NEUROSYMLAND: Neuro-Symbolic Landing-Site Assessment for Robust and Edge-Deployable UAV Autonomy
Pith reviewed 2026-07-03 11:17 UTC · model grok-4.3
The pith
NEUROSYMLAND combines visual perception with symbolic rules to assess UAV landing sites, succeeding in 61 of 72 simulated scenarios with low edge-hardware cost.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
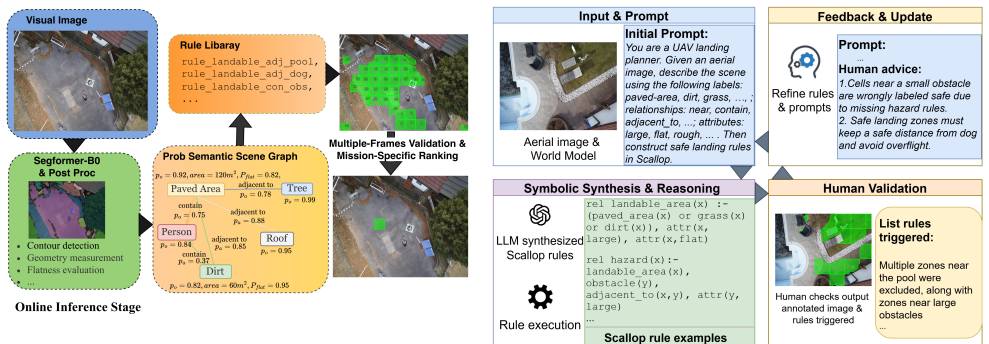
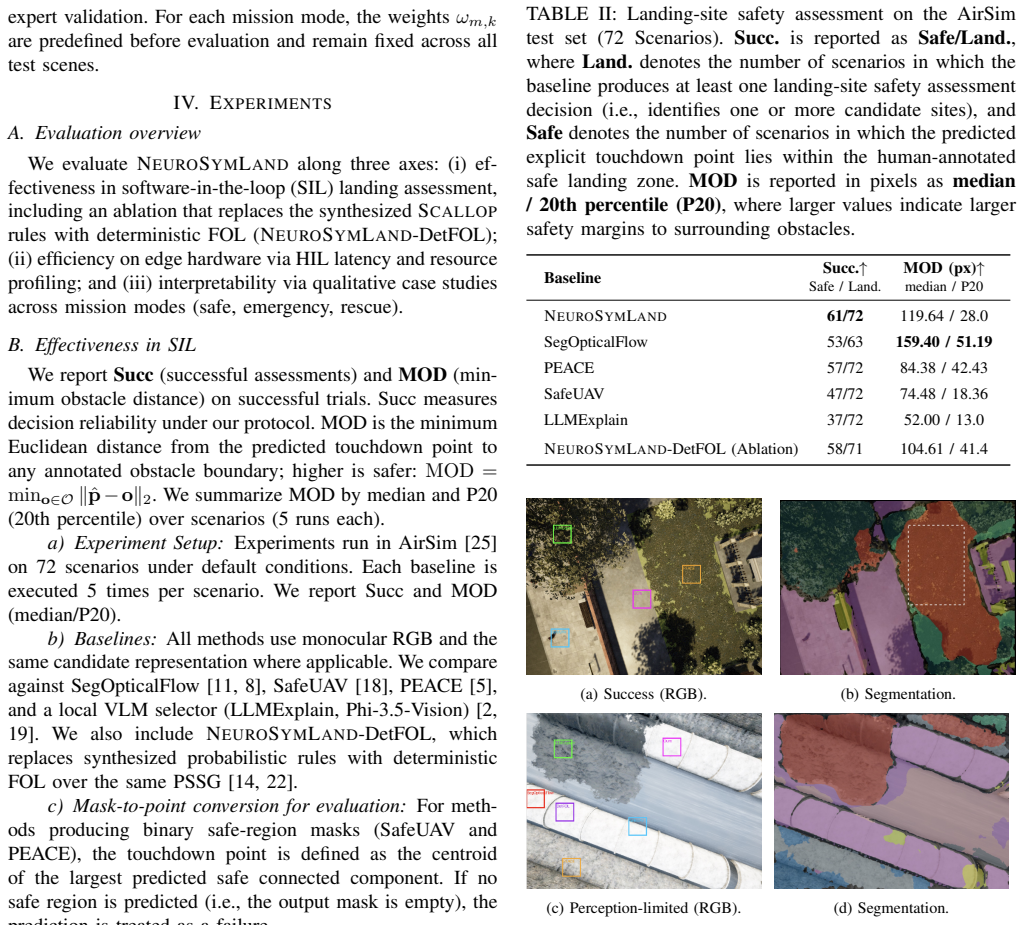
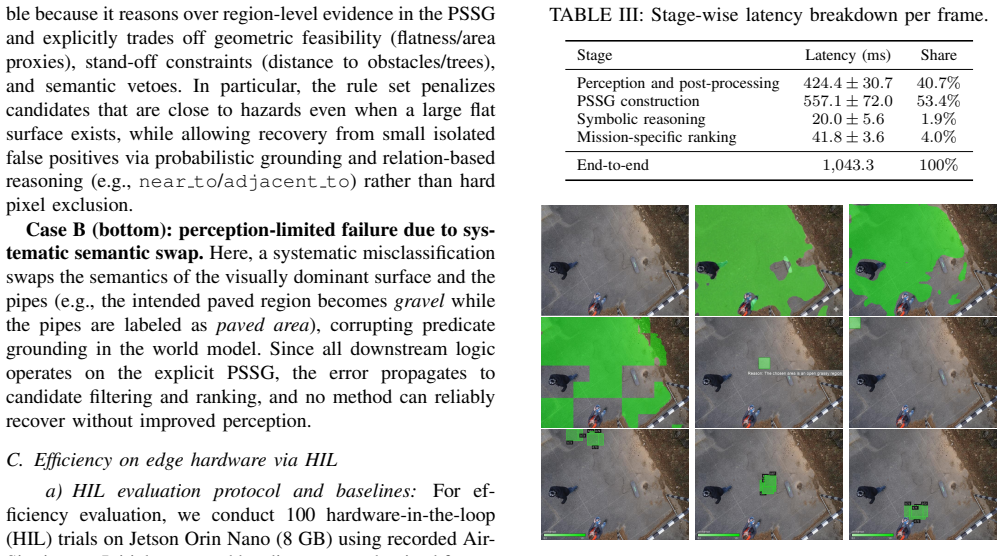
NEUROSYMLAND constructs a probabilistic semantic scene graph from onboard visual input and evaluates candidate landing regions using symbolic constraints that capture terrain flatness, obstacle clearance, and spatial consistency. This combination supports structured reasoning under perceptual uncertainty. Across 72 simulated landing scenarios the system records 61 successful assessments, exceeding the 37-57 range of four baselines, while 100 hardware-in-the-loop trials show that symbolic reasoning accounts for only a small fraction of end-to-end latency and that the full stack meets edge constraints on CPU, GPU, memory, and power.
What carries the argument
Probabilistic semantic scene graph evaluated by symbolic constraints on terrain flatness, obstacle clearance, and spatial consistency.
If this is right
- Achieves 61 successes out of 72 simulated scenarios, exceeding the range of four competitive baselines.
- Symbolic reasoning contributes only a small fraction of measured end-to-end latency.
- Perception and scene-graph construction remain the dominant computational costs.
- The complete assessment stack satisfies bounded CPU, GPU, memory, and power limits on edge hardware.
- The approach supplies both higher success counts and explicit interpretability of safety decisions.
Where Pith is reading between the lines
- The same graph-plus-constraint structure could be reused for other UAV tasks such as inspection or payload release by writing new symbolic rules.
- Real-flight data could be used to calibrate the probabilistic edge weights inside the scene graph and test whether simulated robustness carries over.
