Edge Detection for Event Cameras using Intra-pixel-area Events
Pith reviewed 2026-05-24 20:29 UTC · model grok-4.3
The pith
Intra-pixel-area events from plane fits on the surface of active events let event cameras preserve sharper edges by estimating lifetimes until nearby pixels fire.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
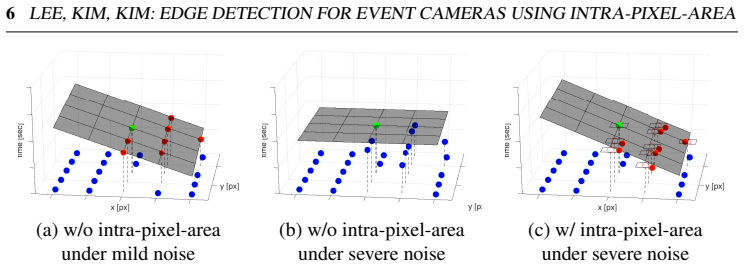
Defining an intra-pixel-area event as the point inside the pixel closest to the fitted plane on the surface of active events allows the lifetime of each event to be estimated more robustly, so that the edge shape is preserved by extending the event until a corresponding event appears in a nearby pixel.
What carries the argument
Intra-pixel-area event: the point inside the pixel area closest to the plane fitted on the surface of active events, which supplies the lifetime estimate used for edge preservation.
Load-bearing premise
That the intra-pixel-area event supplies a robust and precise lifetime estimate that actually preserves edges better than fixed accumulation.
What would settle it
On a standard event-camera dataset with ground-truth edges, measure whether the new method's sharpness and similarity scores fall below those obtained by accumulating events over fixed time or count windows.
Figures

read the original abstract
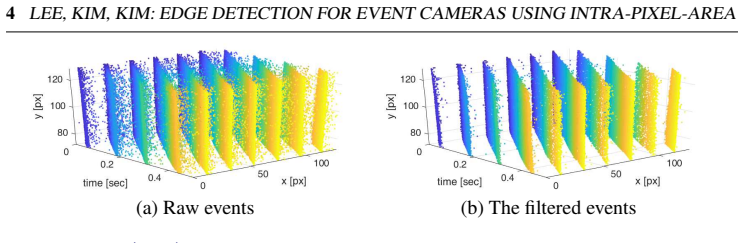
In this work, we propose an edge detection algorithm by estimating a lifetime of an event produced from dynamic vision sensor (DVS), also known as event camera. The event camera, unlike traditional CMOS camera, generates sparse event data at a pixel whose log-intensity changes. Due to this characteristic, theoretically, there is only one or no event at the specific time, which makes it difficult to grasp the world captured by the camera at a particular moment. In this work, we present an algorithm that keeps the event alive until the corresponding event is generated in a nearby pixel so that the shape of an edge is preserved. Particularly, we consider a pixel area to fit a plane on Surface of Active Events (SAE) and call the point inside the pixel area closest to the plane as a intra-pixel-area event. These intra-pixel-area events help the fitting plane algorithm to estimate life time robustly and precisely. Our algorithm performs better in terms of sharpness and similarity metric than the accumulation of events over fixed counts or time intervals, when compared with the existing edge detection algorithms, both qualitatively and quantitatively.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an edge detection algorithm for event cameras (DVS) that estimates event lifetimes on the Surface of Active Events (SAE) by fitting a local plane over a pixel area and defining an intra-pixel-area event as the point inside that area closest to the fitted plane. This point is used to produce more robust lifetime estimates that preserve edge shapes better than fixed-count or fixed-time event accumulation, with claimed superiority over existing methods in both qualitative edge preservation and quantitative sharpness/similarity metrics.
Significance. If the quantitative claims hold under proper validation, the geometric intra-pixel correction offers a parameter-free way to improve edge reconstruction from sparse asynchronous events, which could benefit high-speed robotics and vision tasks. The approach avoids fitted parameters and relies on a direct geometric construction, which is a methodological strength.
major comments (2)
- [Abstract] Abstract: The central claim that the algorithm 'performs better in terms of sharpness and similarity metric ... both qualitatively and quantitatively' is unsupported because the manuscript supplies no experimental setup, dataset details, baseline implementations, numerical results, or figures comparing against fixed-count/time accumulation or prior edge detectors.
