Communication-Aware Robot Execution for Cloud Inference under Spatially Heterogeneous Connectivity
Pith reviewed 2026-07-01 05:39 UTC · model grok-4.3
The pith
Treating the next cloud request point as a motion decision during primitive execution enables reliable task progress under heterogeneous connectivity.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
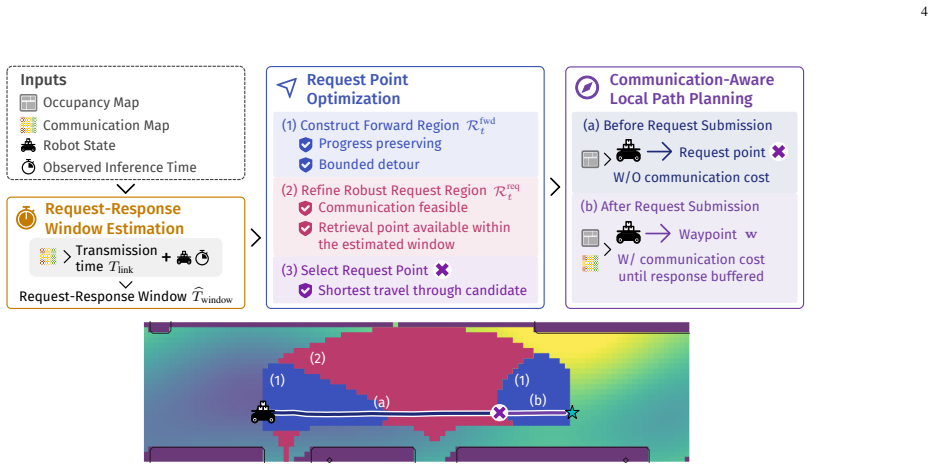
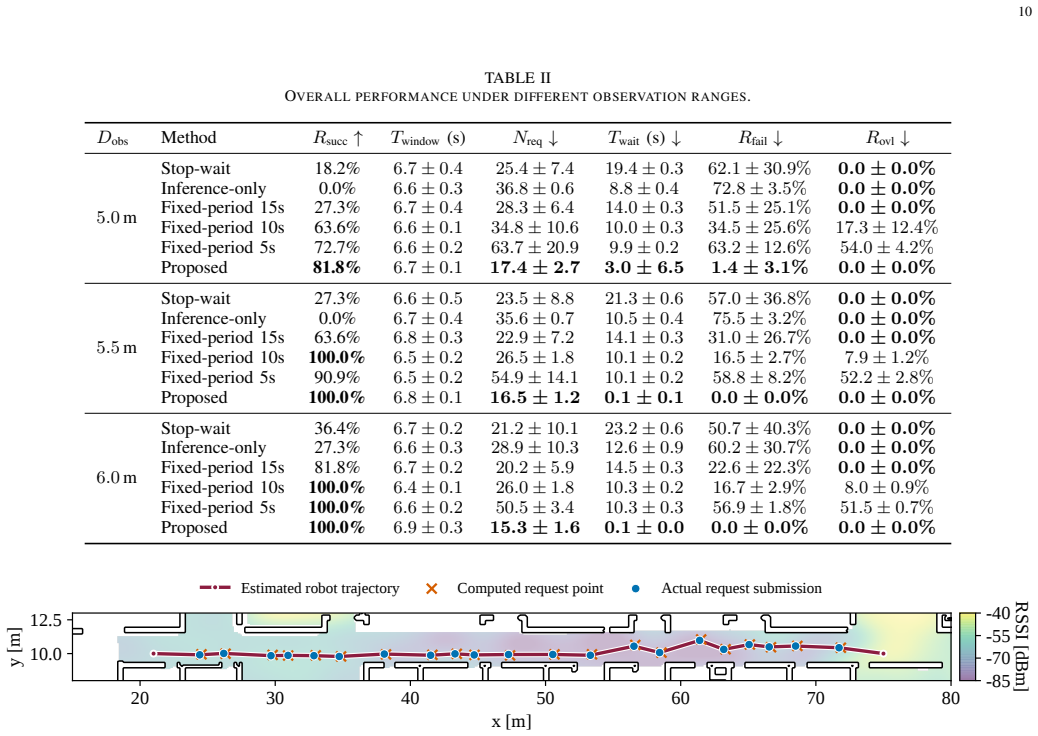
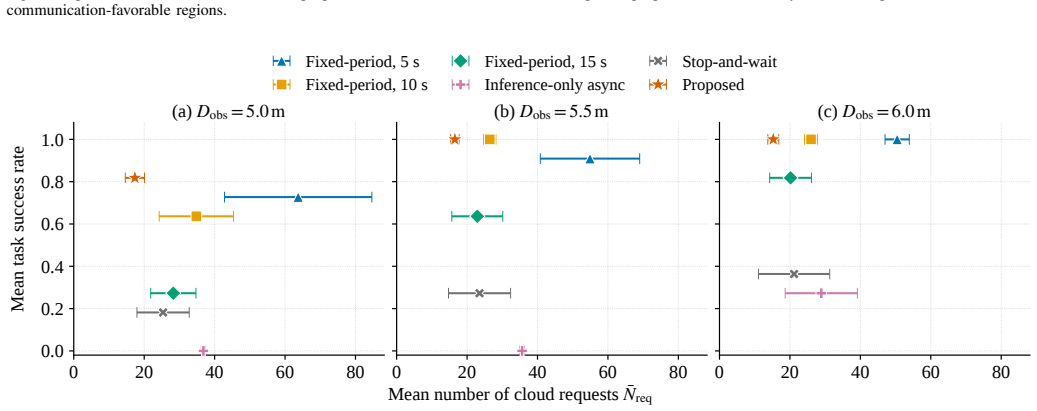
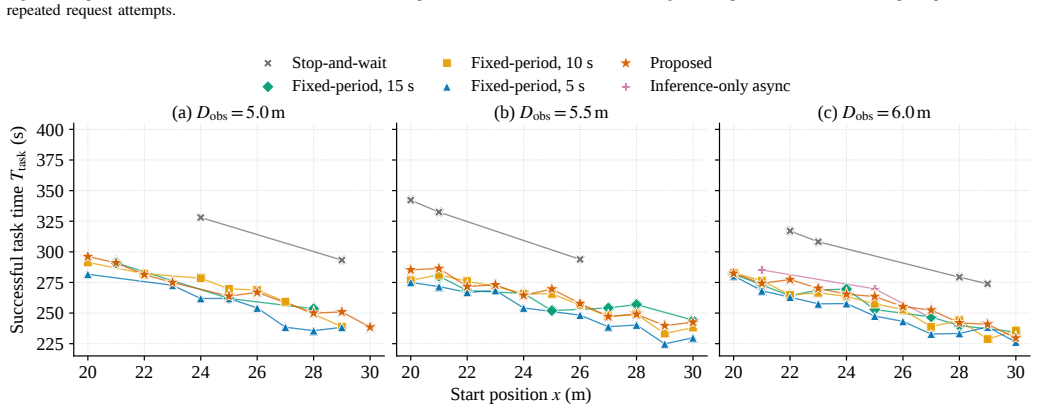
The framework defines the request-response window to include uplink transmission, cloud inference, downlink retrieval, and inference uncertainty. Using this window together with a pre-available communication map, the next request point is chosen during ongoing primitive execution to provide sufficient communication quality while preserving task progress within the primitive's finite support. This point is then incorporated into the local planner, guiding the robot to submit the request and continue execution with adequate connectivity for retrieving the next result. Experiments confirm this yields the best or tied-best task success with fewer attempts and lower failure rates.
What carries the argument
The request-response window, which quantifies the duration of the full cloud cycle to guide selection of a submission location as a motion-planning constraint.
If this is right
- The method achieves the best or tied-best task success among compared approaches.
- It requires fewer request attempts than alternatives.
- It produces lower request failure rates.
- The local planner ensures guidance to the request point before submission and continued execution with sufficient connectivity.
Where Pith is reading between the lines
- This selection strategy could extend to tasks with variable primitive durations by recalculating the window on the fly.
- Updating the communication map online from ongoing measurements might reduce reliance on pre-collected data.
- The same window concept could apply to other cloud services whose response times vary with input complexity.
Load-bearing premise
A sufficiently accurate communication map must be available beforehand, and the request-response window must be characterizable reliably as a constraint for motion planning during primitive execution.
What would settle it
An experiment in the measured indoor wireless scenario where the proposed method shows lower task success rates, more request attempts, or higher failure rates than the compared baselines.
