Development of a General Momentum Exchange Devices Fault Model for Spacecraft Fault-Tolerant Control System Design
Pith reviewed 2026-05-24 21:11 UTC · model grok-4.3
The pith
A general cascade multiplicative fault model is established for momentum exchange devices in spacecraft.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
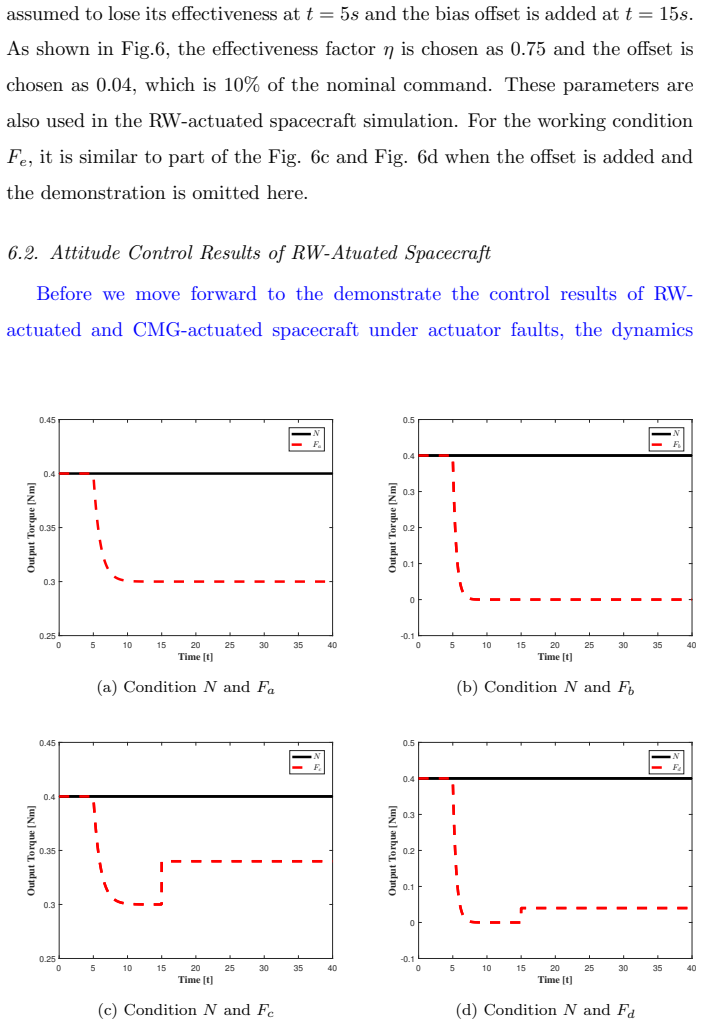
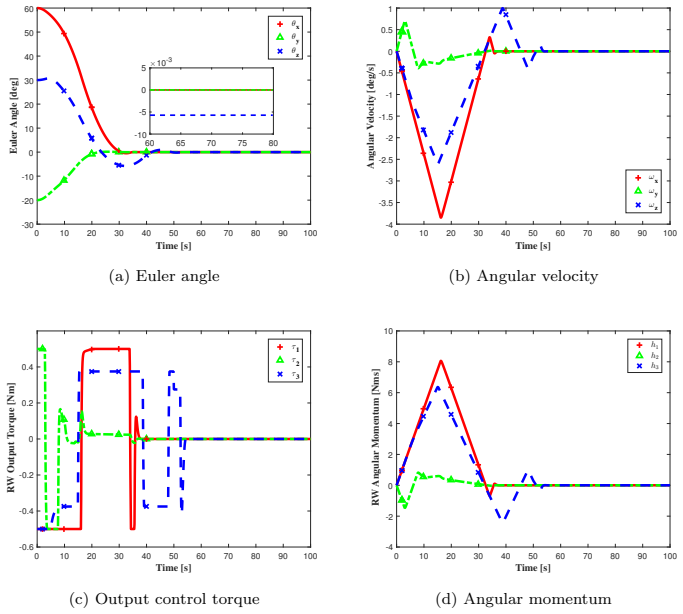
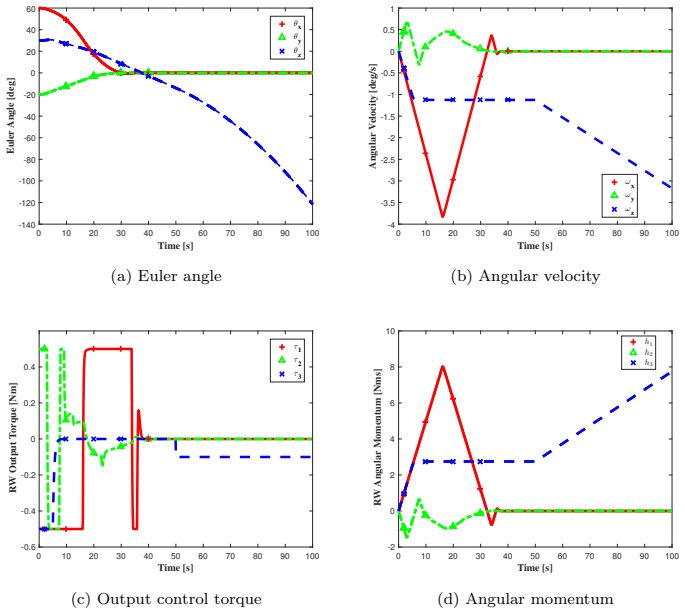
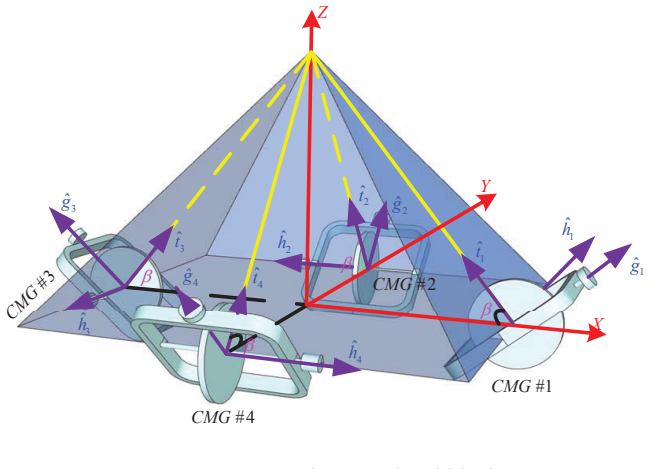
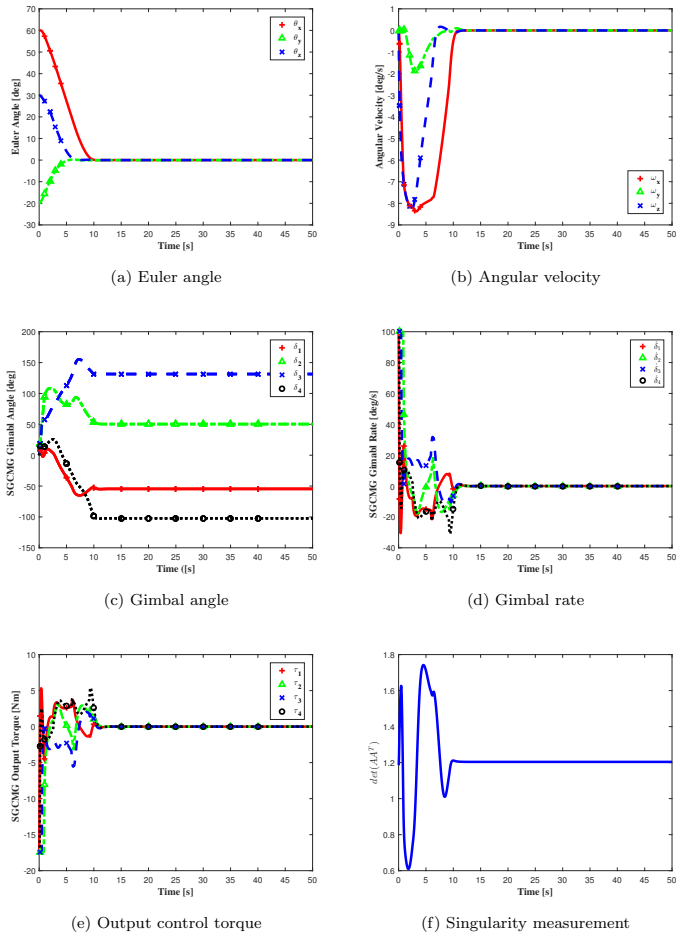
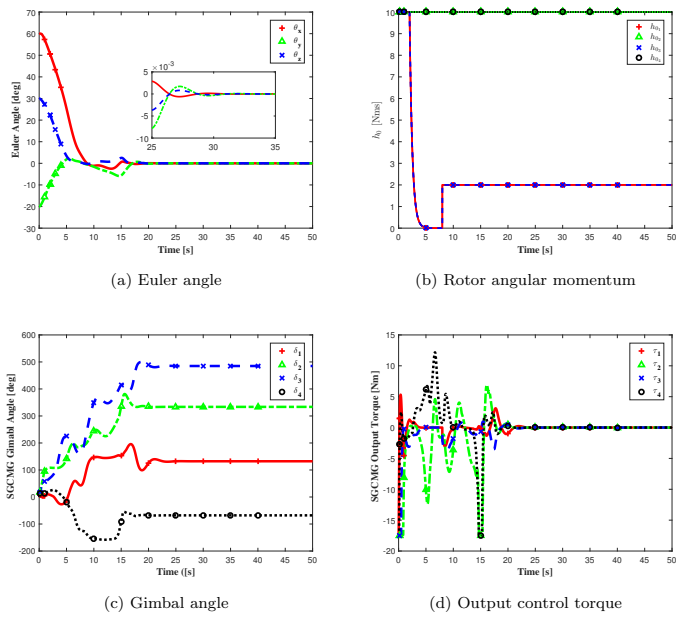
