Sensing Volume Coverage of Robot Workspace using On-Robot Time-of-Flight Sensor Arrays for Safe Human Robot Interaction
Pith reviewed 2026-05-25 09:49 UTC · model grok-4.3
The pith
Octree volumetry quantifies how ToF sensor arrays cover robot workspaces for human safety.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
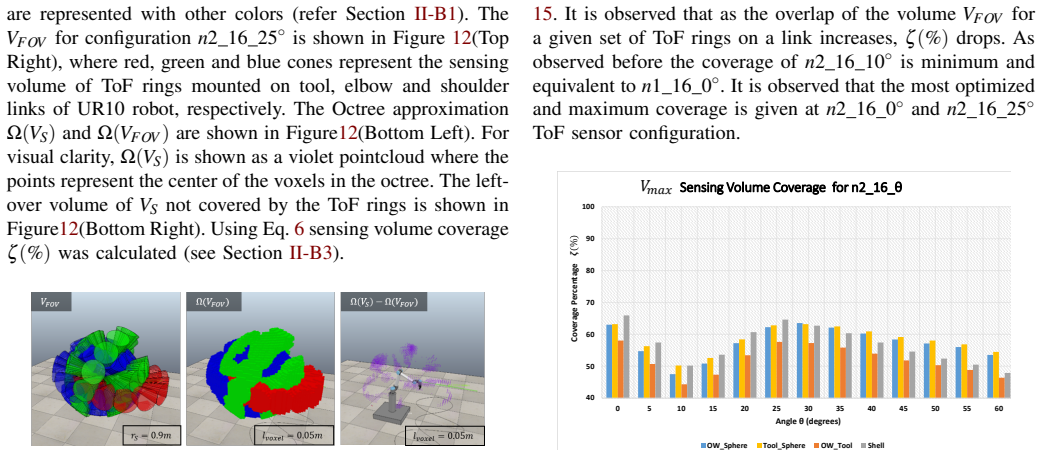
A methodology using octrees measures the detection volume of Time-of-Flight sensor array rings mounted on robot links; increasing sensors per ring and adding more rings raises the fraction of a defined maximum ideal volume that is sensed, with tabulated results separating close-zone and far-zone coverage for safe human-robot interaction.
What carries the argument
Octree volumetry, which discretizes the workspace into voxels and tallies those intersected by sensor rays for each array configuration.
If this is right
- Adding sensors per ring or adding rings increases the sensed fraction of the ideal volume.
- Close zones near the robot receive higher coverage than distant zones for the tested placements.
- Ring placement and orientation on specific links determine the overall sensing pattern.
- The tabulated coverage values supply concrete data for choosing array setups that meet safety requirements.
Where Pith is reading between the lines
- Designers could use these coverage numbers to pick sensor counts before building hardware.
- The same octree approach might extend to moving robots by updating the model at each pose.
- Uncovered voxels identified by the method could trigger added sensors or slower robot speeds.
Load-bearing premise
The octree grid accurately captures real sensor detection volumes even though reflections, occlusions, and noise are ignored.
What would settle it
Place physical ToF sensors on a robot arm in one of the tested ring configurations and measure the actual detected volume against the octree prediction inside the same maximum ideal volume.