- Adding a feedback loop that updates constraint thresholds from past landings might reduce failures on terrain types absent from the original simulation set.
Load-bearing premise
The chosen symbolic constraints on terrain flatness, obstacle clearance, and spatial consistency together with the probabilistic scene graph are sufficient to indicate real-world landing safety under perceptual uncertainty.
What would settle it
Physical UAV flights in unstructured outdoor terrain where the system selects landing sites and independent ground-truth measurements determine whether the simulated success rate is preserved or drops because of factors the constraints do not model.
Figures

read the original abstract
Safe landing-site assessment in unstructured environments remains a key challenge for autonomous UAV deployment, as vision-only learning approaches often degrade under terrain variability and provide limited transparency in safety decisions. We present NEUROSYMLAND, a neuro-symbolic landing-site assessment system that integrates lightweight perception with explicit safety reasoning. The framework constructs a probabilistic semantic scene graph from onboard visual input and evaluates candidate landing regions using symbolic constraints capturing terrain flatness, obstacle clearance, and spatial consistency, enabling structured reasoning under perceptual uncertainty while maintaining edge-feasible execution. Across 72 simulated landing scenarios spanning diverse terrains, NEUROSYMLAND achieves 61 successful assessments, outperforming four competitive baselines (37-57 successes). To evaluate deployability, we further conduct 100 hardware-in-the-loop trials with randomized initial poses, profiling end-to-end latency, stage-wise execution time, and system-level metrics including CPU/GPU utilization, memory footprint, and power consumption. Results demonstrate improved robustness and interpretability with bounded edge-resource usage. Profiling shows that symbolic reasoning contributes only a small fraction of end-to-end latency, while the main computational cost arises from perception and PSSG construction. These results demonstrate the feasibility of deploying the landing-site assessment stack on edge-constrained UAV hardware, and all source code, datasets, prompts, and symbolic rule refinement examples are released in an open-source repository
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces NEUROSYMLAND, a neuro-symbolic UAV landing-site assessment framework that builds a probabilistic semantic scene graph from onboard vision and applies explicit symbolic constraints for terrain flatness, obstacle clearance, and spatial consistency. It claims 61 successful assessments out of 72 simulated scenarios across diverse terrains, outperforming four baselines (37-57 successes), plus 100 hardware-in-the-loop trials demonstrating edge deployability with low symbolic-reasoning latency; all code, datasets, and rules are released open-source.
Significance. If the symbolic constraints prove reliable under real perceptual uncertainty, the approach could advance interpretable and robust autonomy for edge UAVs in unstructured settings. The open-source release of code, datasets, prompts, and rule examples is a clear strength for reproducibility.
major comments (3)
- [Abstract / Results paragraph] Abstract / Results: the headline claim of 61 successful assessments (vs. 37-57 for baselines) supplies no definition of 'successful assessment', no statistical tests, no baseline implementation details, and no quantitative hardware metrics beyond qualitative profiling statements. This directly undermines the reported robustness margin.
- [Evaluation / Hardware-in-the-loop trials] Evaluation: the 72 simulated scenarios and 100 HIL trials provide only aggregate counts and latency profiles; no quantitative comparison to physical ground-truth safety labels, no sim-to-real transfer experiments, and no sensitivity analysis to sensor noise distributions outside the training simulator are referenced. The central assumption that the hand-specified constraints on flatness, clearance, and consistency (applied to the probabilistic scene graph) track actual landing safety therefore remains untested.
- [Methods / Symbolic constraints] Methods: the specific symbolic constraints and the construction of the probabilistic scene graph are described only at a high level; without the exact rule definitions or the mapping from perceptual uncertainty to assessment outputs, it is impossible to verify whether the reported success counts follow from the stated axioms or from post-hoc tuning.
minor comments (2)
- [Abstract / Profiling results] The abstract states that 'symbolic reasoning contributes only a small fraction of end-to-end latency' but reports no numerical breakdown of stage-wise times or utilization metrics; adding a table with these values would improve clarity.