Figures



read the original abstract
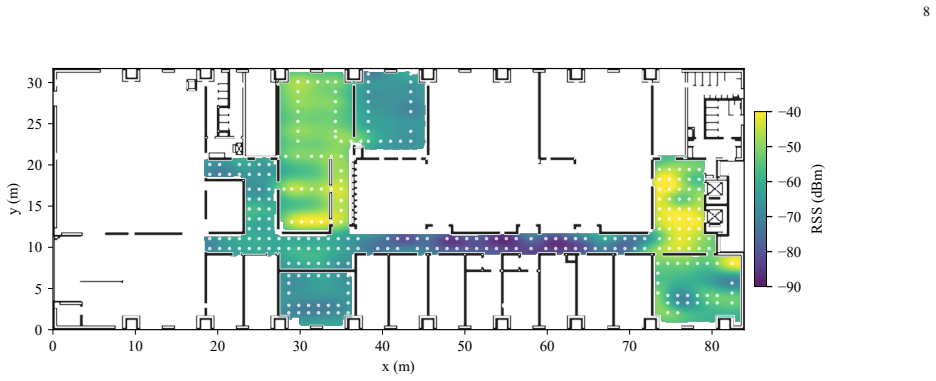
Cloud-hosted foundation models enable robots to use semantic reasoning beyond onboard computational limits. In this setting, the robot executes a currently available primitive generated by the cloud, and continued task progress requires the next cloud result before this primitive is exhausted. This execution becomes fragile under spatially heterogeneous connectivity, because the current primitive determines when the next result is needed, whereas the wireless environment determines where the next request can be submitted and where the response can be retrieved. Strategies that reduce latency or improve individual transmissions can shorten this dependency, but they do not determine a submission location that supports reliable upload and leaves a feasible opportunity for response retrieval. To address this problem, we introduce the request--response window, which characterizes the time required for the next cloud cycle, including uplink transmission, cloud inference, downlink retrieval, and inference uncertainty. Building on this window and an available communication map, the proposed framework treats the next request point as a motion decision during ongoing primitive execution, selecting it to provide sufficient communication quality for cloud request submission while preserving progress within the finite support of the current primitive. The selected request point is incorporated into a local planner, which guides the robot toward the request point before submission and then continues task execution while maintaining sufficient connectivity for retrieving the next cloud result. Experiments in an indoor wireless scenario built from measurements show that the proposed method achieves the best or tied-best task success among the compared methods, while using fewer request attempts and producing lower request failure rates.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that introducing a request-response window (characterizing uplink, cloud inference, downlink, and uncertainty time) together with an externally supplied communication map allows a robot to treat the next cloud-request location as a motion-planning decision inside the support of the current primitive; the resulting local planner yields higher or tied task success, fewer request attempts, and lower failure rates than compared methods in an indoor wireless scenario constructed from measurements.
Significance. If the central experimental claim holds, the work supplies a concrete mechanism for coupling motion constraints with spatially varying link quality in cloud-robot systems, addressing a practical bottleneck when foundation-model inference must occur before a primitive is exhausted. The formulation is notable for avoiding reduction to a fitted quantity defined by the authors' own equations and for taking the communication map as an external input.
major comments (2)
- [Abstract / Experiments] Abstract and Experiments section: the reported superiority in task success, request attempts, and failure rates is presented without any description of baseline implementations, statistical significance tests, or controls against post-hoc tuning of the request-response window parameters; because these experiments constitute the sole empirical support for the central claim, the comparison cannot be evaluated as currently written.
- [Abstract] Abstract: the method treats an accurate communication map as given and selects the request point as a hard constraint inside the request-response window; no sensitivity analysis to spatial or temporal map error (or protocol for map acquisition) is provided, yet even modest RF-map inaccuracies would directly invalidate the assumed uplink/downlink quality at the chosen location and thereby undermine the reported reductions in request failures.
minor comments (1)
- [Abstract] The term 'request-response window' is introduced without an explicit equation or pseudocode definition in the provided abstract; a compact mathematical statement would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which highlight areas where the experimental presentation can be strengthened. We address each major comment below and will incorporate revisions to improve clarity and robustness.
read point-by-point responses
-
Referee: [Abstract / Experiments] Abstract and Experiments section: the reported superiority in task success, request attempts, and failure rates is presented without any description of baseline implementations, statistical significance tests, or controls against post-hoc tuning of the request-response window parameters; because these experiments constitute the sole empirical support for the central claim, the comparison cannot be evaluated as currently written.