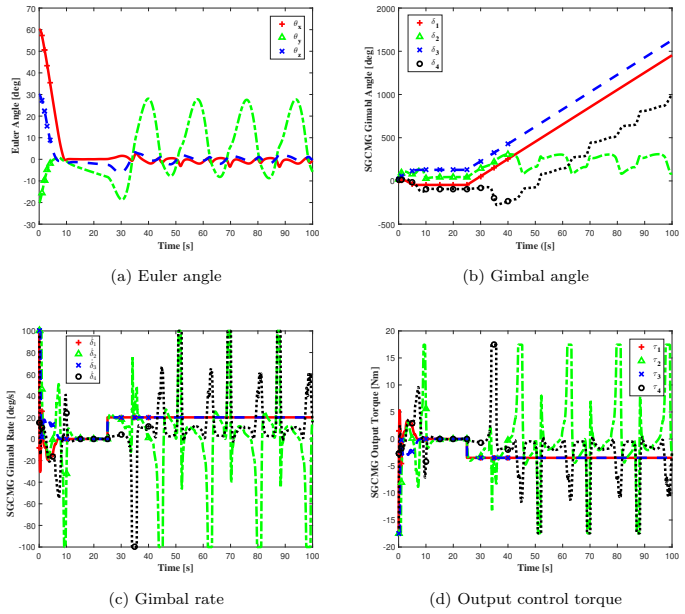
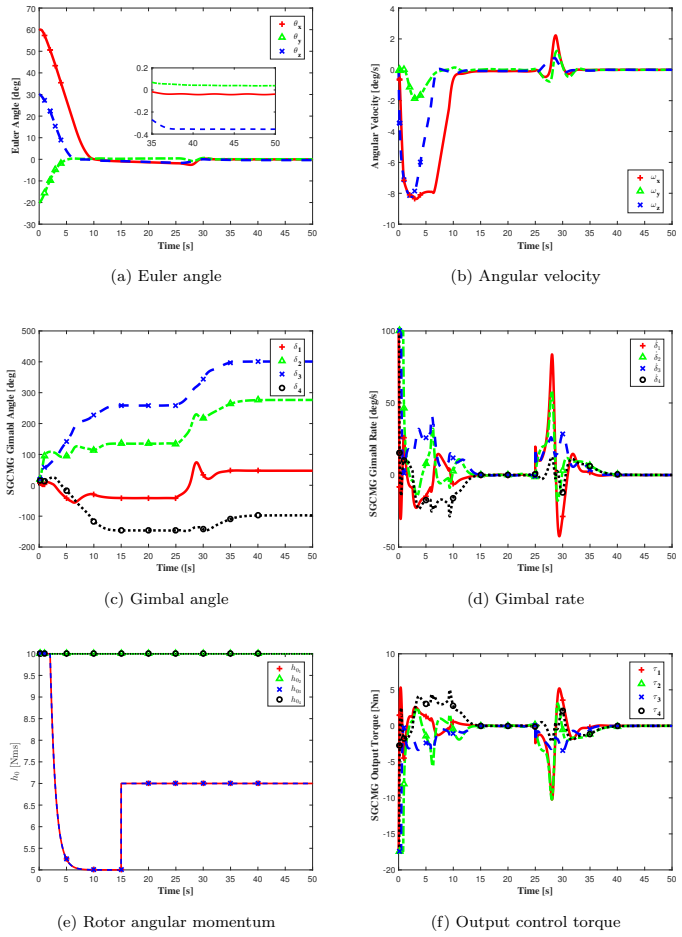
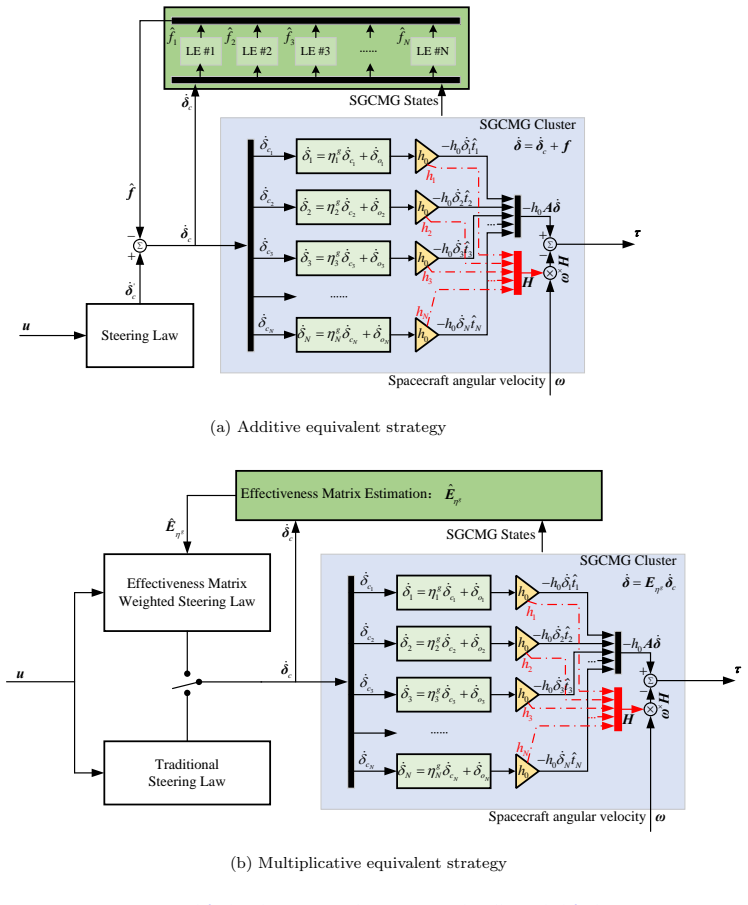
The authors model momentum exchange devices as a cascade electric motor-variable speed drive system. Potential faults in the mechanical parts are reviewed and summarized, leading to a general fault model in a cascade multiplicative structure. Six types of working conditions are identified and corresponding fault models constructed. Control responses are demonstrated for reaction wheels and single gimbal control moment gyros under the modeled faults, showing that additive faults are more