- [Methods] Notation for the probabilistic scene graph (PSSG) and the exact form of the symbolic constraints is introduced without an accompanying equation or pseudocode block, making the neuro-symbolic integration harder to follow on first reading.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below, indicating where the manuscript will be revised for greater clarity and rigor.
read point-by-point responses
-
Referee: [Abstract / Results paragraph] Abstract / Results: the headline claim of 61 successful assessments (vs. 37-57 for baselines) supplies no definition of 'successful assessment', no statistical tests, no baseline implementation details, and no quantitative hardware metrics beyond qualitative profiling statements. This directly undermines the reported robustness margin.
Authors: We agree these details are required. In revision we will explicitly define a successful assessment as one in which the system correctly labels a candidate site safe or unsafe according to the simulator's ground-truth terrain properties (flatness, clearance, consistency). We will add statistical significance testing (e.g., McNemar's test) between NEUROSYMLAND and each baseline. Baseline implementations, including any hyperparameters and training details, will be expanded in the methods. Quantitative hardware metrics (exact mean and std latency in ms, CPU/GPU utilization percentages, memory footprint in MB, and power draw in W) will replace qualitative statements. revision: yes
-
Referee: [Evaluation / Hardware-in-the-loop trials] Evaluation: the 72 simulated scenarios and 100 HIL trials provide only aggregate counts and latency profiles; no quantitative comparison to physical ground-truth safety labels, no sim-to-real transfer experiments, and no sensitivity analysis to sensor noise distributions outside the training simulator are referenced. The central assumption that the hand-specified constraints on flatness, clearance, and consistency (applied to the probabilistic scene graph) track actual landing safety therefore remains untested.
Authors: The 72 scenarios use simulator-provided ground-truth safety labels; we will state this explicitly and report per-terrain breakdown. Physical real-world ground-truth labels are unavailable because the study is limited to simulation and HIL; this limitation and the proxy nature of the labels will be acknowledged. No dedicated sim-to-real transfer experiments were performed. Sensitivity to sensor noise is handled via the probabilistic scene graph, but we will add an explicit discussion of the noise distributions used in simulation and how constraint thresholds interact with them. The assumption is supported indirectly by consistent outperformance across diverse terrains and low symbolic latency in HIL. revision: partial
-
Referee: [Methods / Symbolic constraints] Methods: the specific symbolic constraints and the construction of the probabilistic scene graph are described only at a high level; without the exact rule definitions or the mapping from perceptual uncertainty to assessment outputs, it is impossible to verify whether the reported success counts follow from the stated axioms or from post-hoc tuning.
Authors: The exact rule definitions, PSSG construction procedure, and the mapping from perceptual probabilities to constraint satisfaction are released in the open-source repository. To make the paper self-contained we will add a dedicated subsection (or appendix) containing the precise symbolic rules (e.g., flatness: slope < 5° with probability > 0.8), pseudocode for the assessment pipeline, and the uncertainty propagation steps. This will demonstrate that the rules follow from domain safety requirements rather than post-hoc tuning. revision: yes
- New physical ground-truth safety labels and dedicated sim-to-real transfer experiments cannot be supplied without additional real-world data collection outside the scope of a revision.
Circularity Check
No circularity: empirical results from simulation and hardware trials
full rationale
The paper reports aggregate success counts (61/72 scenarios) and latency profiles from 72 simulated scenarios plus 100 hardware-in-the-loop trials. No equations, derivations, fitted parameters, or self-citations appear that reduce these counts to inputs by construction. Symbolic constraints on flatness, clearance and consistency are hand-specified and evaluated empirically against baselines; their sufficiency is not derived from prior self-work or renamed known results. The evaluation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Symbolic constraints on flatness, obstacle clearance and spatial consistency are sufficient to evaluate landing safety under uncertainty.