Authors: We agree that additional detail on the baselines and experimental controls is needed to allow full evaluation of the comparisons. In the revised manuscript we will expand the Experiments section with explicit descriptions of each baseline implementation (including code-level parameter choices and how they were adapted to the measured indoor scenario), report statistical significance via paired t-tests or Wilcoxon tests with p-values on the task-success, attempt-count, and failure-rate metrics, and state the fixed request-response window parameters derived from the measured uplink/downlink traces rather than tuned post-hoc. These additions will be placed before the result tables so readers can assess the comparisons directly. revision: yes
-
Referee: [Abstract] Abstract: the method treats an accurate communication map as given and selects the request point as a hard constraint inside the request-response window; no sensitivity analysis to spatial or temporal map error (or protocol for map acquisition) is provided, yet even modest RF-map inaccuracies would directly invalidate the assumed uplink/downlink quality at the chosen location and thereby undermine the reported reductions in request failures.
Authors: The concern is valid: the present manuscript assumes an externally supplied, accurate map and does not quantify sensitivity to map error. We will add a new subsection in Experiments that perturbs the measured map with spatially correlated Gaussian noise and temporally varying offsets at levels representative of practical RF mapping error, re-running the planner and reporting degradation in task success and failure rate. We will also include a short discussion of map-acquisition protocols (e.g., drive-by RSSI sampling or existing indoor RF-mapping services) that could supply the input map. These results will be presented alongside the original tables so the robustness claim can be evaluated. revision: yes
Circularity Check
No circularity; framework consumes external map and produces request locations without self-referential reduction
full rationale
The paper defines a request-response window from timing quantities (uplink, inference, downlink) and treats an externally supplied communication map as a hard constraint for selecting the next request point inside the current primitive's support. No equations, fitted parameters, or self-citations are presented that define the output location in terms of the same location or that rename a fitted quantity as a prediction. The experimental claim rests on measured scenarios but the method itself remains an input-output mapping whose correctness is independent of its own outputs. This is the normal non-circular case for a planning framework.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A communication map of sufficient spatial resolution is available before execution begins.
invented entities (1)
-
request-response window
no independent evidence
Reference graph
Works this paper leans on
-
[1]
RT-2: Vision- Language-Action Models Transfer Web Knowledge to Robotic Control,
B. Zitkovich, T. Yu, S. Xu, P. Xu, T. Xiao, F. Xia, J. Wu, P. Wohlhart, S. Welker, A. Wahid, Q. Vuong, V . Vanhoucke, H. Tran, R. Soricut, A. Singh, J. Singh, P. Sermanet, P. R. Sanketi, G. Salazar, M. S. Ryoo, K. Reymann, K. Rao, K. Pertsch, I. Mordatch, H. Michalewski, Y . Lu, S. Levine, L. Lee, T.-W. E. Lee, I. Leal, Y . Kuang, D. Kalashnikov, R. Julia...
2023
-
[2]
OpenVLA: An Open-Source Vision-Language-Action Model
M. Kim, K. Pertsch, S. Karamcheti, T. Xiao, A. Balakrishna, S. Nair, R. Rafailov, E. Foster, G. Lam, P. Sanketi, Q. Vuong, T. Kollar, B. Burchfiel, R. Tedrake, D. Sadigh, S. Levine, P. Liang, and C. Finn, “OpenVLA: An Open-Source Vision-Language-Action Model,”arXiv preprint arXiv:2406.09246, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[3]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
K. Black, N. Brown, D. Driess, A. Esmail, M. Equi, C. Finn, N. Fusai, L. Groom, K. Hausman, B. Ichter, S. Jakubczak, T. Jones, L. Ke, S. Levine, A. Li-Bell, M. Mothukuri, S. Nair, K. Pertsch, L. X. Shi, J. Tanner, Q. Vuong, A. Walling, H. Wang, and U. Zhilinsky, “π 0: A Vision-Language-Action Flow Model for General Robot Control,”arXiv preprint arXiv:2410...