serious than multiplicative faults from the viewpoint of control accuracy. Existing fault-tolerant control strategies are briefly summarized and potential passive and active approaches for gimbal fault are示范.
What carries the argument
Cascade multiplicative structure fault model built from summarized mechanical faults in the EM-VSD system.
If this is right
- Various fault scenarios can be simulated and their outputs visualized using the general model.
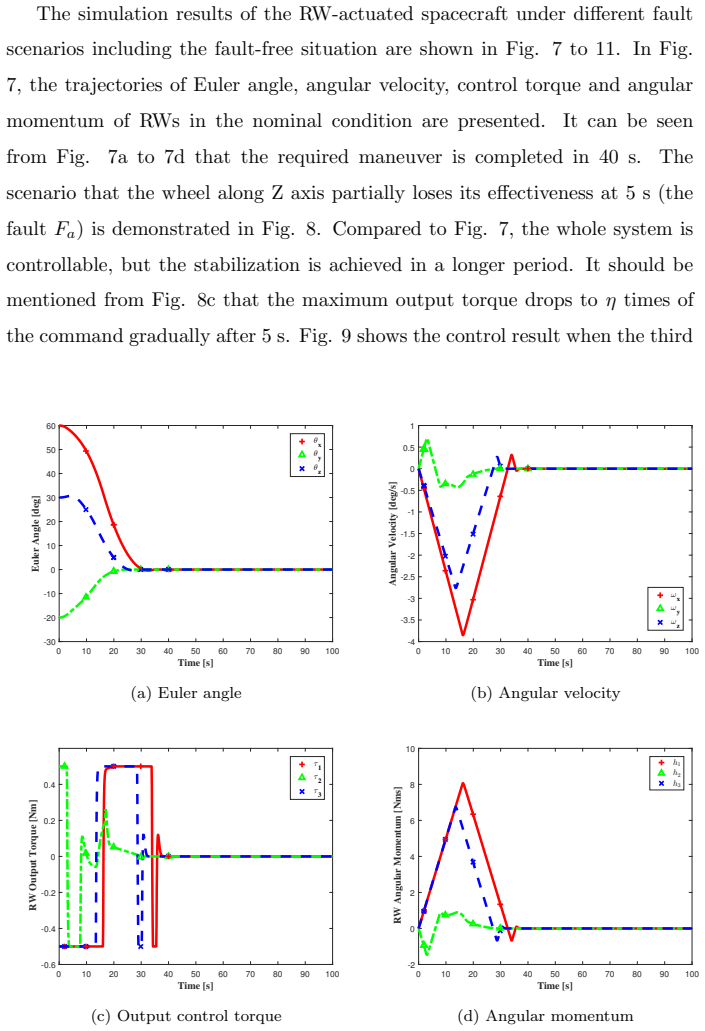
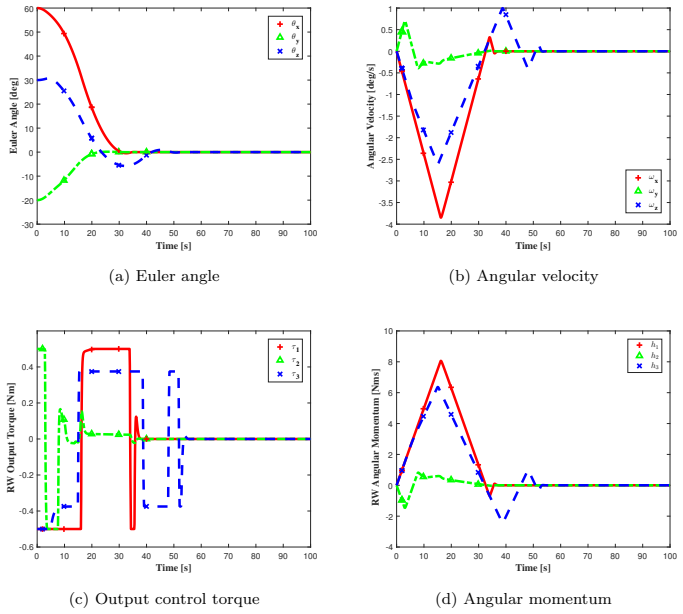
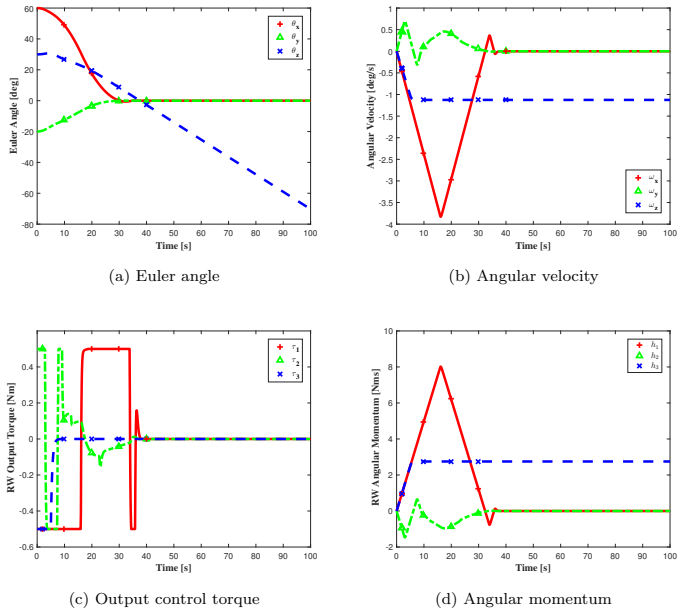
- Control responses of reaction wheels and single gimbal control moment gyros can be demonstrated under the six modeled conditions.
- Additive faults are shown to affect control accuracy more severely than multiplicative faults.
- The model supports brief summary of existing fault-tolerant strategies and demonstration of approaches for gimbal faults.
Where Pith is reading between the lines
- The multiplicative cascade form may allow easier integration into existing attitude control software for real-time fault accommodation.
- Extension to include sensor or electrical faults could be tested by adding further multiplicative stages.
- Hardware validation on a reaction wheel testbed would directly check whether the six conditions match physical failure modes.
Load-bearing premise
That reviewing and summarizing potential faults in the mechanical part of the EM and VSD system provides a sufficiently complete basis for a general multiplicative cascade model that covers all relevant fault behaviors.
What would settle it
Direct comparison of model-generated outputs against recorded fault data from operating momentum exchange devices on spacecraft would show whether the model reproduces observed behaviors.