- [Section 3] Section 3 (method description): The lifetime estimation rests on the intra-pixel-area event producing robust values, yet the text provides no error propagation analysis, Monte-Carlo noise study, or ablation that removes the intra-pixel correction; a one-pixel shift in the closest point due to timing jitter or curvature would alter the lifetime discontinuously.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for explicit experimental validation and robustness analysis. We address each major comment below and will revise the manuscript to strengthen these aspects.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the algorithm 'performs better in terms of sharpness and similarity metric ... both qualitatively and quantitatively' is unsupported because the manuscript supplies no experimental setup, dataset details, baseline implementations, numerical results, or figures comparing against fixed-count/time accumulation or prior edge detectors.
Authors: We agree that the abstract's performance claim requires detailed supporting evidence. The current manuscript provides qualitative edge preservation examples but lacks the requested specifics on datasets, baselines, and quantitative metrics. In the revised version we will add a dedicated experimental section describing the event camera datasets used, implementation details of the fixed-count/time baselines and prior edge detectors, the sharpness and similarity metrics, numerical tables, and corresponding figures. revision: yes
-
Referee: [Section 3] Section 3 (method description): The lifetime estimation rests on the intra-pixel-area event producing robust values, yet the text provides no error propagation analysis, Monte-Carlo noise study, or ablation that removes the intra-pixel correction; a one-pixel shift in the closest point due to timing jitter or curvature would alter the lifetime discontinuously.
Authors: We acknowledge the absence of a formal robustness analysis. The intra-pixel-area construction aims to mitigate discrete pixel effects by selecting the closest point to the fitted plane, but we recognize that timing jitter or local curvature could introduce sensitivity. In the revision we will add an error-propagation derivation for the plane-fit lifetime, a Monte-Carlo study under realistic timing noise, and an ablation comparing lifetime estimates with and without the intra-pixel correction. We will also discuss the continuity properties and any residual discontinuities. revision: yes
Circularity Check
No circularity: geometric procedure with no self-referential reductions
full rationale
The paper presents an algorithmic procedure: fit a local plane to SAE within a pixel area, define the intra-pixel-area event as the closest point inside the area to that plane, then use it for lifetime estimation. No equations, derivations, or self-citations are shown that reduce the lifetime estimate or the claimed sharpness/similarity gains to a fitted parameter, a renamed input, or a self-citation chain. The central claim rests on the geometric definition and empirical comparison to fixed-count/time accumulation, which is independent of the method itself. This matches the default expectation of a non-circular paper.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Fitting a plane to the Surface of Active Events within a pixel area produces a meaningful intra-pixel-area event for lifetime estimation.
invented entities (1)
-
intra-pixel-area event
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Con- tour detection and characterization for asynchronous event sensors
Francisco Barranco, Ching L Teo, Cornelia Fermuller, and Yiannis Aloimonos. Con- tour detection and characterization for asynchronous event sensors. In Proceedings of 10 LEE, KIM, KIM: EDGE DETECTION FOR EVENT CAMERAS USING INTRA-PIXEL-AREA the IEEE International Conference on Computer Vision, pages 486–494, 2015
work page 2015
-
[2]
Ryad Benosman, Charles Clercq, Xavier Lagorce, Sio-Hoi Ieng, and Chiara Bartolozzi. Event-based visual flow. IEEE Trans. Neural Netw. Learning Syst. , 25(2):407–417, 2014
work page 2014
-
[3]
Edge detector evaluation using empirical roc curves
K Bowyer, C Kranenburg, and S Dougherty. Edge detector evaluation using empirical roc curves. In Proceedings. 1999 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (Cat. No PR00149), volume 1, pages 354–359. IEEE, 1999
work page 1999
-
[4]
A 240× 180 130 db 3 µs latency global shutter spatiotemporal vision sensor
Christian Brandli, Raphael Berner, Minhao Yang, Shih-Chii Liu, and Tobi Delbruck. A 240× 180 130 db 3 µs latency global shutter spatiotemporal vision sensor. IEEE Journal of Solid-State Circuits, 49(10):2333–2341, 2014