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[4]
Robot Navigation via Foundation Language Models: A Review,
H. Pan, S. Huang, J. Yang, J. Mi, K. Li, X. You, P. Liang, J. Yang, Y . Liu, J. Zhang, M. Wang, J. Yang, X. Zhang, L. Zhao, M. Chen, J. Zhou, and X. Wei, “Robot Navigation via Foundation Language Models: A Review,”ACM Comput. Surv., vol. 58, no. 11, 2026
2026
-
[5]
Foundation models in robotics: Applications, challenges, and the future,
R. Firoozi, J. Tucker, S. Tian, A. Majumdar, J. Sun, W. Liu, Y . Zhu, S. Song, A. Kapoor, K. Hausman, B. Ichter, D. Driess, J. Wu, C. Lu, and M. Schwager, “Foundation models in robotics: Applications, challenges, and the future,”The International Journal of Robotics Research, vol. 44, no. 5, pp. 701–739, 2025
2025
-
[6]
A Review on Edge Large Language Models: Design, Execution, and Applications,
Y . Zheng, Y . Chen, B. Qian, X. Shi, Y . Shu, and J. Chen, “A Review on Edge Large Language Models: Design, Execution, and Applications,” ACM Comput. Surv., vol. 57, no. 8, Mar. 2025
2025
-
[7]
LM-Nav: Robotic Navigation with Large Pre-Trained Models of Language, Vision, and Action,
D. Shah, B. Osinski, B. Ichter, and S. Levine, “LM-Nav: Robotic Navigation with Large Pre-Trained Models of Language, Vision, and Action,” inProceedings of The 6th Annual Conference on Robot Learning (CoRL), 2022
2022
-
[8]
Code as Policies: Language Model Programs for Embod- ied Control,
J. Liang, W. Huang, F. Xia, P. Xu, K. Hausman, B. Ichter, P. Florence, and A. Zeng, “Code as Policies: Language Model Programs for Embod- ied Control,” inProceedings of 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 9493–9500
2023
-
[9]
Visual Language Maps for Robot Navigation,
C. Huang, O. Mees, A. Zeng, and W. Burgard, “Visual Language Maps for Robot Navigation,” inProceedings of 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 10 608– 10 615
2023
-
[10]
LiP-LLM: Integrating Linear Programming and Dependency Graph With Large Language Models for Multi-Robot Task Planning,
K. Obata, T. Aoki, T. Horii, T. Taniguchi, and T. Nagai, “LiP-LLM: Integrating Linear Programming and Dependency Graph With Large Language Models for Multi-Robot Task Planning,”IEEE Robotics and Automation Letters, vol. 10, no. 2, pp. 1122–1129, 2025
2025
-
[11]
Boosting Efficient Re- inforcement Learning for Vision-and-Language Navigation With Open- Sourced LLM,
J. Wang, T. Wang, W. Cai, L. Xu, and C. Sun, “Boosting Efficient Re- inforcement Learning for Vision-and-Language Navigation With Open- Sourced LLM,”IEEE Robotics and Automation Letters, vol. 10, no. 1, pp. 612–619, 2025
2025
-
[12]
Event-Driven Proactive Assistive Manip- ulation with Grounded Vision-Language Planning,
F. Liu, H. Su, H. Chi, R. Geng, C. Ren, X. Liu, Y . Xu, Y . Ohsita, and L. Zhang, “Event-Driven Proactive Assistive Manip- ulation with Grounded Vision-Language Planning,”arXiv preprint arXiv:2603.23950, 2026
-
[13]
J. Tang, Y . Sun, Y . Zhao, S. Yang, Y . Lin, Z. Zhang, J. Hou, Y . Lu, Z. Liu, and S. Han, “VLASH: Real-Time VLAs via Future-State-Aware Asynchronous Inference,”arXiv preprint arXiv:2512.01031, 2025
-
[14]
AsyncVLA: An Asynchronous VLA for Fast and Robust Navigation on the Edge,
N. Hirose, C. Glossop, D. Shah, and S. Levine, “AsyncVLA: An Asynchronous VLA for Fast and Robust Navigation on the Edge,”arXiv preprint arXiv:2602.13476, 2026
-
[15]
Speculative Pol- icy Orchestration: A Latency-Resilient Framework for Cloud-Robotic Manipulation,
C. Nguyen, S. Jin, F. T. Pokorny, and E. Elmroth, “Speculative Pol- icy Orchestration: A Latency-Resilient Framework for Cloud-Robotic Manipulation,”arXiv preprint arXiv:2603.19418, 2026
-
[16]
The Role of Mobile Communications for Industrial Automation: Architecture, Ap- plications and Challenges,
E. Zeydan, S. S. Arslan, Y . Turk, T. Hewa, and M. Liyanage, “The Role of Mobile Communications for Industrial Automation: Architecture, Ap- plications and Challenges,”IEEE Open Journal of the Communications Society, vol. 6, pp. 6808–6841, 2025
2025
-
[17]
FogROS2: 14 An Adaptive Platform for Cloud and Fog Robotics Using ROS 2,
J. Ichnowski, K. Chen, K. Dharmarajan, S. Adebola, M. Danielczuk, V . Mayoral-Vilches, N. Jha, H. Zhan, E. Llontop, D. Xu, C. Buscaron, J. Kubiatowicz, I. Stoica, J. Gonzalez, and K. Goldberg, “FogROS2: 14 An Adaptive Platform for Cloud and Fog Robotics Using ROS 2,” in Proceedings of 2023 IEEE International Conference on Robotics and Automation (ICRA), 2...
