrate sensing 'used to drive semi-active damping' is not supported by the experiments. Cyclic loading and static-posture trials establish sensor performance independently of the damper, while the damping schedule is applied via a separate feedforward schedule not derived from sensor data. No closed-loop experiment is described in which real-time plantar-force estimates from the embedded sensor modulate damper angle under load.
minor comments (1)
- [Abstract/Results] The manuscript would benefit from inclusion of quantitative metrics (e.g., RMSE or correlation coefficients for force tracking), error analysis, and fuller methods details to strengthen the evidence presented for the sensing pipeline.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback. We address the single major comment below and agree that the abstract requires clarification to avoid overstatement.
read point-by-point responses
-
Referee: [Abstract] Abstract: The assertion that the results demonstrate sensing 'used to drive semi-active damping' is not supported by the experiments. Cyclic loading and static-posture trials establish sensor performance independently of the damper, while the damping schedule is applied via a separate feedforward schedule not derived from sensor data. No closed-loop experiment is described in which real-time plantar-force estimates from the embedded sensor modulate damper angle under load.
Authors: We agree that the presented experiments characterize the embedded sensor and the adjustable damper as independent subsystems. The cyclic loading and static-posture trials evaluate sensor performance without active damper modulation, and the feedforward damping schedule is applied open-loop rather than derived from real-time sensor estimates. No closed-loop test is reported. The manuscript's central claim is therefore better described as demonstrating the feasibility of embedding sensing within the load-bearing lattice and the separate controllability of damping, which together enable future sensor-driven semi-active control. We will revise the abstract (and the corresponding sentence in the conclusion) to state this distinction explicitly and remove the phrasing that implies direct use of sensor data to drive the damper in the reported experiments. revision: yes
Circularity Check
No circularity; claims rest on independent experimental measurements
full rationale
The paper describes a prototype and reports results from separate experimental characterizations (damper angle vs. damping coefficient, lattice compression stiffness, cyclic force tracking against reference load cell, and static posture force distribution separability). No mathematical derivation chain, fitted-parameter predictions, or self-citation load-bearing steps are present. The feedforward damping schedule is explicitly described as an approximation schedule, not derived from sensor data, and the sensing and actuation results remain decoupled as stated. All load-bearing claims are grounded in direct bench-test data rather than any reduction to prior fitted values or self-referential definitions.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Time trends and geographical variation in major lower limb amputation related to peripheral arterial disease in england,
R. Maheswaranet al., “Time trends and geographical variation in major lower limb amputation related to peripheral arterial disease in england,”BJS open, vol. 8, 2024
2024
-
[2]
Estimating the prevalence of limb loss in the united states: 2005 to 2050,
K. Ziegler-Grahamet al., “Estimating the prevalence of limb loss in the united states: 2005 to 2050,”Archives of Physical Medicine and Rehabilitation, vol. 89, pp. 422–429, 2008
2005
-
[3]
Prosthetic feet: State-of-the-art review and the importance of mimicking human ankle–foot biomechanics,
R. Versluyset al., “Prosthetic feet: State-of-the-art review and the importance of mimicking human ankle–foot biomechanics,”Disability and Rehabilitation: Assistive Technology, vol. 4, pp. 65–75, 2009
2009
-
[4]
Energy storage and return (esar) prosthesis,
R. LeMoyne, “Energy storage and return (esar) prosthesis,”Advances for Prosthetic Technology, pp. 69–76, 2016
2016
-
[5]
Energy expenditure and biomechanical characteris- tics of lower limb amputee gait: The influence of prosthetic alignment and different prosthetic components,
T. Schmalzet al., “Energy expenditure and biomechanical characteris- tics of lower limb amputee gait: The influence of prosthetic alignment and different prosthetic components,”Gait & Posture, vol. 16, pp. 255–263, 2002
2002
-
[6]
Powered ankle–foot prosthesis improves walking metabolic economy,
S. Auet al., “Powered ankle–foot prosthesis improves walking metabolic economy,”IEEE Transactions on Robotics, vol. 25, pp. 51– 66, 2009
2009
-
[7]
Design and optimization of bamboo-laminate prosthetic feet: A sustainable, cost-effective alternative to carbon fiber models,
M. Minutoet al., “Design and optimization of bamboo-laminate prosthetic feet: A sustainable, cost-effective alternative to carbon fiber models,”Proceedings of the Institution of Mechanical Engineers Part L Journal of Materials Design and Applications, 2025
2025
-
[8]
A low-power ankle-foot prosthesis for push-off enhancement,
A. Mazzariniet al., “A low-power ankle-foot prosthesis for push-off enhancement,”Wearable technologies, vol. 4, 2023
2023
-
[9]
Design, development, and validation of a lightweight nonbackdrivable robotic ankle prosthesis,
T. Lenziet al., “Design, development, and validation of a lightweight nonbackdrivable robotic ankle prosthesis,”IEEE/ASME Transactions on Mechatronics, vol. 24, pp. 471–482, 2019
2019
-
[10]
Simulation of a slope adapting ankle prosthesis provided by semi-active damping,
A. K. LaPr `eet al., “Simulation of a slope adapting ankle prosthesis provided by semi-active damping,”International Conference of the IEEE Engineering in Medicine and Biology Society, vol. 2011, pp. 587–90, 2011
2011
-
[11]
The VSPA foot: A quasi-passive ankle-foot prosthesis with continuously variable stiffness,
M. K. Shepherdet al., “The VSPA foot: A quasi-passive ankle-foot prosthesis with continuously variable stiffness,”IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 25, pp. 2375– 2386, 2017
2017
-
[12]
Design and validation of a semi-active variable stiffness foot prosthesis,
E. M. Glanzeret al., “Design and validation of a semi-active variable stiffness foot prosthesis,”IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 26, pp. 2351–2359, 2018
2018
-
[13]
The SoftFoot Pro: an anthropomorphic and adaptive soft articulated prosthetic foot,
A. Paceet al., “The SoftFoot Pro: an anthropomorphic and adaptive soft articulated prosthetic foot,”Nature Communications, 2026
2026
-
[14]
A study for the development of prosthetic foot by additive manufacturing,
D. Kathrotiyaet al., “A study for the development of prosthetic foot by additive manufacturing,”Journal of the Brazilian Society of Mechanical Sciences and Engineering, vol. 45, 2023
2023
-
[15]
An affordable insole-sensor-based trans-femoral prosthesis for normal gait,
S. Panditet al., “An affordable insole-sensor-based trans-femoral prosthesis for normal gait,”Sensors, vol. 18, p. 706, 2018
2018
-
[16]
eFlesh: Highly customizable magnetic touch sensing using cut-cell microstructures,
V . Pattabiramanet al., “eFlesh: Highly customizable magnetic touch sensing using cut-cell microstructures,”arXiv:2506.09994, 2025
arXiv 2025
-
[17]
Research on damping contribution rate of key parameters of valve-controlled damping adjustable damper,
F. Xieet al., “Research on damping contribution rate of key parameters of valve-controlled damping adjustable damper,”Frontiers in Energy Research, vol. 10, 2022
2022
-
[18]
Development of adjustable fluid damper device for the bridges subjected to traffic loads,
H. Farahpouret al., “Development of adjustable fluid damper device for the bridges subjected to traffic loads,”Structures, vol. 47, pp. 1295– 1322, 2022
2022
-
[19]
Anthropometric and biomechanical characteristics of body segments in persons with spinal cord injury,
Y . Fanget al., “Anthropometric and biomechanical characteristics of body segments in persons with spinal cord injury,”Journal of biomechanics, vol. 55, p. 11–17, 2017
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.