Figures







read the original abstract
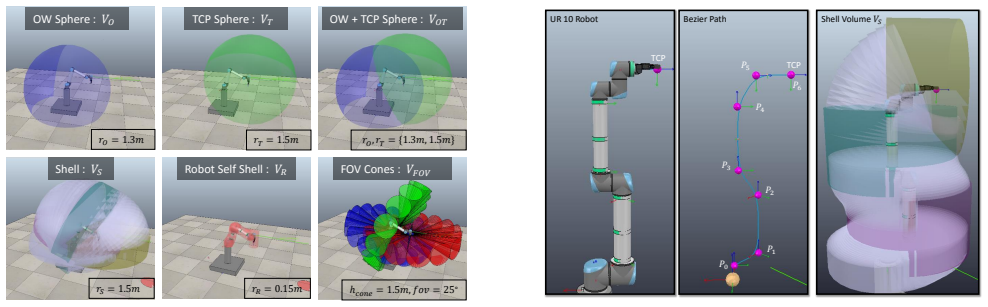
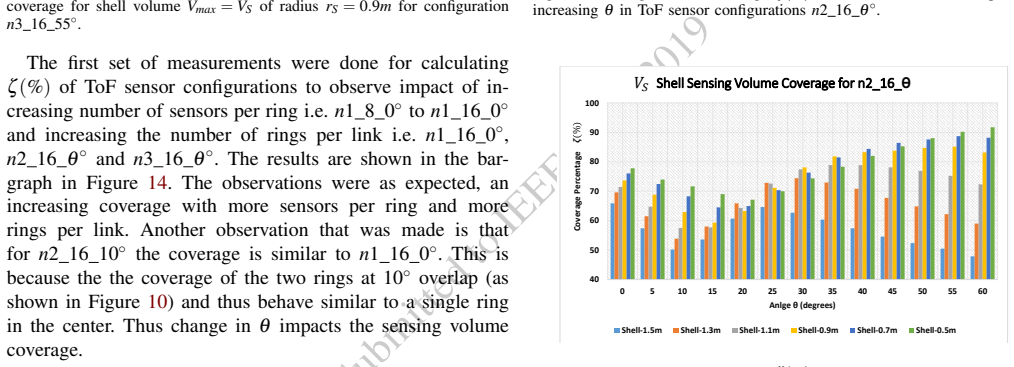
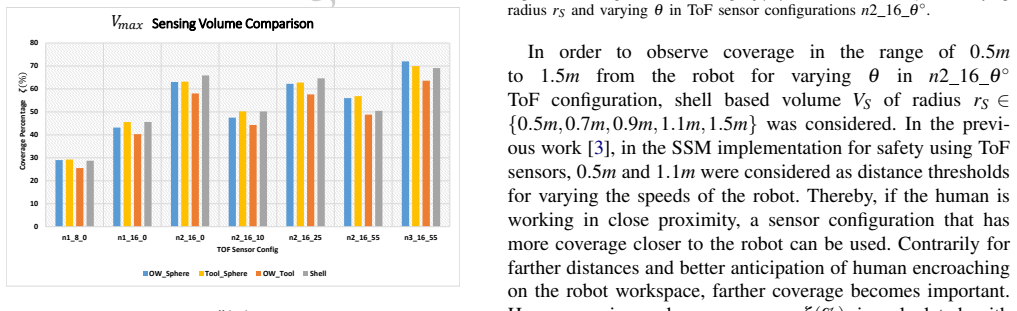
In this paper, an analysis of the sensing volume coverage of robot workspace as well as the shared human-robot collaborative workspace for various configurations of on-robot Time-of-Flight (ToF) sensor array rings is presented. A methodology for volumetry using octrees to quantify the detection/sensing volume of the sensors is proposed. The change in sensing volume coverage by increasing the number of sensors per ToF sensor array ring and also increasing the number of rings mounted on robot link is also studied. Considerations of maximum ideal volume around the robot workspace that a given ToF sensor array ring placement and orientation setup should cover for safe human robot interaction are presented. The sensing volume coverage measurements in this maximum ideal volume are tabulated and observations on various ToF configurations and their coverage for close and far zones of the robot are determined.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an octree-based volumetry methodology to quantify the sensing volume coverage of on-robot ToF sensor array rings for safe human-robot interaction. It examines how coverage changes with more sensors per ring and additional rings, defines a maximum ideal volume around the robot workspace, tabulates coverage percentages for various configurations, and reports observations distinguishing close and far zones.
Significance. If the idealized simulation results prove representative of physical sensor behavior, the tabulated coverage metrics could support systematic design of sensor placements to improve HRI safety. The octree approach offers a computationally tractable way to compare configurations, but its value for safety-critical applications depends on demonstrated correlation with real ToF performance.
major comments (2)
- [Methodology and results sections (octree volumetry and tabulated measurements)] The volumetry method models each ToF sensor as an idealized conical frustum with sharp cutoffs and performs ray-casting into the octree of the maximum ideal volume. This assumption omits reflections, multipath, ambient-light effects, sensor noise, and robot-link occlusions; because the safety argument equates simulated volume fraction with guaranteed detection, the tabulated coverage percentages (especially in the close zone) lack error bounds or sensitivity analysis and cannot be directly used to support the HRI safety claims.