2023
-
[18]
FogROS2-LS: A Location- Independent Fog Robotics Framework for Latency Sensitive ROS2 Applications,
K. Chen, M. Wang, M. Gualtieri, N. Tian, C. Juette, L. Ren, J. Ich- nowski, J. Kubiatowicz, and K. Goldberg, “FogROS2-LS: A Location- Independent Fog Robotics Framework for Latency Sensitive ROS2 Applications,” inProceedings of 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 10 581–10 587
2024
-
[19]
FogROS2-FT: Fault Tolerant Cloud Robotics,
K. Chen, K. Hari, T. Chung, M. Wang, N. Tian, C. Juette, J. Ichnowski, L. Ren, J. Kubiatowicz, I. Stoica, and K. Goldberg, “FogROS2-FT: Fault Tolerant Cloud Robotics,” inProceedings of 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 1390–1397
2024
-
[20]
FogROS2-PLR: Probabilistic Latency-Reliability for Cloud Robotics,
K. Chen, N. Tian, C. Juette, T. Qiu, L. Ren, J. Kubiatowicz, and K. Goldberg, “FogROS2-PLR: Probabilistic Latency-Reliability for Cloud Robotics,” inProceedings of 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025, pp. 16 290–16 297
2025
-
[21]
Robust mobile robot path planning via llm-based dynamic waypoint generation,
M. T. Tariq, Y . Hussain, and C. Wang, “Robust mobile robot path planning via llm-based dynamic waypoint generation,”Expert Systems with Applications, vol. 282, p. 127600, 2025
2025
-
[22]
Large Language Models (LLMs) Inference Offloading and Resource Allocation in Cloud-Edge Computing: An Active Inference Approach,
Y . He, J. Fang, F. R. Yu, and V . C. Leung, “Large Language Models (LLMs) Inference Offloading and Resource Allocation in Cloud-Edge Computing: An Active Inference Approach,”IEEE Transactions on Mobile Computing, vol. 23, no. 12, pp. 11 253–11 264, 2024
2024
-
[23]
Z. Zheng, S. Tian, H. Cao, C. Li, J. Chen, M. Li, X. Sun, H. Zou, G. Luo, and X. Chen, “RAPID: Redundancy-Aware and Compatibility- Optimal Edge-Cloud Partitioned Inference for Diverse VLA Models,” arXiv preprint arXiv:2603.07949, 2026
-
[24]
Mobile Edge Intelligence for Large Language Models: A Contemporary Survey,
G. Qu, Q. Chen, W. Wei, Z. Lin, X. Chen, and K. Huang, “Mobile Edge Intelligence for Large Language Models: A Contemporary Survey,” IEEE Communications Surveys & Tutorials, vol. 27, no. 6, pp. 3820– 3860, 2025
2025
-
[25]
Local-Cloud Infer- ence Offloading for LLMs in Multi-Modal, Multi-Task, Multi-Dialogue Settings,
L. Yuan, D.-J. Han, S. Wang, and C. Brinton, “Local-Cloud Infer- ence Offloading for LLMs in Multi-Modal, Multi-Task, Multi-Dialogue Settings,” inProceedings of the Twenty-Sixth International Symposium on Theory, Algorithmic Foundations, and Protocol Design for Mobile Networks and Mobile Computing, 2025, p. 201–210
2025
-
[26]
MoE2: Optimizing Collaborative Inference for Edge Large Language Models,
L. Jin, Y . Zhang, Y . Li, S. Wang, H. H. Yang, J. Wu, and M. Zhang, “MoE2: Optimizing Collaborative Inference for Edge Large Language Models,”IEEE Transactions on Networking, vol. 34, pp. 4637–4651, 2026
2026
-
[27]
AsyncShield: A Plug-and-Play Edge Adapter for Asynchronous Cloud-based VLA Navigation
K. Yang, Z. Chu, Y . Guo, Z. Wang, S. Xie, Y . Shen, X. Wu, X. Li, and M. Xu, “AsyncShield: A Plug-and-Play Edge Adapter for Asynchronous Cloud-based VLA Navigation,”arXiv preprint arXiv:2604.24086, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[28]
