SPACE: Swarm Pheromone Fields for Adaptive Collision-Aware Exploration
Pith reviewed 2026-06-30 07:31 UTC · model grok-4.3
The pith
SPACE uses decentralized pheromone fields to achieve the lowest inter-robot contact rates in large swarms while keeping coverage time within 2 percent of optimal planners.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
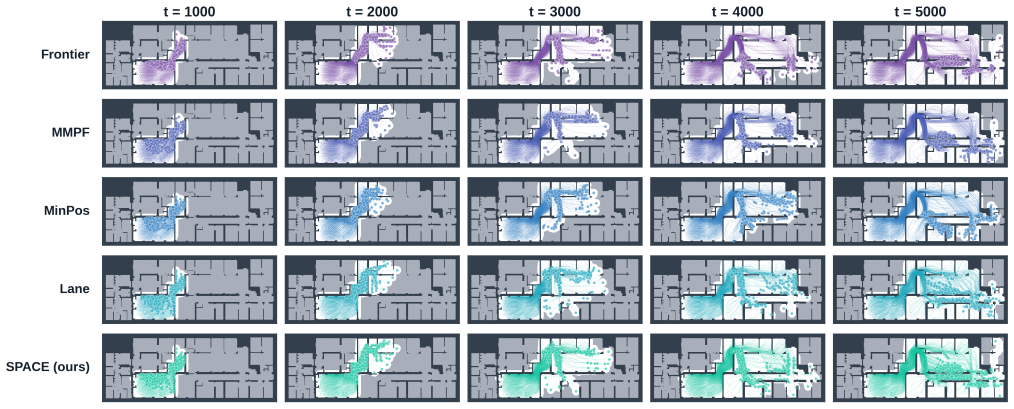
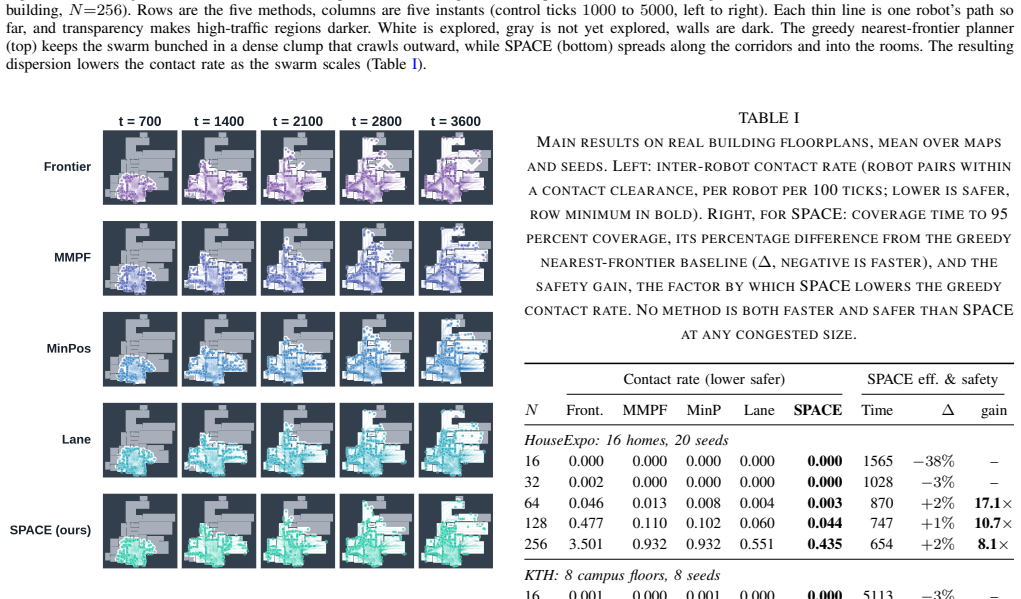
SPACE lies on the empirical Pareto frontier. It attains the lowest inter-robot contact rate at every congested swarm size, four to seventeen times fewer than a greedy nearest-frontier planner, while keeping coverage time within about two percent of that near time-optimal planner. The results indicate that, at this scale, coordination mainly improves safety rather than coverage time.
