TreeAgent: A Generalizable Multi-Agent Framework for Automated Bias Labeling in Forestry via Compiled Expert Rules and Vision-Language Models
Pith reviewed 2026-07-01 05:08 UTC · model grok-4.3
The pith
A multi-agent framework uses expert decision trees and vision-language models to automate bias labeling in forestry remote sensing at lower cost.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
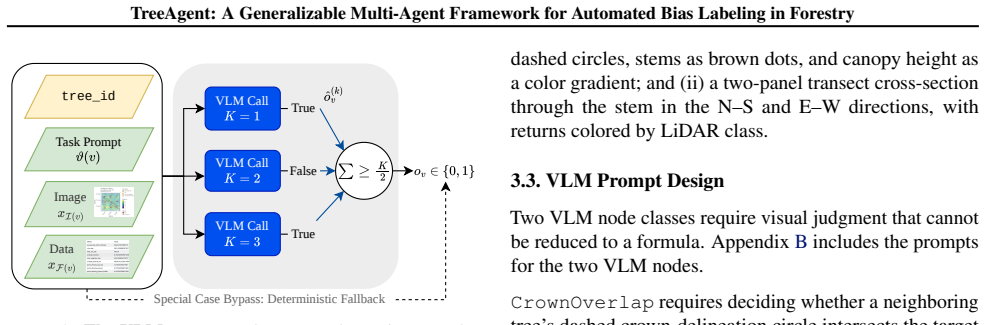
The central discovery is a Decoupled Declarative Decision Framework that orchestrates multiple agents, each guided by parts of an expert decision tree, to label data using VLMs for perception tasks. This allows the system to generalize to any expert-defined tree structure without changes to the code, outperforming supervised baselines and reducing expert effort needed for labeling in forestry applications.
What carries the argument
The Decoupled Declarative Decision (D3) Framework, which decouples the expert decision structure from the VLM perception and uses multi-agent voting for robustness.
If this is right
- Reproduces expert-defined labeling procedures at substantially lower annotation cost.
- Maintains interpretability by following the expert decision tree structure.
- Outperforms supervised ML baselines on the tree bias classification testbed.
- Supports zero-modification generalization across diverse expert-defined decision structures.
Where Pith is reading between the lines
- The method might apply to other fields that rely on decision trees for expert decisions, such as medical imaging or quality control.
- Reducing annotation costs could enable larger scale datasets for training remote sensing models in forestry.
- Multi-agent voting could be adapted to other stochastic AI systems to improve consistency without additional training.
Load-bearing premise
The expert decision trees capture the complete and accurate logic for the labeling task, and the vision-language models can correctly assess the semantic conditions at each node in the tree.
What would settle it
A direct test would be to apply the framework to a new forestry dataset with a different expert decision tree structure and measure whether the automated labels match independent expert annotations at the same rate as on the original testbed, without any framework modifications.
Figures

read the original abstract
Human-labeled data are widely used as reference annotations in ML, despite known variability across annotators in many expert-driven domains. In addition, expert annotation is slow, inconsistent, and remains a major bottleneck for scaling tasks like tree height bias classification in forestry remote sensing. We propose a multi-agent system (MAS) that orchestrates expert decision trees with Vision-Language Models (VLMs), treating the decision tree as a structural prior while VLMs perform localized semantic perception at individual nodes, with multi-agent voting to mitigate VLM stochasticity. We formalize a Decoupled Declarative Decision (D3) Framework that enables zero-modification generalization across diverse expert-defined decision structures. On a tree bias classification testbed, our framework outperforms supervised ML baselines and reduces the amount of expert labeling effort required. These results suggest that agentic orchestration of VLMs with expert priors can reproduce expert-defined labeling procedures at substantially lower annotation cost while maintaining interpretability.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes TreeAgent, a multi-agent system (MAS) that treats expert decision trees as structural priors, uses VLMs for localized semantic perception at individual nodes, and applies multi-agent voting to mitigate VLM stochasticity. It introduces a Decoupled Declarative Decision (D3) Framework for zero-modification generalization across expert-defined structures. The central empirical claim is that the framework outperforms supervised ML baselines on a tree bias classification testbed in forestry remote sensing while reducing expert labeling effort and preserving interpretability.