Communication-Aware Motion Plan- ning in Mobile Networks,
A. Ghaffarkhah and Y . Mostofi, “Communication-Aware Motion Plan- ning in Mobile Networks,”IEEE Transactions on Automatic Control, vol. 56, no. 10, pp. 2478–2485, 2011
2011
-
[29]
Adaptive communication in multi-robot systems using directionality of signal strength,
S. Gil, S. Kumar, D. Katabi, and D. Rus, “Adaptive communication in multi-robot systems using directionality of signal strength,”The International Journal of Robotics Research, vol. 34, no. 7, pp. 946– 968, 2015
2015
-
[30]
Co-Optimization of Communication and Motion Planning of a Robotic Operation under Resource Constraints and in Fading Environments,
Y . Yan and Y . Mostofi, “Co-Optimization of Communication and Motion Planning of a Robotic Operation under Resource Constraints and in Fading Environments,”IEEE Transactions on Wireless Communications, vol. 12, no. 4, pp. 1562–1572, 2013
2013
-
[31]
Path Planning for a Connectivity Seeking Robot,
A. Muralidharan and Y . Mostofi, “Path Planning for a Connectivity Seeking Robot,” inProceedings of 2017 IEEE Globecom Workshops (GC Wkshps), 2017, pp. 1–6
2017
-
[32]
Motion-Communication Co- Optimization With Cooperative Load Transfer in Mobile Robotics: An Optimal Control Perspective,
U. Ali, H. Cai, Y . Mostofi, and Y . Wardi, “Motion-Communication Co- Optimization With Cooperative Load Transfer in Mobile Robotics: An Optimal Control Perspective,”IEEE Transactions on Control of Network Systems, vol. 6, no. 2, pp. 621–632, 2019
2019
-
[33]
Efficient base station connectivity area discovery,
J. N. Twigg, J. R. Fink, P. L. Yu, and B. M. Sadler, “Efficient base station connectivity area discovery,”The International Journal of Robotics Research, vol. 32, no. 12, pp. 1398–1410, 2013
2013
-
[34]
RCAMP: A resilient communication-aware motion planner for mobile robots with autonomous repair of wireless connectivity,
S. Caccamo, R. Parasuraman, L. Freda, M. Gianni, and P. ¨Ogren, “RCAMP: A resilient communication-aware motion planner for mobile robots with autonomous repair of wireless connectivity,” inProceedings of 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017, pp. 2010–2017
2017
-
[35]
Distributed Connectivity Control of Mobile Networks,
M. M. Zavlanos and G. J. Pappas, “Distributed Connectivity Control of Mobile Networks,”IEEE Transactions on Robotics, vol. 24, no. 6, pp. 1416–1428, 2008
2008
-
[36]
Connectivity-Aware UA V Path Planning with Aerial Coverage Maps,
H. Yang, J. Zhang, S. Song, and K. B. Lataief, “Connectivity-Aware UA V Path Planning with Aerial Coverage Maps,” inProceedings of 2019 IEEE Wireless Communications and Networking Conference (WCNC), 2019, pp. 1–6
2019
-
[37]
PropEM-L: Radio Propagation Environment Modeling and Learning for Communication-Aware Multi-Robot Exploration,
L. Clark, J. Edlund, M. Net, T. Vaquero, and A. akbar Agha- mohammadi, “PropEM-L: Radio Propagation Environment Modeling and Learning for Communication-Aware Multi-Robot Exploration,” in Proceedings of Robotics: Science and Systems, 2022
2022
-
[38]
Integrating On- line Learning and Connectivity Maintenance for Communication-Aware Multi-Robot Coordination,
