CubifyGS: Object-Centric 3D Gaussian Splatting for Lifelong Dynamic Scene Maintenance
Pith reviewed 2026-06-30 10:00 UTC · model grok-4.3
The pith
CubifyGS maintains dynamic 3D scenes by managing reusable Gaussian assets through detection, rigid transforms, and pruning instead of full re-optimization.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
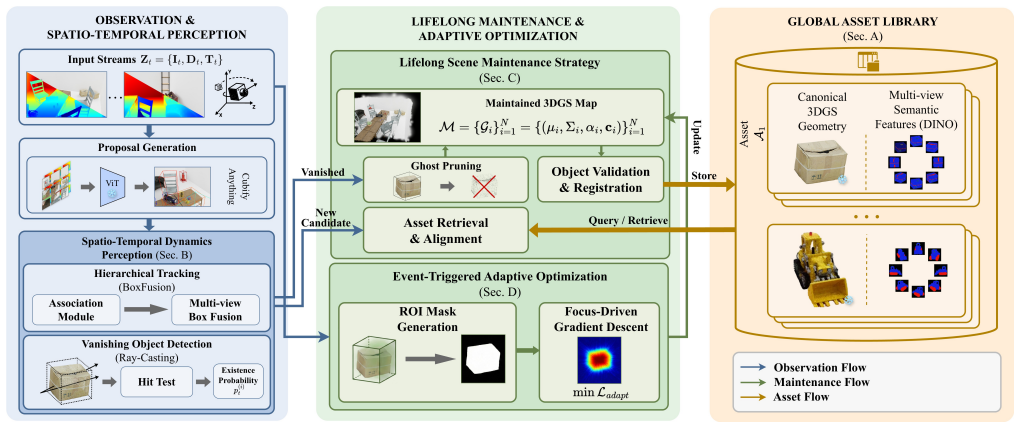
CubifyGS models movable instances as reusable Gaussian assets, detects object appearance and disappearance, and updates maps through asset retrieval, rigid transformation, and explicit pruning rather than reconstruction from scratch, while using an event-triggered adaptive optimization strategy to address geometric voids and local photometric mismatch after edits.
What carries the argument
Object-level asset management that retrieves and transforms reusable Gaussian assets on detected changes, paired with event-triggered adaptive optimization on affected regions.
If this is right
- Scene maps can be maintained across repeated object rearrangements without rebuilding from scratch each time.
- Computation stays localized to changed regions rather than the entire scene.
- Reusable assets avoid repeated modeling of the same physical objects.
- Targeted optimization reduces the time needed to resolve voids and lighting mismatches after edits.
Where Pith is reading between the lines
- The asset-retrieval approach could support incremental addition of new objects if detection extends beyond rearrangement.
- Small accumulated transform errors over many moves might still require occasional global consistency checks not described in the current method.
- Performance gains may depend on the benchmark's rigid-body assumption holding in real robot deployments.
Load-bearing premise
Reliable detection of object appearance and disappearance plus accurate rigid asset retrieval and transforms are possible without introducing new persistent errors.
What would settle it
Running the method on a sequence of object rearrangements and checking whether ghosting artifacts remain visible or whether update times match those of full re-optimization baselines.
Figures

read the original abstract
Lifelong scene mapping under rigid object rearrangement remains a fundamental challenge in robotics. While 3D Gaussian Splatting (3DGS) enables high-fidelity modeling, primitive-level updates often cause persistent ghosting and slow recovery. We propose CubifyGS, an object-level mapping framework that shifts dynamic maintenance from passive re-optimization to active asset management. CubifyGS models movable instances as reusable Gaussian assets, detects object appearance and disappearance, and updates maps through asset retrieval, rigid transformation, and explicit pruning rather than reconstruction from scratch. To address geometric voids and local photometric mismatch after such edits, we further propose an event-triggered adaptive optimization strategy that focuses computation on affected regions. We validate our approach on a newly constructed high-fidelity dynamic benchmark, demonstrating that CubifyGS improves artifact suppression and maintenance efficiency over representative reproducible baselines in the evaluated object-rearrangement setting.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes CubifyGS, an object-centric 3D Gaussian Splatting framework for lifelong dynamic scene maintenance under rigid object rearrangement. It models movable objects as reusable Gaussian assets, performs active maintenance via detection of appearance/disappearance, asset retrieval, rigid transformation, and explicit pruning (instead of passive re-optimization), and applies event-triggered adaptive optimization to address voids and photometric mismatch after edits. The approach is evaluated on a new high-fidelity dynamic benchmark, claiming improved artifact suppression and maintenance efficiency over representative baselines.