What carries the argument
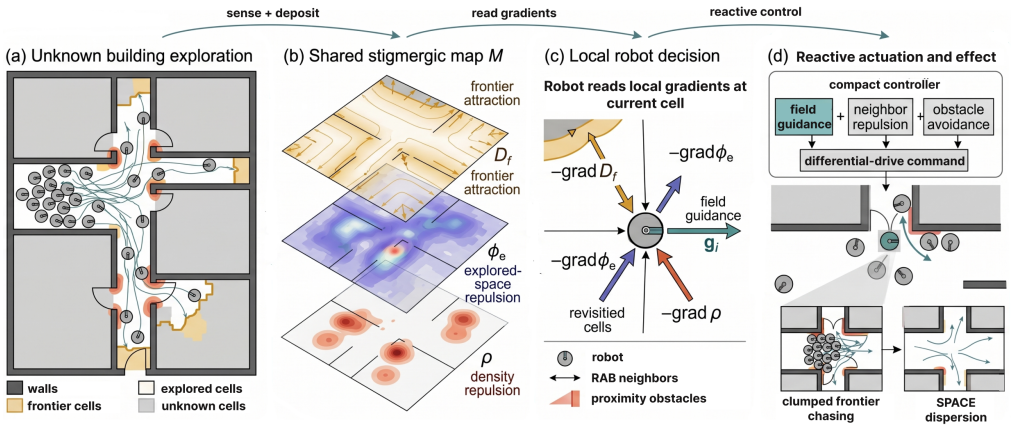
Swarm Pheromone Fields that combine an attractive frontier pheromone, a repellent explore pheromone, and a robot-density field to enable decentralized coordination without central control.
If this is right
- At swarm sizes from four to two hundred and fifty-six robots, safety gains from coordination outweigh any further reductions in coverage time.
- The shared field approach scales without requiring direct robot-to-robot messaging beyond field updates.
- On real building layouts, the method balances exploration efficiency and collision avoidance better than nearest-frontier or time-optimal alternatives.
Where Pith is reading between the lines
- Similar field mechanisms might extend to other swarm tasks such as area coverage or object transport where density control matters.
- The emphasis on safety over speed suggests redesigning benchmarks for swarm exploration to prioritize contact metrics alongside time.
- If field maintenance truly adds negligible cost, the method could transfer to low-power embedded hardware in physical swarms.
Load-bearing premise
That simulated inter-robot contact rates on the HouseExpo and KTH floorplan datasets serve as a valid proxy for real-world safety and that decentralized pheromone field maintenance incurs negligible communication or computation costs.
What would settle it
Physical robot experiments on comparable indoor layouts that directly count actual collisions and measure coverage times against the same baselines.
Figures

read the original abstract
Massive robot swarms can explore unknown environments quickly, but adding robots eventually stops helping. Doorways and dense traffic create congestion, increasing inter-robot contacts and reducing the value of each additional robot. We study this safety-efficiency tradeoff for ground swarms of tens to hundreds of robots. We present SPACE, Swarm Pheromone Fields for Adaptive Collision-Aware Exploration. Inspired by ant foraging, SPACE maintains a shared environmental field with an attractive frontier pheromone, a repellent explore pheromone, and a fast robot-density field. Coordination is decentralized and mediated through this field. We evaluate SPACE on real building floorplans, namely sixteen home layouts from the HouseExpo dataset and eight campus floors from the KTH dataset, with swarms of up to two hundred and fifty-six robots. SPACE lies on the empirical Pareto frontier. It attains the lowest inter-robot contact rate at every congested swarm size, four to seventeen times fewer than a greedy nearest-frontier planner, while keeping coverage time within about two percent of that near time-optimal planner. The results indicate that, at this scale, coordination mainly improves safety rather than coverage time.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces SPACE, a decentralized swarm exploration algorithm that maintains a shared pheromone field with attractive frontier, repellent explore, and robot-density components. Evaluated in simulation on sixteen HouseExpo home layouts and eight KTH campus floors using swarms of up to 256 robots, it claims SPACE lies on the empirical Pareto frontier: it achieves the lowest inter-robot contact rates at every congested swarm size (4-17 times fewer than a greedy nearest-frontier planner) while keeping coverage time within about 2% of a near time-optimal planner. The results suggest coordination primarily improves safety rather than coverage time at this scale.