Y . Yang, Y . Lyu, Y . Zhang, I. Gao, and W. Luo, “Integrating On- line Learning and Connectivity Maintenance for Communication-Aware Multi-Robot Coordination,” inProceedings of 2024 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS), 2024, pp. 5770–5776
2024
-
[39]
Distributed Intermittent Connectivity Control of Mobile Robot Networks,
Y . Kantaros and M. M. Zavlanos, “Distributed Intermittent Connectivity Control of Mobile Robot Networks,”IEEE Transactions on Automatic Control, vol. 62, no. 7, pp. 3109–3121, 2017
2017
-
[40]
Temporal Logic Task Plan- ning and Intermittent Connectivity Control of Mobile Robot Networks,
Y . Kantaros, M. Guo, and M. M. Zavlanos, “Temporal Logic Task Plan- ning and Intermittent Connectivity Control of Mobile Robot Networks,” IEEE Transactions on Automatic Control, vol. 64, no. 10, pp. 4105– 4120, 2019
2019
-
[41]
Edge Accelerated Robot Navigation With Collaborative Motion Planning,
G. Li, R. Han, S. Wang, F. Gao, Y . C. Eldar, and C. Xu, “Edge Accelerated Robot Navigation With Collaborative Motion Planning,” IEEE/ASME Transactions on Mechatronics, vol. 30, no. 2, pp. 1166– 1178, 2025
2025
-
[42]
Optimization of Mobile Robotic Relay Operation for Minimal Average Wait Time,
W. Hurst and Y . Mostofi, “Optimization of Mobile Robotic Relay Operation for Minimal Average Wait Time,”IEEE Transactions on Wireless Communications, vol. 22, no. 6, pp. 3733–3747, 2023
2023
-
[43]
CTMap: LLM-Enabled Connectivity-Aware Path Planning in Millimeter-Wave Digital Twin Networks,
M. S. Parwez, S. T. Srivillibhutturu, S. V . R. Kopparthi, A. Misba, D. Roy, H. Olufowobi, and C. Kim, “CTMap: LLM-Enabled Connectivity-Aware Path Planning in Millimeter-Wave Digital Twin Networks,”arXiv preprint arXiv:2601.00110, 2026
-
[44]
RF-Modulated Adaptive Communication Improves Multi-Agent Robotic Exploration,
L. Achey, B. Crockett, C. Heckman, and B. Hayes, “RF-Modulated Adaptive Communication Improves Multi-Agent Robotic Exploration,” arXiv preprint arXiv:2602.12074, 2026
-
[45]
Communication-Aware Map Compression for Online Path-Planning,
E. Psomiadis, D. Maity, and P. Tsiotras, “Communication-Aware Map Compression for Online Path-Planning,” inProceedings of 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 12 368–12 374
2024
-
[46]
Supplementary open dataset for WiFi indoor localization based on received signal strength,
J. Bi, Y . Wang, B. Yu, H. Cao, T. Shi, and L. Huang, “Supplementary open dataset for WiFi indoor localization based on received signal strength,”Satellite Navigation, vol. 3, no. 1, p. 25, 2022
2022
-
[47]
A Latency-Aware Framework for Visuomotor Policy Learning on Industrial Robots,
D. Ruan, S. Mozaffari, S. Adriaenssens, and A. Adel, “A Latency-Aware Framework for Visuomotor Policy Learning on Industrial Robots,”arXiv preprint arXiv:2602.14255, 2026
-
[48]
Ground Slow, Move Fast: A Dual-System Foundation Model for Generalizable Vision-Language Navigation,
M. Wei, C. Wan, J. Peng, X. Yu, Y . Yang, D. Feng, W. Cai, C. Zhu, T. Wang, J. Pang, and X. Liu, “Ground Slow, Move Fast: A Dual-System Foundation Model for Generalizable Vision-Language Navigation,” in Proceedings of The 14th International Conference on Learning Repre- sentations (ICLR), 2026
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.