Adventures in Abstraction: Reachability in Hierarchical Drawings
Pith reviewed 2026-05-24 15:01 UTC · model grok-4.3
The pith
Customized path and channel decompositions visualize reachability in directed graphs by aligning vertices vertically and drawing only a subset of edges.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By customizing the path and channel decomposition concepts, algorithms are presented that produce hierarchical drawings of directed graphs displaying reachability, with vertices of each path or channel vertically aligned, no dummy vertices introduced, and only a subset of edges drawn, all in O(kn + m) time where k is the number of paths or channels.
What carries the argument
Customized path and channel decompositions that group vertices into vertically aligned paths or channels to highlight reachability paths in the drawing.
If this is right
- Only a subset of the edges needs to be drawn, reducing visual complexity of the resulting drawing.
- Transitivity information can be stored using lower memory requirements for very large graphs and databases.
- Drawings can be produced at increasing levels of abstraction by varying the number of paths or channels.
- The approach applies directly to the problem of showing and storing transitivity information.
Where Pith is reading between the lines
- The vertical alignment of vertices on paths could support interactive tools for querying reachability in large networks.
- The method's focus on a subset of edges might combine with existing transitive closure algorithms to handle even larger data sets.
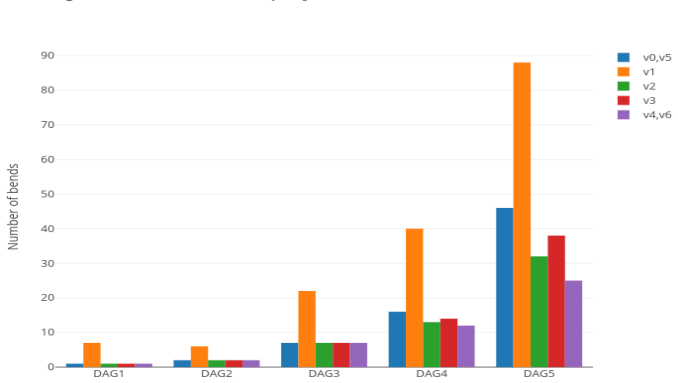
- Experiments on the trade-off between bends and crossings suggest similar decompositions could be tested on other layout styles beyond hierarchical drawings.
Load-bearing premise
Customizing path and channel decompositions will produce drawings where reachability is clearly displayed as shown by experiments balancing bends, crossings, and clarity.
What would settle it
A collection of drawings from the algorithms in which reachability between vertices cannot be determined quickly because of high numbers of crossings or non-obvious path alignments.
Figures



read the original abstract
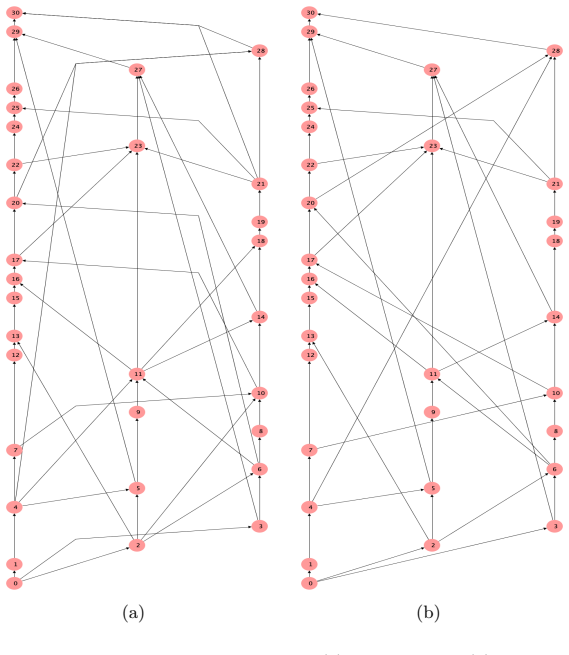
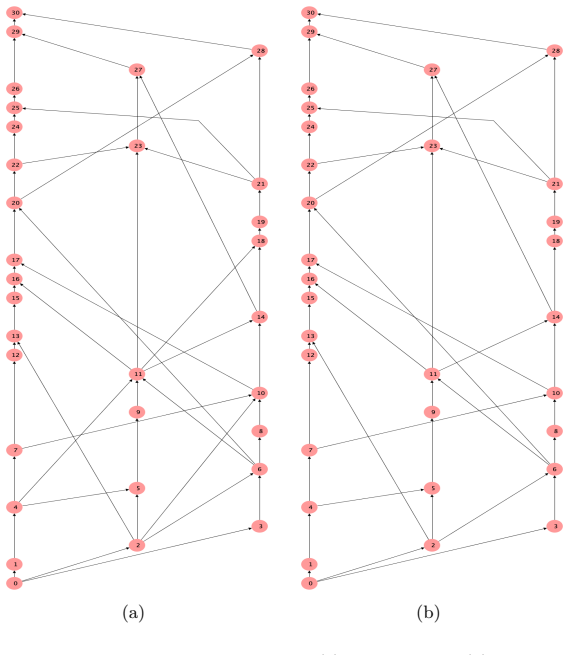
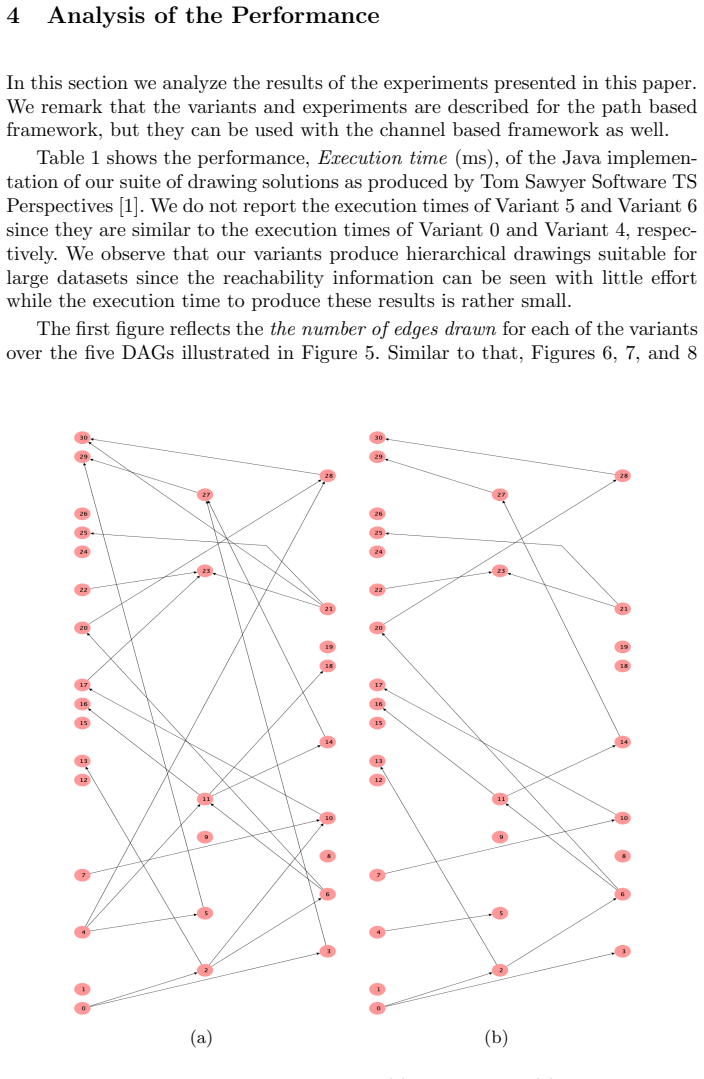
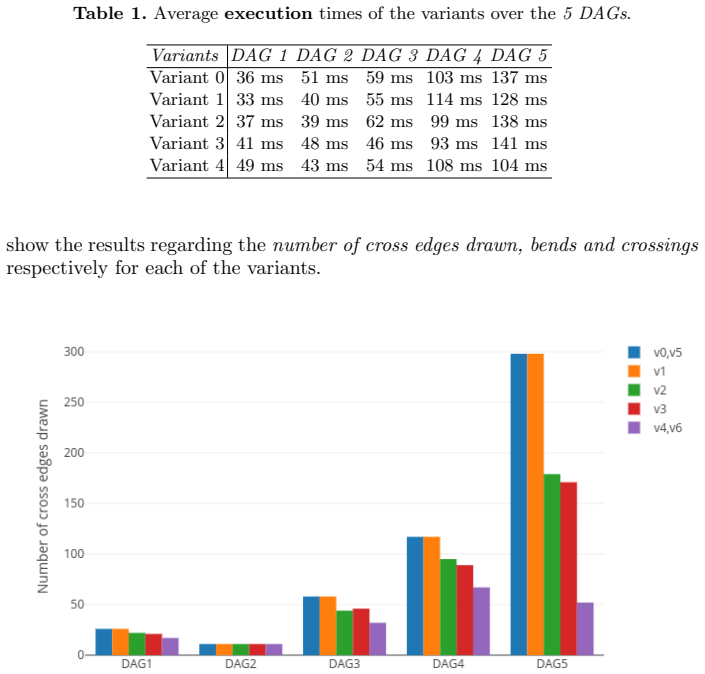
We present algorithms and experiments for the visualization of directed graphs that focus on displaying their reachability information. Our algorithms are based on the concepts of the path and channel decomposition as proposed in the framework presented in GD 2018 (pp. 579-592) and focus on showing the existence of paths clearly. In this paper we customize these concepts and present experimental results that clearly show the interplay between