Reference graph
Works this paper leans on
-
[1]
Graz University of Technology (IGMS).Semantic Drone Dataset.https : / / www . tugraz . at / index.php?id=22387
-
[2]
Marah Abdin et al.Phi-3 Technical Report: A Highly Capable Language Model Locally on Your Phone
-
[3]
arXiv:2404.14219 [cs.CL]
work page internal anchor Pith review Pith/arXiv arXiv
-
[4]
RB-LLM Control: an Intelligent Control Framework with Rule-Based Large Language Model Decision-Making
Fateme Aghaee et al. “RB-LLM Control: an Intelligent Control Framework with Rule-Based Large Language Model Decision-Making”. In:Aerospace Science and Technology(2025)
2025
-
[5]
Robust and Efficient AI- Based Attack Recovery in Autonomous Drone
Diego Ortiz Barbosa et al. “Robust and Efficient AI- Based Attack Recovery in Autonomous Drone”. In: GENZERO workshop. Springer. 2024
2024
-
[6]
PEACE: Prompt Engineer- ing Automation for CLIPSeg Enhancement for Safe- Landing Zone Segmentation
Haechan Mark Bong et al. “PEACE: Prompt Engineer- ing Automation for CLIPSeg Enhancement for Safe- Landing Zone Segmentation”. In:IROS. 2025
2025
-
[7]
The OpenCV Library
G. Bradski. “The OpenCV Library”. In:Dr. Dobb’s Journal of Software Tools(2000)
2000
-
[8]
Landing Site De- tection for Autonomous Rotor Wing UA Vs Using Visual and Structural Information
Evangelos Chatzikalymnios et al. “Landing Site De- tection for Autonomous Rotor Wing UA Vs Using Visual and Structural Information”. In:JINT104.27 (2022).DOI:10.1007/s10846-021-01544-6
-
[9]
Evolution of Robust High- Speed Optical-Flow-Based Landing for Autonomous Micro Air Vehicles
Kirk Y .W. cheper et al. “Evolution of Robust High- Speed Optical-Flow-Based Landing for Autonomous Micro Air Vehicles”. In:Robotics and Autonomous Systems(2020)
2020
-
[10]
Automatic generation and detection of highly reliable fiducial markers under occlusion
S. Garrido-Jurado et al. “Automatic generation and detection of highly reliable fiducial markers under occlusion”. In:Pattern Recognition(2014)
2014
-
[11]
Free LSD: Prior-Free Visual Landing Site Detection for Autonomous Planes
Timo Hinzmann et al. “Free LSD: Prior-Free Visual Landing Site Detection for Autonomous Planes”. In: IEEE Robotics and Automation Letters(2018)
2018
-
[12]
Adaptive Gain Control Strategy for Constant Optical Flow Divergence Landing
H. W. Ho et al. “Adaptive Gain Control Strategy for Constant Optical Flow Divergence Landing”. In:IEEE Transactions on Robotics(2018)
2018
-
[13]
Scallop: From Probabilistic Deduc- tive Databases to Scalable Differentiable Reasoning
Jiani Huang et al. “Scallop: From Probabilistic Deduc- tive Databases to Scalable Differentiable Reasoning”. In:NeurIPS. 2021
2021
-
[14]
Large Language Models for UA Vs: Current State and Pathways to the Future
Shumaila Javaid et al. “Large Language Models for UA Vs: Current State and Pathways to the Future”. In: OJVT(2024)
2024
-
[15]
Vision-Guided Landing of an Autonomous Helicopter in Hazardous Terrain
Andrew Johnson et al. “Vision-Guided Landing of an Autonomous Helicopter in Hazardous Terrain”. In: ICRA. 2005
2005
-
[16]
Autonomous UA Vs landing site selec- tion from point cloud in unknown environments
Yang L et al. “Autonomous UA Vs landing site selec- tion from point cloud in unknown environments”. In: ISA Transactions(2022)
2022
-
[17]
Scallop: A Language for Neurosym- bolic Programming
Ziyang Li et al. “Scallop: A Language for Neurosym- bolic Programming”. In:PACMPL(June 2023)