Significance. If the central claims hold, the shift to object-level active asset management could meaningfully improve efficiency and reduce ghosting in robotic lifelong mapping compared to primitive-level 3DGS updates. The introduction of a new benchmark for object-rearrangement scenarios is a positive contribution that enables reproducible comparison.
major comments (1)
- [Abstract and §4 (Experiments)] The central claim of net gains in artifact suppression and maintenance efficiency rests on the asset management pipeline (detection of appearance/disappearance, rigid asset retrieval/transforms, and pruning) succeeding without introducing persistent new errors. This premise is load-bearing yet receives no quantitative support: the evaluation reports only qualitative or aggregate map-quality metrics on the new benchmark and does not include detection precision/recall, transform-error statistics, or failure-case analysis that would confirm the steps do not undermine the comparison to baselines.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the major comment point by point below.
read point-by-point responses
-
Referee: [Abstract and §4 (Experiments)] The central claim of net gains in artifact suppression and maintenance efficiency rests on the asset management pipeline (detection of appearance/disappearance, rigid asset retrieval/transforms, and pruning) succeeding without introducing persistent new errors. This premise is load-bearing yet receives no quantitative support: the evaluation reports only qualitative or aggregate map-quality metrics on the new benchmark and does not include detection precision/recall, transform-error statistics, or failure-case analysis that would confirm the steps do not undermine the comparison to baselines.
Authors: We agree that the manuscript's evaluation relies on aggregate map-quality metrics and qualitative results to demonstrate end-to-end improvements. While these results support the overall efficacy of the object-centric approach compared to primitive-level baselines, we acknowledge that direct quantitative validation of the pipeline components (e.g., detection precision/recall, transform errors) would provide stronger evidence that individual steps do not introduce new persistent errors. In the revised manuscript, we will add these metrics along with a failure-case analysis to address this concern. revision: yes
Circularity Check
No circularity: forward method description with no self-referential reductions
full rationale
The paper describes an engineering framework for object-level 3DGS maintenance via asset retrieval, rigid transforms, pruning, and event-triggered optimization. No equations, predictions, or first-principles results are claimed that reduce to fitted inputs or self-citations by construction. The abstract and method outline a procedural pipeline whose performance claims rest on benchmark evaluation rather than definitional equivalence. This matches the default expectation of a non-circular technical contribution.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age,
C. Cadenaet al., “Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age,”IEEE Trans. Robot., vol. 32, no. 6, pp. 1309–1332, 2017
2017
-
[2]
3D Gaussian splatting for real-time radiance field rendering,
B. Kerblet al., “3D Gaussian splatting for real-time radiance field rendering,”ACM Trans. Graph., vol. 42, no. 4, July 2023. [Online]. Available: https://repo-sam.inria.fr/fungraph/3d-gaussian-splatting/
2023
-
[3]
RGBD GS-ICP SLAM,
S. Ha, J. Yeon, and H. Yu, “RGBD GS-ICP SLAM,” inProc. Eur. Conf. Comput. Vis. (ECCV). Springer, 2024, pp. 180–197
2024
-
[4]
SplaTAM: Splat, track & map 3D Gaussians for dense RGB-D SLAM,
N. Keethaet al., “SplaTAM: Splat, track & map 3D Gaussians for dense RGB-D SLAM,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), 2024
2024
-
[5]
Gaussian splatting SLAM,
H. Matsukiet al., “Gaussian splatting SLAM,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), 2024, pp. 18 039– 18 048
2024
-
[6]
GS-SLAM: Dense visual SLAM with 3D Gaussian splatting,
C. Yanet al., “GS-SLAM: Dense visual SLAM with 3D Gaussian splatting,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), 2024, pp. 19 595–19 604
2024
-
[7]
Photo-SLAM: Real-time simultaneous localiza- tion and photorealistic mapping for monocular, stereo, and RGB-D cameras,
H. Huanget al., “Photo-SLAM: Real-time simultaneous localiza- tion and photorealistic mapping for monocular, stereo, and RGB-D cameras,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), 2024, pp. 21 584–21 593