Significance. If the results hold, this could meaningfully advance automated labeling in expert domains with high annotation variability and cost, by providing an interpretable alternative to pure supervised learning through the orchestration of symbolic priors and VLMs. The D3 framework's emphasis on generalization without modification and the explicit use of compiled expert rules are strengths that could support broader adoption if validated.
major comments (2)
- [Abstract] Abstract: The claim that the framework 'outperforms supervised ML baselines and reduces the amount of expert labeling effort required' is presented without any reported metrics, baselines, dataset details, error bars, or experimental setup; this absence makes the central empirical contribution unverifiable and is load-bearing for the paper's main assertion.
- [Results] Results (implied by abstract claims): No tables, figures, or quantitative comparisons are referenced that would allow assessment of the outperformance or labeling reduction; without these, the testbed evaluation cannot be evaluated for soundness.
minor comments (1)
- [Abstract] Abstract: The acronym 'D3' and 'MAS' are introduced without expansion on first use, which reduces immediate clarity for readers unfamiliar with the terms.
Simulated Author's Rebuttal
We thank the referee for their careful review and constructive comments on the presentation of our empirical results. We address each major comment point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that the framework 'outperforms supervised ML baselines and reduces the amount of expert labeling effort required' is presented without any reported metrics, baselines, dataset details, error bars, or experimental setup; this absence makes the central empirical contribution unverifiable and is load-bearing for the paper's main assertion.
Authors: We agree that the abstract presents the central claim without quantitative support, which limits immediate verifiability. The full manuscript reports the experimental setup, dataset, metrics (with error bars), baselines, and labeling effort reduction in the Results section. We will revise the abstract to incorporate key quantitative highlights from those experiments, such as accuracy gains and labeling reduction percentages, to make the claim self-contained and verifiable at the abstract level. revision: yes
-
Referee: [Results] Results (implied by abstract claims): No tables, figures, or quantitative comparisons are referenced that would allow assessment of the outperformance or labeling reduction; without these, the testbed evaluation cannot be evaluated for soundness.
Authors: The manuscript contains tables and figures presenting the quantitative comparisons, metrics, and labeling effort analysis in the Results section. We acknowledge that the in-text references to these elements may not have been sufficiently explicit or repeated. We will revise the Results section to add clear, repeated citations (e.g., 'as shown in Table 1 and Figure 3') for all quantitative claims, ensuring the supporting evidence is immediately locatable. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper presents an engineering framework (expert decision trees as structural priors, VLMs for node-level perception, multi-agent voting, and D3 for generalization) whose central claims are supported by empirical results on a forestry testbed rather than by any derivation chain. No equations, fitted parameters renamed as predictions, self-definitional loops, or load-bearing self-citations appear in the abstract or described architecture. The method is self-contained against external benchmarks (supervised ML baselines) with no reduction of outputs to inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Vision-Language Models can perform localized semantic perception at individual nodes of expert decision trees
- domain assumption Multi-agent voting mitigates VLM stochasticity sufficiently for reliable labeling
Reference graph
Works this paper leans on
-
[1]
arXiv Preprint , year=