Figures
read the original abstract
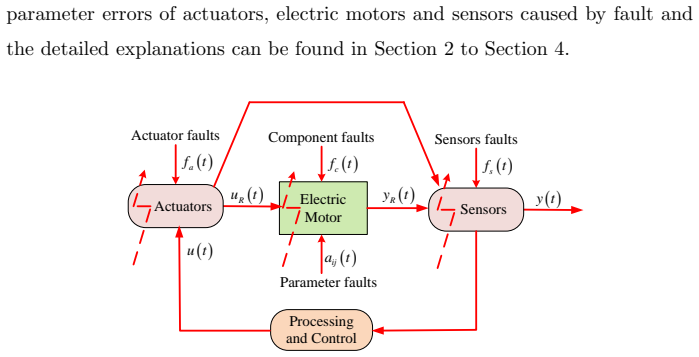
This paper investigates the mechanism of various faults of momentum exchange devices. These devices are modeled as a cascade electric motor EM - variable speed drive VSD system. Considering the mechanical part of the EM and the VSD system, the potential faults are reviewed and summarized. Thus with a clear understanding of these potential faults, a general fault model in a cascade multiplicative structure is established for momentum exchange devices. Based on this general model, various fault scenarios can be simulated, and the possible output can be appropriately visualized. In this paper, six types of working condition are identified and the corresponding fault models are constructed. Using this fault model, the control responses using reaction wheels and single gimbal control moment gyros under various fault conditions are demonstrated. The simulation results show the severities of the faults and demonstrate that the additive fault is more serious than the multiplicative fault from the viewpoint of control accuracy. Finally, existing fault-tolerant control strategies are brief summarized and potential approaches including both passive and active ones to accommodate gimbal fault of single gimbal control moment gyro is demonstrated.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper reviews mechanical faults in the electric motor (EM) and variable speed drive (VSD) components of momentum exchange devices modeled as an EM-VSD cascade. From this review it constructs a general fault model using a cascade multiplicative structure, defines six working conditions with corresponding fault models, simulates the resulting outputs for reaction wheels and single-gimbal control moment gyros, shows that additive faults degrade control accuracy more than multiplicative faults, and briefly surveys existing fault-tolerant control strategies while demonstrating one approach for gimbal faults.
Significance. If the multiplicative cascade form can be shown to exhaustively capture the reviewed faults without unmodeled residuals, the framework would supply a practical simulation tool for visualizing fault effects and testing passive/active FTC designs in spacecraft attitude control. The explicit comparison of additive versus multiplicative severity and the six-condition taxonomy are concrete contributions that could guide controller robustness analysis.
major comments (1)
- [Abstract / model-construction section] Abstract and model-construction section: the claim that the cascade multiplicative structure constitutes a 'general' fault model is load-bearing for the central contribution, yet the manuscript provides no explicit mapping showing that every reviewed mechanical fault in the EM-VSD system reduces to multiplicative parameters without residual additive effects, unmodeled electrical dynamics, or structural changes outside the chosen form. The observation that additive faults are more serious than multiplicative ones directly tests whether the multiplicative cascade is exhaustive rather than a modeling convenience.
minor comments (2)
- The six working conditions are introduced without a table or explicit enumeration of the corresponding multiplicative parameters; adding such a summary would improve traceability from the fault review to the simulation cases.
- Notation for the cascade structure (e.g., how the multiplicative factors combine across EM and VSD stages) should be defined once with a single equation block rather than reintroduced in each simulation subsection.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The major comment raises a valid point about the need for explicit justification of the 'general' claim. We address it point-by-point below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract / model-construction section] Abstract and model-construction section: the claim that the cascade multiplicative structure constitutes a 'general' fault model is load-bearing for the central contribution, yet the manuscript provides no explicit mapping showing that every reviewed mechanical fault in the EM-VSD system reduces to multiplicative parameters without residual additive effects, unmodeled electrical dynamics, or structural changes outside the chosen form. The observation that additive faults are more serious than multiplicative ones directly tests whether the multiplicative cascade is exhaustive rather than a modeling convenience.