2024
-
[8]
LoopSplat: Loop closure by registering 3D Gaussian Splats,
L. Zhuet al., “LoopSplat: Loop closure by registering 3D Gaussian Splats,” inProc. Int. Conf. 3D Vis. (3DV), 2025
2025
-
[9]
SEGS-SLAM: Structure-enhanced 3D Gaussian splatting SLAM with appearance embedding,
T. Wen, Z. Liu, and Y . Fang, “SEGS-SLAM: Structure-enhanced 3D Gaussian splatting SLAM with appearance embedding,” inProc. IEEE/CVF Int. Conf. Comput. Vis. (ICCV), 2025
2025
-
[10]
RGBDS-SLAM: A RGB-D semantic dense SLAM based on 3D multi level pyramid Gaussian splatting,
Z. Caoet al., “RGBDS-SLAM: A RGB-D semantic dense SLAM based on 3D multi level pyramid Gaussian splatting,”IEEE Robot. Autom. Lett., 2025
2025
-
[11]
Rearrange indoor scenes for human-robot co-activity,
W. Wanget al., “Rearrange indoor scenes for human-robot co-activity,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA). IEEE, 2023, pp. 11 943–11 949
2023
-
[12]
Personalized robotic object rearrangement from scene context,
K. Ramachandruni and S. Chernova, “Personalized robotic object rearrangement from scene context,”arXiv preprint arXiv:2505.11108, 2025
-
[13]
WildGS-SLAM: Monocular Gaussian splatting SLAM in dynamic environments,
J. Zhenget al., “WildGS-SLAM: Monocular Gaussian splatting SLAM in dynamic environments,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), 2025
2025
-
[14]
DroneSplat: 3D Gaussian splatting for robust 3D reconstruction from in-the-wild drone imagery,
J. Tanget al., “DroneSplat: 3D Gaussian splatting for robust 3D reconstruction from in-the-wild drone imagery,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), 2025, pp. 833–843
2025
-
[15]
DGS-SLAM: Gaussian splatting SLAM in dynamic environment,
M. Konget al., “DGS-SLAM: Gaussian splatting SLAM in dynamic environment,”arXiv preprint arXiv:2411.10722, 2024
-
[16]
DG-SLAM: Robust dynamic Gaussian splatting SLAM with hybrid pose optimization,
Y . Xuet al., “DG-SLAM: Robust dynamic Gaussian splatting SLAM with hybrid pose optimization,” inAdv. Neural Inform. Process. Syst. (NeurIPS), 2024
2024
-
[17]
Gassidy: Gaussian splatting SLAM in dynamic environments,
L. Wenet al., “Gassidy: Gaussian splatting SLAM in dynamic environments,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA). IEEE, 2025, pp. 8471–8477
2025
-
[18]
4D Gaussian Splatting SLAM,
Y . Liet al., “4D Gaussian Splatting SLAM,” inProc. IEEE/CVF Int. Conf. Comput. Vis. (ICCV), 2025, pp. 25 019–25 028
2025
-
[19]
PG-SLAM: Photorealistic and geometry-aware RGB-D SLAM in dynamic environments,
H. Liet al., “PG-SLAM: Photorealistic and geometry-aware RGB-D SLAM in dynamic environments,”IEEE Trans. Robot., 2025
2025
-
[20]
AdaHuman: Animatable detailed 3D human generation with compositional multiview diffusion,
Y . Huanget al., “AdaHuman: Animatable detailed 3D human generation with compositional multiview diffusion,”arXiv preprint arXiv:2505.24877, 2025
-
[21]
4DTAM: Non-rigid tracking and mapping via dynamic surface Gaussians,
H. Matsuki, G. Bae, and A. J. Davison, “4DTAM: Non-rigid tracking and mapping via dynamic surface Gaussians,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), 2025, pp. 26 921– 26 932
2025
-
[22]
ODHSR: Online dense 3D reconstruction of humans and scenes from monocular videos,
Z. Zhanget al., “ODHSR: Online dense 3D reconstruction of humans and scenes from monocular videos,” inProc. IEEE/CVF Conf. Com- put. Vis. Pattern Recognit. (CVPR), 2025, pp. 21 824–21 835
2025
-
[23]
Hugs: Human Gaussian Splats,
M. Kocabaset al., “Hugs: Human Gaussian Splats,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), 2024, pp. 505–515
2024
-
[24]
BDGS-SLAM: A probabilistic 3D Gaussian splatting framework for robust SLAM in dynamic environments,
T. Yanget al., “BDGS-SLAM: A probabilistic 3D Gaussian splatting framework for robust SLAM in dynamic environments,”Sensors, vol. 25, no. 21, p. 6641, 2025
2025
-
[25]
SLAM++: Simultaneous localisation and mapping at the level of objects,
R. F. Salas-Morenoet al., “SLAM++: Simultaneous localisation and mapping at the level of objects,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), 2013, pp. 1352–1359
2013
-
[26]
RIO: 3D object instance re-localization in changing indoor environments,
J. Waldet al., “RIO: 3D object instance re-localization in changing indoor environments,” inProc. IEEE/CVF Int. Conf. Comput. Vis. (ICCV), 2019, pp. 7658–7667
2019
-
[27]
Cubify Anything: Scaling indoor 3D object detection,