Significance. If the simulation results prove robust, the work would be significant for multi-robot systems by providing a scalable, fully decentralized method to manage the safety-efficiency tradeoff in congested environments, using realistic building floorplans rather than synthetic maps.
major comments (2)
- [Evaluation] Evaluation section: The central Pareto-frontier claim rests entirely on simulated inter-robot contact rates serving as a proxy for real-world safety, yet the manuscript reports no hardware experiments, sensor noise injection, or dynamics modeling (e.g., wheel slip or localization error). If these effects increase contacts even modestly, the reported 4-17x safety advantage and frontier position would not hold.
- [Method] Method section: The paper asserts that decentralized pheromone-field maintenance incurs negligible communication and computation costs, but provides no bandwidth, latency, or update-frequency measurements; any non-negligible cost would directly affect both contact-rate and coverage-time metrics used to support the Pareto claim.
minor comments (1)
- [Abstract] Abstract and results: The coverage-time comparison is stated as 'within about two percent' without accompanying error bars, exact percentages per dataset, or statistical significance tests; these should be reported explicitly.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting important aspects of the evaluation and method. We address each major comment below and outline planned revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [Evaluation] Evaluation section: The central Pareto-frontier claim rests entirely on simulated inter-robot contact rates serving as a proxy for real-world safety, yet the manuscript reports no hardware experiments, sensor noise injection, or dynamics modeling (e.g., wheel slip or localization error). If these effects increase contacts even modestly, the reported 4-17x safety advantage and frontier position would not hold.
Authors: We agree that the evaluation relies on idealized simulation without hardware validation, noise injection, or dynamics modeling such as wheel slip or localization error. The contact-rate proxy for safety holds only under these assumptions. We will add a dedicated limitations subsection that explicitly states the perfect-sensing and actuation assumptions and discusses how modest real-world perturbations could erode the reported safety margins and Pareto position. This will appropriately scope the claims to simulation while preserving the contribution of the decentralized coordination approach. revision: yes
-
Referee: [Method] Method section: The paper asserts that decentralized pheromone-field maintenance incurs negligible communication and computation costs, but provides no bandwidth, latency, or update-frequency measurements; any non-negligible cost would directly affect both contact-rate and coverage-time metrics used to support the Pareto claim.
Authors: The assertion of negligible costs follows from the local, decentralized update rules (each robot modifies only nearby pheromone cells and reads local values). We acknowledge that explicit measurements are absent. We will revise the method section to include concrete estimates drawn from the simulation implementation: per-robot computation remains O(1) per time step for local field updates, and communication is limited to sparse local exchanges when robots are within sensing range. These estimates will be reported with the existing experimental setup; if they indicate non-negligible overhead in certain regimes, the Pareto claim will be qualified accordingly. revision: yes
Circularity Check
No circularity: empirical comparisons rest on external baselines and datasets
full rationale