Authors: We agree that an explicit mapping would strengthen the presentation. The cascade multiplicative structure was derived directly from the reviewed mechanical faults (friction, efficiency loss, torque ripple, etc.) in the EM-VSD system, each of which primarily scales the torque or speed transmission rather than adding offsets or altering system order. We will add a new table in the revised model-construction section that maps every fault reviewed in the paper to the specific multiplicative parameters, noting any residual effects or electrical dynamics left unmodeled. The additive-fault comparison is introduced separately to quantify severity differences for controller design purposes and does not serve as a test of exhaustiveness; the multiplicative form is proposed specifically for the mechanical faults catalogued, while additive terms represent distinct fault classes (e.g., sensor bias). revision: yes
Circularity Check
No significant circularity; model derived from external fault review
full rationale
The paper's central step reviews and summarizes mechanical faults in the EM-VSD cascade from the literature, then constructs a multiplicative structure to simulate scenarios. This is a standard modeling choice with no reduction of any claimed result to fitted inputs, self-referential definitions, or load-bearing self-citations. No equations are presented that equate a 'prediction' to its own construction parameters, and the six working conditions are identified directly from the reviewed faults rather than forced by prior author results. The derivation remains self-contained against the reviewed inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Potential faults in the mechanical part of the EM and VSD system can be reviewed and summarized to yield a general model.
Reference graph
Works this paper leans on
-
[1]
P. Tsiotras, H. Shen, and C. Hall. Satellite attitude control and power tracking with energy/momentum wheels. Journal of Guidance, Control, and Dynamics, 24(1):23–34, 2001
work page 2001
-
[2]
Q. Shen, D. Wang, S. Zhu, and E. K. Poh. Robust control allocation for spacecraft attitude tracking under actuator faults. IEEE Transactions on Control Systems Technology, 25(3):1068–1075, 2017
work page 2017
-
[3]
B. Wie, D. Bailey, and C. Heiberg. Rapid multitarget acquisition and pointing control of agile spacecraft. Journal of Guidance, Control, and Dynamics, 25(1):96–104, 2002
work page 2002
-
[4]
J. Ahmed and D. S. Bernstein. Adaptive control of double-gimbal control- moment gyro with unbalanced rotor. Journal of guidance, control, and dynamics, 25(1):105–115, 2002
work page 2002
-
[5]
B. Wie, D. Bailey, and C. Heiberg. Singularity robust steering logic for redundant single-gimbal control moment gyros. Journal of Guidance, Con- trol, and Dynamics , 24(5):865–872, 2001. 36
work page 2001
-
[6]
Pleiades system archi- tecture and main performances
M Alain Gleyzes, Lionel Perret, and Philippe Kubik. Pleiades system archi- tecture and main performances. International Archives of the Photogram- metry, Remote Sensing and Spatial Information Sciences , 39(1):537–542, 2012
work page 2012
-
[7]
Radiometric and geometric analysis of worldview-2 stereo scenes
D Poli, E Angiuli, and F Remondino. Radiometric and geometric analysis of worldview-2 stereo scenes. International archives of photogrammetry and remote sensing and spatial information sciences , 38(Part 1):15–18, 2010
work page 2010
-
[8]
F. L. Markley and J. L. Crassidis. Fundamentals of spacecraft attitude determination and control, volume 33. Springer, 2014
work page 2014
-
[9]
A. Fekih. Fault diagnosis and fault tolerant control design for aerospace sys- tems: A bibliographical review. In American Control Conference (ACC), 2014, pages 1286–1291. IEEE, 2014
work page 2014
-
[10]
J. Jiang and X. Yu. Fault-tolerant control systems: A comparative study between active and passive approaches. Annual Reviews in control , 36(1):60–72, 2012
work page 2012
-
[11]
S. Murugesan and P.S. Goel. Fault-tolerant spacecraft attitude control system. Sadhana, 11(1-2):233–261, 1987
work page 1987
-
[12]
Q. Shen, D. Wang, S. Zhu, and E. K. Poh. Finite-time fault-tolerant atti- tude stabilization for spacecraft with actuator saturation. IEEE Transac- tions on Aerospace and Electronic Systems , 51(3):2390–2405, 2015
work page 2015
-
[13]
A. Noumi and M. Takahashi. Fault-tolerant attitude control systems for satellite equipped with control moment gyros. In AIAA Guidance, Navi- gation, and Control (GNC) Conference , page 5119, 2013
work page 2013
- [14]
-
[15]