bends, crossings and clarity. Additionally, our algorithms have direct applications to the important problem of showing and storing transitivity information of very large graphs and databases. Only a subset of the edges is drawn, thus reducing the visual complexity of the resulting drawing, and the memory requirements for storing the transitivity information. Our algorithms require almost linear time, $O(kn+m)$, where $k$ is the number of paths/channels, $n$ and $m$ is the number of vertices and edges, respectively. They produce progressively more abstract drawings of the input graph. No dummy vertices are introduced and the vertices of each path/channel are vertically aligned.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents algorithms for visualizing directed graphs to emphasize reachability information. Building on path and channel decompositions from the GD 2018 framework, the authors customize these concepts to produce hierarchical drawings in which vertices of each path or channel are vertically aligned, no dummy vertices are added, and only a subset of edges is drawn. The algorithms are claimed to run in O(kn + m) time and to yield progressively more abstract drawings; experimental results are reported on the interplay among bends, crossings, and visual clarity. Direct applications to compact storage of transitivity information in large graphs and databases are discussed.
Significance. If the claimed linear-time bound holds and the customizations demonstrably improve reachability clarity without post-hoc parameter tuning, the work would offer a practical contribution to graph drawing and to the compact representation of transitive closures. The absence of dummy vertices and the vertical-alignment property are attractive for readability and for downstream applications such as database visualization. The experimental focus on bends versus crossings is a positive step toward falsifiable claims about clarity, though its strength cannot be evaluated from the abstract alone.
major comments (2)
- [Abstract] The abstract asserts an O(kn + m) running time but supplies neither the algorithm description, the definition of the customized path/channel decomposition, nor a proof sketch. Without these, it is impossible to verify whether the bound is achieved or whether the customizations preserve the properties needed for the reachability claim.
- [Abstract] The claim that the drawings 'clearly show the existence of paths' rests on experimental results whose measurement protocol (how reachability clarity is quantified, how post-hoc choices of k are made, and which baseline drawings are used) is not described. This makes the central empirical support for the customizations impossible to assess.
minor comments (2)
- [Abstract] Grammatical error: 'n and m is the number' should read 'n and m are the numbers'.