J. Lazarowet al., “Cubify Anything: Scaling indoor 3D object detection,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), 2025, pp. 22 225–22 233
2025
-
[28]
BoxFusion: Reconstruction-free open-vocabulary 3D object detection via real-time multi-view box fusion,
Y . Lanet al., “BoxFusion: Reconstruction-free open-vocabulary 3D object detection via real-time multi-view box fusion,”Comput. Graph. Forum, vol. 44, no. 7, p. e70254, 2025
2025
-
[29]
MM-Spatial: Exploring 3D spatial understanding in multimodal LLMs,
E. Daxbergeret al., “MM-Spatial: Exploring 3D spatial understanding in multimodal LLMs,” inProc. IEEE/CVF Int. Conf. Comput. Vis. (ICCV), 2025, pp. 7395–7408
2025
-
[30]
SceneScript: Reconstructing scenes with an au- toregressive structured language model,
A. Avetisyanet al., “SceneScript: Reconstructing scenes with an au- toregressive structured language model,” inProc. Eur. Conf. Comput. Vis. (ECCV). Springer, 2024, pp. 247–263
2024
-
[31]
SpatialLM: Training large language models for structured indoor modeling,
Y . Maoet al., “SpatialLM: Training large language models for structured indoor modeling,” inAdv. Neural Inform. Process. Syst. (NeurIPS), 2025
2025
-
[32]
LiteReality: Graphics-ready 3D scene reconstruction from RGB-D scans,
Z. Huanget al., “LiteReality: Graphics-ready 3D scene reconstruction from RGB-D scans,”arXiv preprint arXiv:2507.02861, 2025
-
[33]
The Replica Dataset: A Digital Replica of Indoor Spaces
J. Straubet al., “The Replica dataset: A digital replica of indoor spaces,”arXiv preprint arXiv:1906.05797, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1906
-
[34]
A benchmark for the evaluation of RGB-D SLAM systems,
J. Sturmet al., “A benchmark for the evaluation of RGB-D SLAM systems,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2012, pp. 573–580
2012
-
[35]
Dy3DGS-SLAM: Monocular 3D Gaussian splatting SLAM for dynamic environments,
M. Liet al., “Dy3DGS-SLAM: Monocular 3D Gaussian splatting SLAM for dynamic environments,”arXiv preprint arXiv:2506.05965, 2025
-
[36]
CL-Splats: Continual learning of Gaussian splatting with local optimization,
J. Ackermannet al., “CL-Splats: Continual learning of Gaussian splatting with local optimization,” inProc. IEEE/CVF Int. Conf. Comput. Vis. (ICCV), 2025, pp. 7808–7817
2025
-
[37]
Khronos: A unified approach for spatio-temporal metric-semantic SLAM in dynamic environments,
L. Schmidet al., “Khronos: A unified approach for spatio-temporal metric-semantic SLAM in dynamic environments,” inProc. Robot. Sci. Syst. (RSS), 2024
2024
-
[38]
DynaMem: Online dynamic spatio-semantic memory for open world mobile manipulation,
P. Liuet al., “DynaMem: Online dynamic spatio-semantic memory for open world mobile manipulation,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2025
2025
-
[39]
ORB-SLAM3: An accurate open-source library for visual, visual–inertial, and multimap SLAM,
C. Camposet al., “ORB-SLAM3: An accurate open-source library for visual, visual–inertial, and multimap SLAM,”IEEE Trans. Robot., vol. 37, no. 6, pp. 1874–1890, 2021
2021
-
[40]
MonoSLAM: Real-time single camera SLAM,
A. J. Davisonet al., “MonoSLAM: Real-time single camera SLAM,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 29, no. 6, pp. 1052–1067, 2007
2007
-
[41]
NeRF: Representing scenes as neural radiance fields for view synthesis,
B. Mildenhallet al., “NeRF: Representing scenes as neural radiance fields for view synthesis,”Commun. ACM, vol. 65, no. 1, pp. 99–106, 2021
2021
-
[42]
NeRF-SLAM: Real- time dense monocular SLAM with neural radiance fields,
A. Rosinol, J. J. Leonard, and L. Carlone, “NeRF-SLAM: Real- time dense monocular SLAM with neural radiance fields,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2023, pp. 3437–3444
2023
-
[43]
iMAP: Implicit mapping and positioning in real- time,
E. Sucaret al., “iMAP: Implicit mapping and positioning in real- time,” inProc. IEEE/CVF Int. Conf. Comput. Vis. (ICCV), 2021, pp. 6229–6238
2021
-
[44]
O. Sim ´eoniet al., “DINOv3,”arXiv preprint arXiv:2508.10104, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[45]
ReFusion: 3D reconstruction in dynamic environments for RGB-D cameras exploiting residuals,
E. Palazzoloet al., “ReFusion: 3D reconstruction in dynamic environments for RGB-D cameras exploiting residuals,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2019. [Online]. Available: https://www.ipb.uni-bonn.de/pdfs/palazzolo2019iros.pdf
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.