- [Abstract and experimental/results sections] No validation against ground-truth sensor data, physical prototypes, or alternative simulation models (e.g., with noise or occlusion) is described. The abstract states that measurements were tabulated and observations determined, yet the absence of such validation makes the central claim that the configurations improve safety untestable from the presented evidence.
minor comments (2)
- Provide the exact numerical definition, dimensions, and justification for the 'maximum ideal volume' used as the reference domain.
- Specify the octree resolution, ray-casting parameters, and any discretization thresholds so that the tabulated coverage values can be reproduced.
Simulated Author's Rebuttal
Thank you for the referee's comments. We address each major point below, clarifying the scope of the idealized octree-based simulation while agreeing on the need for better contextualization of limitations.
read point-by-point responses
-
Referee: The volumetry method models each ToF sensor as an idealized conical frustum with sharp cutoffs and performs ray-casting into the octree of the maximum ideal volume. This assumption omits reflections, multipath, ambient-light effects, sensor noise, and robot-link occlusions; because the safety argument equates simulated volume fraction with guaranteed detection, the tabulated coverage percentages (especially in the close zone) lack error bounds or sensitivity analysis and cannot be directly used to support the HRI safety claims.
Authors: The manuscript explicitly uses idealized conical frustum models for each sensor and ray-casting within the octree representation of the maximum ideal volume, as described in the methodology. This is a deliberate simplification to enable tractable comparison of configurations. The tabulated percentages are presented as relative coverage metrics for design exploration rather than absolute guarantees of detection. We agree that the idealized assumptions limit direct applicability to safety claims without further analysis. We will revise the discussion and conclusions to add explicit statements on these modeling choices, note the absence of error bounds or sensitivity analysis, and qualify that real-world effects must be considered for safety-critical applications. revision: partial
-
Referee: No validation against ground-truth sensor data, physical prototypes, or alternative simulation models (e.g., with noise or occlusion) is described. The abstract states that measurements were tabulated and observations determined, yet the absence of such validation makes the central claim that the configurations improve safety untestable from the presented evidence.
Authors: The paper focuses on the proposed octree volumetry methodology and reports simulation results for multiple configurations, with the abstract accurately describing the tabulation of those simulation measurements and the resulting observations. No physical validation or noisy/occluded simulations are included, as the contribution centers on the idealized comparative approach. We acknowledge this limits the strength of any safety-improvement implications. We will revise the manuscript to add a dedicated limitations paragraph clarifying the simulation-only nature of the evidence and stating that empirical validation against real ToF data is needed to support safety claims. revision: partial
Circularity Check
No circularity: forward simulation methodology with tabulated outputs from octree volumetry.
full rationale
The paper proposes an octree-based volumetry method to compute sensing volumes for ToF sensor arrays and reports tabulated coverage percentages obtained by applying that method to idealized sensor models in a defined maximum ideal volume. No equations, fitted parameters, or self-citations are invoked to derive the coverage numbers; the results are direct outputs of the described ray-casting procedure. None of the six enumerated circularity patterns apply: there is no self-definition of quantities, no renaming of known results as new predictions, and no load-bearing uniqueness theorem imported from prior author work. The derivation chain is self-contained as a simulation study whose validity rests on the modeling assumptions rather than on any reduction to its own inputs.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
A methodology for volumetry using octrees to quantify the detection/sensing volume of the sensors is proposed... ζ (%) = Λ(Ω(Vmax) ∩ Ω(VFOV)) / Λ(Ω(Vmax)) × 100
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
B. Siciliano and O. Khatib, Springer handbook of robotics . Springer, 2016
work page 2016
-
[2]