- [Abstract] The phrase 'progressively more abstract drawings' is used without a precise definition of the abstraction ordering or the stopping criterion.
Simulated Author's Rebuttal
We thank the referee for the comments on our manuscript. We address each major comment below, clarifying the relationship between the abstract and the full technical content.
read point-by-point responses
-
Referee: [Abstract] The abstract asserts an O(kn + m) running time but supplies neither the algorithm description, the definition of the customized path/channel decomposition, nor a proof sketch. Without these, it is impossible to verify whether the bound is achieved or whether the customizations preserve the properties needed for the reachability claim.
Authors: The abstract is a concise summary. The manuscript supplies the requested material: the customized path and channel decompositions are defined in Section 3, the algorithms (including the vertical-alignment and no-dummy-vertex properties) are presented in Section 4, and the O(kn + m) analysis appears in the same section together with the argument that the selected edges preserve reachability. The customizations inherit the reachability guarantees of the GD 2018 framework while adding the alignment constraint. revision: no
-
Referee: [Abstract] The claim that the drawings 'clearly show the existence of paths' rests on experimental results whose measurement protocol (how reachability clarity is quantified, how post-hoc choices of k are made, and which baseline drawings are used) is not described. This makes the central empirical support for the customizations impossible to assess.
Authors: The experimental protocol, including the clarity metric, the procedure for selecting k, and the baseline drawings, is described in Section 5. The abstract reports the outcome of those experiments. A one-sentence reference to Section 5 could be added to the abstract if the editor prefers. revision: partial
Circularity Check
No significant circularity identified
full rationale
The abstract describes algorithms that customize path and channel decomposition concepts from the cited GD 2018 framework, then presents new experimental results on the interplay of bends, crossings, and clarity along with a claimed O(kn+m) runtime. No derivation, equation, or self-referential definition is exhibited that reduces any claimed result to its own inputs by construction; the citation supplies an external starting point that is then modified, and the work adds independent content via customizations and applications to transitivity storage. This is the normal case of a paper that is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The path and channel decomposition framework proposed in GD 2018 is suitable for representing and visualizing reachability in directed graphs.