work page 2014
-
[5]
Elisedâ ˘AˇTan event-based line segment detector
Christian Brändli, Jonas Strubel, Susanne Keller, Davide Scaramuzza, and Tobi Del- bruck. Elisedâ ˘AˇTan event-based line segment detector. In 2016 Second Interna- tional Conference on Event-based Control, Communication, and Signal Processing (EBCCSP), pages 1–7. IEEE, 2016
work page 2016
-
[6]
A computational approach to edge detection
John Canny. A computational approach to edge detection. IEEE Transactions on Pattern Analysis and Machine Intelligence, 8(6):679–698, 1986
work page 1986
-
[7]
Low-latency event-based visual odometry
Andrea Censi and Davide Scaramuzza. Low-latency event-based visual odometry. In Robotics and Automation (ICRA), 2014 IEEE International Conference on, pages 703–
work page 2014
-
[8]
Guillermo Gallego, Henri Rebecq, and Davide Scaramuzza. A unifying contrast maxi- mization framework for event cameras, with applications to motion, depth, and optical flow estimation. In IEEE Int. Conf. Comput. Vis. Pattern Recog.(CVPR) , volume 1, 2018
work page 2018
-
[9]
Realtime edge-based visual odometry for a monocular camera
Juan Jose Tarrio and Sol Pedre. Realtime edge-based visual odometry for a monocular camera. In Proceedings of the IEEE International Conference on Computer Vision , pages 702–710, 2015
work page 2015
-
[10]
Edge-based robust rgb-d visual odometry using 2-d edge divergence minimization
Changhyeon Kim, Pyojin Kim, Sangil Lee, and H Jin Kim. Edge-based robust rgb-d visual odometry using 2-d edge divergence minimization. In 2018 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS), pages 1–9. IEEE, 2018
work page 2018
-
[11]
Simultaneous mosaicing and tracking with an event camera
Hanme Kim, Ankur Handa, Ryad Benosman, Sio-Hoi Ieng, and Andrew J Davison. Simultaneous mosaicing and tracking with an event camera. J. Solid State Circ , 43: 566–576, 2008
work page 2008
-
[12]
Real-time 3d reconstruction and 6-dof tracking with an event camera
Hanme Kim, Stefan Leutenegger, and Andrew J Davison. Real-time 3d reconstruction and 6-dof tracking with an event camera. InEuropean Conference on Computer Vision, pages 349–364. Springer, 2016
work page 2016
-
[13]
A 128 ×128 120 db 15 µ s latency asynchronous temporal contrast vision sensor
Patrick Lichtsteiner, Christoph Posch, and Tobi Delbruck. A 128 ×128 120 db 15 µ s latency asynchronous temporal contrast vision sensor. IEEE journal of solid-state circuits, 43(2):566–576, 2008. LEE, KIM, KIM: EDGE DETECTION FOR EVENT CAMERAS USING INTRA-PIXEL-AREA 11
work page 2008
-
[14]
Edge slam: Edge points based monocular visual slam
Soumyadip Maity, Arindam Saha, and Brojeshwar Bhowmick. Edge slam: Edge points based monocular visual slam. In Proceedings of the IEEE International Conference on Computer Vision, pages 2408–2417, 2017
work page 2017
-
[15]
Event-based, 6-dof pose track- ing for high-speed maneuvers
Elias Mueggler, Basil Huber, and Davide Scaramuzza. Event-based, 6-dof pose track- ing for high-speed maneuvers. In Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJ International Conference on, pages 2761–2768. IEEE, 2014
work page 2014
-
[16]
Lifetime estimation of events from dynamic vision sensors
Elias Mueggler, Christian Forster, Nathan Baumli, Guillermo Gallego, and Davide Scaramuzza. Lifetime estimation of events from dynamic vision sensors. In 2015 IEEE international conference on Robotics and Automation (ICRA), pages 4874–4881. IEEE, 2015
work page 2015
-
[17]
Fast event-based corner detection
Elias Mueggler, Chiara Bartolozzi, and Davide Scaramuzza. Fast event-based corner detection. In 28th British Machine Vision Conference (BMVC), 2017
work page 2017
-
[18]
A similarity metric for edge images
Miguel Segui Prieto and Alastair R Allen. A similarity metric for edge images. IEEE Transactions on Pattern Analysis and Machine Intelligence, 25(10):1265–1273, 2003
work page 2003
-
[19]
Sajjad Seifozzakerini, Wei-Yun Yau, Bo Zhao, and Kezhi Mao. Event-based hough transform in a spiking neural network for multiple line detection and tracking using a dynamic vision sensor. In BMVC, 2016
work page 2016
-
[20]
Canny-vo: Visual odometry with rgb-d cameras based on geometric 3-d–2-d edge alignment
Yi Zhou, Hongdong Li, and Laurent Kneip. Canny-vo: Visual odometry with rgb-d cameras based on geometric 3-d–2-d edge alignment. IEEE Transactions on Robotics, 35(1):184–199, 2019
work page 2019
-
[21]
Event-based visual inertial odometry
Alex Zihao Zhu, Nikolay Atanasov, and Kostas Daniilidis. Event-based visual inertial odometry. In CVPR, pages 5816–5824, 2017
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.