The paper introduces an algorithmic swarm coordination method (pheromone fields) and evaluates it via simulation on independent public datasets (HouseExpo, KTH floorplans) against external baseline planners (greedy nearest-frontier, near time-optimal). No equations, predictions, or uniqueness claims reduce by construction to fitted parameters, self-definitions, or self-citation chains. The central Pareto-frontier claim is a direct empirical observation from those comparisons, not a renaming or ansatz smuggling. Self-citations, if present, are not load-bearing for the reported results.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age,
C. Cadena, L. Carlone, H. Carrillo, Y . Latif, D. Scaramuzza, J. Neira, I. Reid, and J. J. Leonard, “Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age,”IEEE Trans. Robotics, vol. 32, no. 6, pp. 1309–1332, 2016
2016
-
[2]
Conges- tion and scalability in robot swarms: A study on collective decision making,
M. Soma, V . S. Vardharajan, H. Hamann, and G. Beltrame, “Conges- tion and scalability in robot swarms: A study on collective decision making,” arXiv:2307.08568, 2023
-
[3]
Quality-sensitive foraging by a robot swarm through virtual pheromone trails,
A. Font Llenas, M. S. Talamali, X. Xu, J. A. R. Marshall, and A. Reina, “Quality-sensitive foraging by a robot swarm through virtual pheromone trails,” inSwarm Intelligence (ANTS), LNCS 11172, Springer, 2018
2018
-
[4]
A frontier-based approach for autonomous exploration,
B. Yamauchi, “A frontier-based approach for autonomous exploration,” inProc. IEEE Int. Symp. Computational Intelligence in Robotics and Automation, 1997
1997
-
[5]
Frontier-based exploration using multiple robots,
B. Yamauchi, “Frontier-based exploration using multiple robots,” in Proc. 2nd Int. Conf. Autonomous Agents (AGENTS), 1998, pp. 47–53
1998
-
[6]
Coordi- nated multi-robot exploration,
W. Burgard, M. Moors, C. Stachniss, and F. E. Schneider, “Coordi- nated multi-robot exploration,”IEEE Trans. Robotics, vol. 21, no. 3, pp. 376–386, 2005
2005
-
[7]
Receding horizon ‘next-best-view’ planner for 3D exploration,
A. Bircher, M. Kamel, K. Alexis, H. Oleynikova, and R. Siegwart, “Receding horizon ‘next-best-view’ planner for 3D exploration,” in Proc. IEEE Int. Conf. Robotics and Automation (ICRA), 2016, pp. 1462–1468
2016
-
[8]
RACER: Rapid collaborative explo- ration with a decentralized multi-UA V system,
B. Zhou, H. Xu, and S. Shen, “RACER: Rapid collaborative explo- ration with a decentralized multi-UA V system,”IEEE Trans. Robotics, vol. 39, no. 3, pp. 1816–1835, 2023
2023
-
[9]
TARE: A hierarchical framework for efficiently exploring complex 3D environments,
C. Cao, H. Zhu, H. Choset, and J. Zhang, “TARE: A hierarchical framework for efficiently exploring complex 3D environments,” in Robotics: Science and Systems, 2021
2021
-
[10]
Deep reinforcement learning robot for search and rescue applications: Exploration in unknown cluttered environments,
F. Niroui, K. Zhang, Z. Kashino, and G. Nejat, “Deep reinforcement learning robot for search and rescue applications: Exploration in unknown cluttered environments,”IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 610–617, 2019
2019
-
[11]
Explore-Bench: Data sets, metrics and evaluations for frontier-based and deep-reinforcement-learning-based autonomous exploration,
Y . Xu, J. Yu, J. Tang, et al., “Explore-Bench: Data sets, metrics and evaluations for frontier-based and deep-reinforcement-learning-based autonomous exploration,” inProc. IEEE ICRA, 2022
2022
-
[12]
La reconstruction du nid et les coordinations interindi- viduelles chez Bellicositermes natalensis et Cubitermes sp. La th ´eorie de la stigmergie,
P.-P. Grass ´e, “La reconstruction du nid et les coordinations interindi- viduelles chez Bellicositermes natalensis et Cubitermes sp. La th ´eorie de la stigmergie,”Insectes Sociaux, vol. 6, no. 1, pp. 41–80, 1959
1959
-
[13]
A brief history of stigmergy,
G. Theraulaz and E. Bonabeau, “A brief history of stigmergy,”Artifi- cial Life, vol. 5, no. 2, pp. 97–116, 1999
1999
-
[14]
The biological principles of swarm intelligence,