Integrating Expert Knowledge into Logical Programs via LLMs , author=. arXiv Preprint , year=
-
[2]
and Takashima, Yoshiki and Paulsen, Brandon and Dodds, Josiah and Kroening, Daniel , title=
Yang, Aidan Z.H. and Takashima, Yoshiki and Paulsen, Brandon and Dodds, Josiah and Kroening, Daniel , title=. 2024 , url=
2024
-
[3]
Debate or vote: Which yields better decisions in multi-agent large language models? , author=. arXiv preprint arXiv:2508.17536 , year=
-
[4]
2016 , doi=
Chen, Tianqi and Guestrin, Carlos , booktitle=. 2016 , doi=
2016
-
[5]
Ke, Guolin and Meng, Qi and Finley, Thomas and Wang, Taifeng and Chen, Wei and Ma, Weidong and Ye, Qiwei and Liu, Tie-Yan , booktitle=
-
[6]
Advances in Neural Information Processing Systems , volume=
Why do tree-based models still outperform deep learning on typical tabular data? , author=. Advances in Neural Information Processing Systems , volume=
-
[7]
Machine Learning , volume=
Random Forests , author=. Machine Learning , volume=. 2001 , doi=
2001
-
[8]
and Barnett, David T
Thorpe, Andrea S. and Barnett, David T. and Elmendorf, Sarah C. and Hinckley, Eve-Lyn S. and Hoekman, David and Jones, Katherine D. and LeVan, Katherine E. and Meier, Courtney L. and Stanish, Lee F. and Thibault, Katherine M. , journal=. Introduction to the sampling designs of the. 2016 , doi=
2016
-
[9]
Remote Sensing of Environment , volume=
The importance of spatial detail: Assessing the utility of individual crown information and scaling approaches for lidar-based biomass density estimation , author=. Remote Sensing of Environment , volume=. 2015 , doi=
2015
-
[10]
and Bahlai, Christie A
Pau, Stephanie and Dee, Laura E. and Bahlai, Christie A. and Fromm, Emma and Key, Kristina J. , journal=. Poor relationships between. 2022 , doi=
2022
-
[11]
Chawla, N. V. and Bowyer, K. W. and Hall, L. O. and Kegelmeyer, W. P. , journal=. 2002 , doi=
2002
-
[12]
Proceedings of the IEEE International Conference on Computer Vision (ICCV) , pages=
Focal Loss for Dense Object Detection , author=. Proceedings of the IEEE International Conference on Computer Vision (ICCV) , pages=. 2017 , doi=
2017
-
[13]
and Su, Hao and Mo, Kaichun and Guibas, Leonidas J
Qi, Charles R. and Su, Hao and Mo, Kaichun and Guibas, Leonidas J. , booktitle=. 2017 , doi=
2017
-
[14]
Nature , volume=
Accurate predictions on small data with a tabular foundation model , author=. Nature , volume=. 2025 , doi=
2025
-
[15]
Workshop on Challenges in Representation Learning, ICML , year=
Pseudo-Label: The Simple and Efficient Semi-Supervised Learning Method for Deep Neural Networks , author=. Workshop on Challenges in Representation Learning, ICML , year=
-
[16]
arXiv preprint arXiv:2505.14361 , year=
Vision-Language Modeling Meets Remote Sensing: Models, Datasets and Perspectives , author=. arXiv preprint arXiv:2505.14361 , year=
-
[17]
Advances in Neural Information Processing Systems , volume=
Chain-of-Thought Prompting Elicits Reasoning in Large Language Models , author=. Advances in Neural Information Processing Systems , volume=
-
[18]
Simulating the impacts of error in species and height upon tree volume derived from airborne laser scanning data , journal =. 2014 , issn =. doi:https://doi.org/10.1016/j.foreco.2014.05.011 , url =
-
[19]
and O'Sullivan, M
Friedlingstein, P. and O'Sullivan, M. and Jones, M. W. and others , TITLE =. Earth System Science Data , VOLUME =. 2025 , NUMBER =
2025
-
[20]
Is field-measured tree height as reliable as believed – A comparison study of tree height estimates from field measurement, airborne laser scanning and terrestrial laser scanning in a boreal forest , journal =. 2019 , issn =. doi:https://doi.org/10.1016/j.isprsjprs.2018.11.008 , url =
-
[21]
Terryn, Louise and Calders, Kim and Meunier, Félicien and Bauters, Marijn and Boeckx, Pascal and Brede, Benjamin and Burt, Andrew and Chave, Jerome and da Costa, Antonio Carlos Lola and D'hont, Barbara and Disney, Mathias and Jucker, Tommaso and Lau, Alvaro and Laurance, Susan G. W. and Maeda, Eduardo Eiji and Meir, Patrick and Krishna Moorthy, Sruthi M. ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.