B. Bialke. High fidelity mathematical modeling of reaction wheel perfor- mance. In 1998 Annual American Astronautical Socitety Rocky Mountain Guidance and Control Conference on Advances in the Astronautical Sci- ences, pages 483–496, 1998
work page 1998
- [16]
-
[17]
Y.C. Choi, J. H. Son, and H. S. Ahn. Fault detection and isolation for a small cmg-based satellite: A fuzzy q-learning approach. Aerospace Science and Technology, 47:340–355, 2015
work page 2015
-
[18]
H. A. Toliyat, S. Nandi, S. Choi, and H. Meshgin-Kelk. Electric Machines: Modeling, Condition Monitoring, and Fault Diagnosis . CRC Press, 2013
work page 2013
-
[19]
D. Kastha and B. K. Bose. Investigation of fault modes of voltage-fed inverter system for induction motor drive. IEEE Transactions on Industry Applications, 30(4):1028–1038, 1994
work page 1994
- [20]
-
[21]
D. U. Campos-Delgado, D. R. Espinoza-Trejo, and E. Palacios. Fault- tolerant control in variable speed drives: a survey. IET Electric Power Applications, 2(2):121–134, 2008
work page 2008
-
[22]
S. Rajagopalan, J. M. Aller, J. A. Restrepo, T. G. Habetler, and R. G. Harley. Detection of rotor faults in brushless dc motors operating under nonstationary conditions. IEEE Transactions on Industry Applications , 42(6):1464–1477, 2006
work page 2006
-
[23]
O. Moseler and R. Isermann. Application of model-based fault detection to a brushless dc motor. IEEE Transactions on industrial electronics , 47(5):1015–1020, 2000. 38
work page 2000
-
[24]
S. Rajagopalan. Detection of rotor and load faults in brushless DC mo- tors operating under stationary and non-stationary conditions . PhD thesis, Georgia Institute of Technology, 2006
work page 2006
-
[25]
J. Chen and R. J. Patton. Robust model-based fault diagnosis for dynamic systems, volume 3
-
[26]
G. M. Joksimovic and J. Penman. The detection of inter-turn short cir- cuits in the stator windings of operating motors. IEEE Transactions on Industrial electronics, 47(5):1078–1084, 2000
work page 2000
- [27]
-
[28]
A. Morar. Stepper motor model for dynamic simulation. Acta Elec- trotehnica, 44(2):117–122, 2003
work page 2003
- [29]
-
[30]
S. K. Pal. Direct drive high energy permanent magnet brush and brushless dc motors for robotic applications. In IEE Colloquium on Robot Actuators, pages 12–1. IET, 1991
work page 1991
-
[31]
S. K. Pal. Design criteria for brushless dc motors with hollow rotor of samarium cobalt for applications above 25000 rpm in vacuum. In Fifth International Conference on Electrical Machines and Drives , pages 115–
-
[32]
R. Fisher. Design and cost considerations for permanent magnet dc motor applications. Power Conversion & Intelligent Motion , 17(7):18–24, 1991
work page 1991
-
[33]
Report of large motor reliability survey of industrial and commercial installations, part i
Motor Reliability Working Group et al. Report of large motor reliability survey of industrial and commercial installations, part i. IEEE Trans. Industrial Applications, 1(4):865–872, 1985. 39
work page 1985
- [34]
-
[35]
F. A. Leve, B. J. Hamilton, and M. A. Peck. Spacecraft momentum control systems. Springer, 2015
work page 2015
-
[36]
J. Jin, S. Ko, and C. K. Ryoo. Fault tolerant control for satellites with four reaction wheels. Control Engineering Practice, 16(10):1250–1258, 2008
work page 2008
-
[37]
B. Xiao, Q. Hu, and Y. Zhang. Adaptive sliding mode fault tolerant attitude tracking control for flexible spacecraft under actuator saturation. IEEE Transactions on Control Systems Technology, 20(6):1605–1612, 2012
work page 2012
-
[38]
T. Sasaki and T. Shimomura. Fault-tolerant architecture of two parallel double-gimbal variable-speed control moment gyros. In AIAA Guidance, Navigation, and Control Conference , 2016-0090
work page 2016
-
[39]
H. Schaub and J. L. Junkins. Singularity avoidance using null motion and variable-speed control moment gyros. Journal of Guidance, Control, and Dynamics, 23(1):11–16, 2000
work page 2000
-
[40]
H. Yoon and P. Tsiotras. Singularity analysis of variable speed control moment gyros. Journal of Guidance, Control, and Dynamics , 27(3):374– 386, 2004
work page 2004
- [41]
- [42]
-
[43]
X. Cao, C. Yue, M. Liu, and B. Wu. Time efficient spacecraft maneu- ver using constrained torque distribution. Acta Astronautica, 123:320–329, 2016. 40
work page 2016
-
[44]
S. Yin, B. Xiao, S. X. Ding, and D. Zhou. A review on recent development of spacecraft attitude fault tolerant control system. IEEE Transactions on Industrial Electronics, 63(5):3311–3320, 2016
work page 2016
-
[45]
Y. Zhang and J. Jiang. Bibliographical review on reconfigurable fault- tolerant control systems. Annual reviews in control, 32(2):229–252, 2008
work page 2008
- [46]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.