S. Garnier, J. Gautrais, and G. Theraulaz, “The biological principles of swarm intelligence,”Swarm Intelligence, vol. 1, no. 1, pp. 3–31, 2007
2007
-
[15]
Insect communication: No entry signal in ant foraging,
E. J. H. Robinson, D. E. Jackson, M. Holcombe, and F. L. W. Ratnieks, “Insect communication: No entry signal in ant foraging,”Nature, vol. 438, no. 7067, p. 442, 2005
2005
-
[16]
ARGoS: A modular, parallel, multi-engine simulator for multi-robot systems,
C. Pinciroli, V . Trianni, R. O’Grady, et al., “ARGoS: A modular, parallel, multi-engine simulator for multi-robot systems,”Swarm In- telligence, vol. 6, no. 4, pp. 271–295, 2012
2012
-
[17]
HouseExpo: A large-scale 2D indoor layout dataset for learning- based algorithms on mobile robots,
T. Li, D. Ho, C. Li, D. Zhu, C. Wang, and M. Q.-H. Meng, “HouseExpo: A large-scale 2D indoor layout dataset for learning- based algorithms on mobile robots,” inProc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS), 2020, pp. 5839–5846
2020
-
[18]
What can we learn from 38,000 rooms? Reasoning about unexplored space in indoor environments,
A. Aydemir, P. Jensfelt, and J. Folkesson, “What can we learn from 38,000 rooms? Reasoning about unexplored space in indoor environments,” inProc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS), 2012, pp. 4675–4682
2012
-
[19]
SMMR-Explore: SubMap-based multi- robot exploration system with multi-robot multi-target potential field exploration method,
J. Yu, J. Tong, Y . Xu, et al., “SMMR-Explore: SubMap-based multi- robot exploration system with multi-robot multi-target potential field exploration method,” inProc. IEEE ICRA, 2021
2021
-
[20]
MinPos: A novel frontier al- location algorithm for multi-robot exploration,
A. Bautin, O. Simonin, and F. Charpillet, “MinPos: A novel frontier al- location algorithm for multi-robot exploration,” inIntelligent Robotics and Applications (ICIRA), LNCS 7507, Springer, 2012
2012
-
[21]
Coordination for multi-robot exploration and mapping,
R. Simmons, D. Apfelbaum, W. Burgard, D. Fox, M. Moors, S. Thrun, and H. Younes, “Coordination for multi-robot exploration and mapping,” inProc. AAAI Conf. Artificial Intelligence, 2000, pp. 852– 858
2000
-
[22]
Multi-robot exploration controlled by a market economy,
R. Zlot, A. Stentz, M. B. Dias, and S. Thayer, “Multi-robot exploration controlled by a market economy,” inProc. IEEE Int. Conf. Robotics and Automation (ICRA), 2002, pp. 3016–3023
2002
-
[23]
Information gain-based exploration using Rao-Blackwellized particle filters,
C. Stachniss, G. Grisetti, and W. Burgard, “Information gain-based exploration using Rao-Blackwellized particle filters,” inRobotics: Science and Systems, 2005, pp. 65–72
2005
-
[24]
Dec- MCTS: Decentralized planning for multi-robot active perception,
G. Best, O. M. Cliff, T. Patten, R. R. Mettu, and R. Fitch, “Dec- MCTS: Decentralized planning for multi-robot active perception,”Int. J. Robotics Research, vol. 38, no. 2–3, pp. 316–337, 2019
2019
-
[25]
Swarm robotics: From sources of inspiration to domains of application,
E. S ¸ahin, “Swarm robotics: From sources of inspiration to domains of application,” inSwarm Robotics, LNCS 3342, Springer, 2005, pp. 10–20
2005
-
[26]
Swarm robotics: A review from the swarm engineering perspective,
M. Brambilla, E. Ferrante, M. Birattari, and M. Dorigo, “Swarm robotics: A review from the swarm engineering perspective,”Swarm Intelligence, vol. 7, no. 1, pp. 1–41, 2013
2013
-
[27]
Hamann,Swarm Robotics: A Formal Approach
H. Hamann,Swarm Robotics: A Formal Approach. Springer, 2018
2018
-
[28]
Bonabeau, M
E. Bonabeau, M. Dorigo, and G. Theraulaz,Swarm Intelligence: From Natural to Artificial Systems. Oxford University Press, 1999
1999
-
[29]
Ant colony optimization,
M. Dorigo, M. Birattari, and T. St ¨utzle, “Ant colony optimization,” IEEE Computational Intelligence Magazine, vol. 1, no. 4, pp. 28–39, 2006
2006
-
[30]