Dynamic Awareness of an Industrial Robotic Arm Using Time-of-Flight Laser-Ranging Sensors,
S. Kumar, C. Savur, and F. Sahin, “Dynamic Awareness of an Industrial Robotic Arm Using Time-of-Flight Laser-Ranging Sensors,” in 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Oct. 2018, pp. 2850–2857
work page 2018
-
[3]
Speed and Separation Monitoring using on-robot Time--of--Flight laser--ranging sensor arrays
S. Kumar, S. Arora, and F. Sahin, “Speed and separation mon- itoring using on-robot time–of–flight laser–ranging sensor arrays.” arXiv:1904.07379v1, Apr. 2019
work page internal anchor Pith review Pith/arXiv arXiv 1904
-
[4]
ISO/TS 15066:2016 - robots and robotic devices – collaborative robots
ISO, “ISO/TS 15066:2016 - robots and robotic devices – collaborative robots.” [Online]. Available: http://www.iso.org/
work page 2016
-
[5]
Rapid octree construction from image sequences,
R. Szeliski, “Rapid octree construction from image sequences,” CVGIP: Image understanding, vol. 58, no. 1, pp. 23–32, 1993
work page 1993
-
[6]
Minimum distance calculation using laser scanner and IMUs for safe human-robot interaction,
M. Safeea and P. Neto, “Minimum distance calculation using laser scanner and IMUs for safe human-robot interaction,” Robotics and Computer-Integrated Manufacturing, vol. 58, pp. 33–42, Aug. 2019
work page 2019
-
[7]
F. Flacco, T. Krger, A. D. Luca, and O. Khatib, “A Depth Space Approach for Evaluating Distance to Objects - with Application to Human-Robot Collision Avoidance,” Journal of Intelligent and Robotic Systems, vol. 80, pp. 7–22, 2015
work page 2015
-
[8]
Performance Metrics of Speed and Separation Monitoring in Shared Workspaces,
J. A. Marvel, “Performance Metrics of Speed and Separation Monitoring in Shared Workspaces,” IEEE Transactions on Automation Science and Engineering, vol. 10, pp. 405–414, 2013
work page 2013
-
[9]
Vir- tual whiskers Highly responsive robot collision avoidance,
T. Schlegl, T. Krger, A. Gaschler, O. Khatib, and H. Zangl, “Vir- tual whiskers Highly responsive robot collision avoidance,” in 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems , Nov. 2013, pp. 5373–5379
work page 2013
-
[10]
Optimal placement of spots in distributed proximity sensors for safe human-robot interaction,
N. M. Ceriani, G. B. Avanzini, A. M. Zanchettin, L. Bascetta, and P. Rocco, “Optimal placement of spots in distributed proximity sensors for safe human-robot interaction,” in 2013 IEEE International Confer- ence on Robotics and Automation , May 2013, pp. 5858–5863
work page 2013
-
[11]
Kinetostatic danger field - a novel safety as- sessment for human-robot interaction,
B. Lacevic and P. Rocco, “Kinetostatic danger field - a novel safety as- sessment for human-robot interaction,” in 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems , Oct. 2010, pp. 2169– 2174
work page 2010
-
[12]
Reactive task adaptation based on hierarchical constraints classification for safe industrial robots,
N. M. Ceriani, A. M. Zanchettin, P. Rocco, A. Stolt, and A. Robertsson, “Reactive task adaptation based on hierarchical constraints classification for safe industrial robots,” IEEE/ASME Transactions on Mechatronics , vol. 20, no. 6, pp. 2935–2949, Dec 2015
work page 2015
-
[13]
M. J. Rosenstrauch and J. Krger, “Safe human robot collaboration oper- ation area segmentation for dynamic adjustable distance monitoring,” in 2018 4th International Conference on Control, Automation and Robotics (ICCAR), April 2018, pp. 17–21
work page 2018
-
[14]
Implementing speed and separation monitoring in collaborative robot workcells,
J. A. Marvel and R. Norcross, “Implementing speed and separation monitoring in collaborative robot workcells,” Robotics and Computer- Integrated Manufacturing, vol. 44, pp. 144–155, Apr. 2017
work page 2017
-
[15]
V-REP: A versatile and scalable robot simulation framework,
E. Rohmer, S. P. N. Singh, and M. Freese, “V-REP: A versatile and scalable robot simulation framework,” in 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems , Nov. 2013, pp. 1321– 1326
work page 2013
-
[16]
Curve fitting with bezier cubics,
L. Shao and H. Zhou, “Curve fitting with bezier cubics,” Graphical models and image processing , vol. 58, no. 3, pp. 223–232, 1996
work page 1996
-
[17]
T. Huckaby, “Curved axis revolutions,” 05 2013. [On- line]. Available: https://www.researchgate.net/publication/264309866 Curved Axis Revolutions
-
[18]
Generalizations of the theorems of pappus,
A. W. Goodman and G. Goodman, “Generalizations of the theorems of pappus,” The American Mathematical Monthly , vol. 76, no. 4, pp. 355–366, 1969. [Online]. Available: http://www.jstor.org/stable/2316426
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.