2023
-
[18]
2021.DOI:10.48550/ arXiv.2111.00495
Yossi Magrisso et al.Local Trajectory Planning For UAV Autonomous Landing. 2021.DOI:10.48550/ arXiv.2111.00495
-
[19]
SafeUA V: Learning to estimate depth and safe landing areas for UA Vs from synthetic data
Alina Marcu et al. “SafeUA V: Learning to estimate depth and safe landing areas for UA Vs from synthetic data”. In:ECCV Workshops. 2018
2018
-
[20]
https : / / huggingface
Microsoft et al.Phi-3.5-Vision-Instruct Model Card. https : / / huggingface . co / microsoft / Phi-3.5-vision-instruct. Microsoft, 2024
2024
-
[21]
AprilTag: A robust and flexible visual fiducial system
Edwin Olson. “AprilTag: A robust and flexible visual fiducial system”. In:ICRA. 2011
2011
-
[22]
com / index / introducing-o3-and-o4-mini/
OpenAI.Introducing OpenAI o3 and o4- mini.https : / / openai . com / index / introducing-o3-and-o4-mini/. 2025
2025
-
[23]
Visually-Guided Landing of an Unmanned Aerial Vehicle
Srikanth Saripalli et al. “Visually-Guided Landing of an Unmanned Aerial Vehicle”. In:IEEE Transactions on Robotics and Automation(2003)
2003
-
[24]
Multi-resolution elevation mapping and safe landing site detection with applica- tions to planetary rotorcraft
Pascal Schoppmann et al. “Multi-resolution elevation mapping and safe landing site detection with applica- tions to planetary rotorcraft”. In:IROS. IEEE. 2021
2021
-
[25]
Visual Environment Assess- ment for Safe Autonomous Quadrotor Landing
Mattia Secchiero et al. “Visual Environment Assess- ment for Safe Autonomous Quadrotor Landing”. In: ICUAS. 2024
2024
-
[26]
Airsim: High-fidelity visual and physical simulation for autonomous vehicles
Shital Shah et al. “Airsim: High-fidelity visual and physical simulation for autonomous vehicles”. In: Field and Service Robotics: Results of the 11th In- ternational Conference. Springer. 2018
2018
-
[27]
VisLanding: Monocular 3D Per- ception for UA V Safe Landing via Depth-Normal Synergy
Zhuoyue Tan et al. “VisLanding: Monocular 3D Per- ception for UA V Safe Landing via Depth-Normal Synergy”. In:IROS. 2025
2025
-
[28]
AprilTag 2: Efficient and robust fiducial detection
John Wang et al. “AprilTag 2: Efficient and robust fiducial detection”. In:IROS. 2016
2016
-
[29]
A semantic SLAM-based method for navigation and landing of UA Vs in indoor envi- ronments
Linjie Yang et al. “A semantic SLAM-based method for navigation and landing of UA Vs in indoor envi- ronments”. In:Knowledge-Based Systems(2024)
2024
-
[30]
An optimization-based selection approach of landing sites for swarm unmanned aerial vehicles in unknown environments
Linjie Yang et al. “An optimization-based selection approach of landing sites for swarm unmanned aerial vehicles in unknown environments”. In:Expert Sys- tems with Applications204 (2022)
2022
-
[31]
A Study for UA V Autonomous Safe Landing-Site Selection on Rough Terrain
Wenlong Zheng et al. “A Study for UA V Autonomous Safe Landing-Site Selection on Rough Terrain”. In: CONF-CDS 2021: The 2nd International Conference on Computing and Data Science. ACM, 2021.DOI: 10.1145/3448734.3450884
-
[32]
NeuroStrata: Harnessing Neuro- Symbolic Paradigms for Improved Testability and Verifiability of Autonomous CPS
Xi Zheng et al. “NeuroStrata: Harnessing Neuro- Symbolic Paradigms for Improved Testability and Verifiability of Autonomous CPS”. In:FSE. 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.