Pheromone robotics,
D. Payton, M. Daily, R. Estowski, M. Howard, and C. Lee, “Pheromone robotics,”Autonomous Robots, vol. 11, no. 3, pp. 319– 324, 2001
2001
-
[31]
Testing the limits of pheromone stigmergy in high-density robot swarms,
E. R. Hunt, S. Jones, and S. Hauert, “Testing the limits of pheromone stigmergy in high-density robot swarms,”Royal Society Open Science, vol. 6, no. 11, 190225, 2019
2019
-
[32]
Motion planning in dynamic environments using velocity obstacles,
P. Fiorini and Z. Shiller, “Motion planning in dynamic environments using velocity obstacles,”Int. J. Robotics Research, vol. 17, no. 7, pp. 760–772, 1998
1998
-
[33]
Reciprocal velocity obstacles for real-time multi-agent navigation,
J. van den Berg, M. Lin, and D. Manocha, “Reciprocal velocity obstacles for real-time multi-agent navigation,” inProc. IEEE Int. Conf. Robotics and Automation (ICRA), 2008, pp. 1928–1935
2008
-
[34]
Reciprocal n-body collision avoidance,
J. van den Berg, S. J. Guy, M. Lin, and D. Manocha, “Reciprocal n-body collision avoidance,” inRobotics Research (ISRR), Springer Tracts in Advanced Robotics, vol. 70, 2011, pp. 3–19
2011
-
[35]
Control barrier functions: Theory and applications,
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, and P. Tabuada, “Control barrier functions: Theory and applications,” inProc. European Control Conf. (ECC), 2019, pp. 3420–3431
2019
-
[36]
Safety barrier certificates for collisions-free multirobot systems,
L. Wang, A. D. Ames, and M. Egerstedt, “Safety barrier certificates for collisions-free multirobot systems,”IEEE Trans. Robotics, vol. 33, no. 3, pp. 661–674, 2017
2017
-
[37]
Decentralized probabilis- tic multi-robot collision avoidance using buffered uncertainty-aware V oronoi cells,
H. Zhu, B. Brito, and J. Alonso-Mora, “Decentralized probabilis- tic multi-robot collision avoidance using buffered uncertainty-aware V oronoi cells,”Autonomous Robots, vol. 46, pp. 401–420, 2022
2022
-
[38]
Conflict-based search for optimal multi-agent pathfinding,
G. Sharon, R. Stern, A. Felner, and N. R. Sturtevant, “Conflict-based search for optimal multi-agent pathfinding,”Artificial Intelligence, vol. 219, pp. 40–66, 2015
2015
-
[39]
Priority inheritance with backtracking for iterative multi-agent path finding,
K. Okumura, M. Machida, X. D ´efago, and Y . Tamura, “Priority inheritance with backtracking for iterative multi-agent path finding,” inProc. Int. Joint Conf. Artificial Intelligence (IJCAI), 2019, pp. 535– 542
2019
-
[40]
Congestion- aware multi-agent path planning for large-scale navigation in dense environments,
R. Kato, K. Okumura, R. Sasaki, and Y . Yokomachi, “Congestion- aware multi-agent path planning for large-scale navigation in dense environments,”IEEE Robotics and Automation Letters, 2025
2025
-
[41]
CGLR: Dense multi-agent navigation using V oronoi cells and congestion metric-based replanning,
S. H. Arul and D. Manocha, “CGLR: Dense multi-agent navigation using V oronoi cells and congestion metric-based replanning,” inProc. IEEE/RSJ IROS, 2022
2022
-
[42]
Coverage control for mobile sensing networks,
J. Cort ´es, S. Mart´ınez, T. Karatas, and F. Bullo, “Coverage control for mobile sensing networks,”IEEE Trans. Robotics and Automation, vol. 20, no. 2, pp. 243–255, 2004
2004
-
[43]
Mobile sensor network deployment using potential fields: A distributed, scalable solution to the area coverage problem,
A. Howard, M. J. Matari ´c, and G. S. Sukhatme, “Mobile sensor network deployment using potential fields: A distributed, scalable solution to the area coverage problem,” inDistributed Autonomous Robotic Systems (DARS), 2002, pp. 299–308
2002
-
[44]
Decentralized, adaptive coverage control for networked robots,
M. Schwager, D. Rus, and J.-J. Slotine, “Decentralized, adaptive coverage control for networked robots,”Int. J. Robotics Research, vol. 28, no. 3, pp. 357–375, 2009
2009
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.