Reference graph
Works this paper leans on
-
[1]
Tom Sawyer Software, www.tomsawyer.com
-
[2]
Gansner, E.R., Koutsofios, E., North, S.C., Vo, K.: A technique for draw- ing directed graphs. IEEE Trans. Software Eng. 19(3), 214–230 (1993). https://doi.org/10.1109/32.221135, https://doi.org/10.1109/32.221135
-
[3]
Hopcroft, J.E., Karp, R.M.: An n 5/2 algorithm for maximum match- ings in bipartite graphs. SIAM J. Comput. 2(4), 225–231 (1973). https://doi.org/10.1137/0202019, https://doi.org/10.1137/0202019
-
[4]
Jagadish, H.V.: A compression technique to materialize transitive closure. ACM Trans. Database Syst. 15(4), 558–598 (Dec 1990). https://doi.org/10.1145/99935.99944, http://doi.acm.org/10.1145/99935. 99944
-
[5]
Jin, R., Ruan, N., Dey, S., Yu, J.X.: SCARAB: scaling reachability computation on large graphs. In: Proceedings of the ACM SIGMOD International Conference on Management of Data, SIGMOD 2012, Scottsdale, AZ, USA, May 20-24, 2012. pp. 169–180 (2012). https://doi.org/10.1145/2213836.2213856, https://doi.org/ 10.1145/2213836.2213856
-
[6]
Kuosmanen, A., Paavilainen, T., Gagie, T., Chikhi, R., Tomescu, A.I., M¨ akinen, V.: Using minimum path cover to boost dynamic programming on dags: Co- linear chaining extended. In: Research in Computational Molecular Biology - 22nd Annual International Conference, RECOMB 2018, Paris, France, April 21-24, 2018, Proceedings. pp. 105–121 (2018). https://doi...
-
[7]
World Wide Web 20(4), 677–696 (2017)
Li, L., Hua, W., Zhou, X.: HD-GDD: high dimensional graph dominance drawing approach for reachability query. World Wide Web 20(4), 677–696 (2017). https://doi.org/10.1007/s11280-016-0407-z, https://doi.org/10.1007/ s11280-016-0407-z
-
[8]
In: Symposium on Theory of Com- puting Conference, STOC’13, Palo Alto, CA, USA, June 1-4, 2013
Orlin, J.B.: Max flows in O(nm) time, or better. In: Symposium on Theory of Com- puting Conference, STOC’13, Palo Alto, CA, USA, June 1-4, 2013. pp. 765–774 (2013). https://doi.org/10.1145/2488608.2488705, http://doi.acm.org/10.1145/ 2488608.2488705
-
[9]
In: International Symposium on Graph Drawing and Network Visualization
Ortali, G., Tollis, I.G.: Algorithms and bounds for drawing directed graphs. In: International Symposium on Graph Drawing and Network Visualization. pp. 579–
-
[10]
Graph cube: On warehousing and OLAP multidimensional networks
van Schaik, S.J., de Moor, O.: A memory efficient reachability data structure through bit vector compression. In: Proceedings of the ACM SIGMOD Inter- national Conference on Management of Data, SIGMOD 2011, Athens, Greece, June 12-16, 2011. pp. 913–924 (2011). https://doi.org/10.1145/1989323.1989419, https://doi.org/10.1145/1989323.1989419
-
[11]
Schnorr, C.: An algorithm for transitive closure with linear expected time. SIAM J. Comput. 7(2), 127–133 (1978). https://doi.org/10.1137/0207011, https://doi. org/10.1137/0207011
-
[12]
IEEE Transactions on Systems, Man, and Cybernetics 11(2), 109–125 (1981)
Sugiyama, K., Tagawa, S., Toda, M.: Methods for visual understanding of hierar- chical system structures. IEEE Transactions on Systems, Man, and Cybernetics 11(2), 109–125 (1981)
work page 1981
-
[13]
Veloso, R.R., Cerf, L., Jr., W.M., Zaki, M.J.: Reachability queries in very large graphs: A fast refined online search approach. In: Proceed- ings of the 17th International Conference on Extending Database Technol- ogy, EDBT 2014, Athens, Greece, March 24-28, 2014. pp. 511–522 (2014). 14 https://doi.org/10.5441/002/edbt.2014.46, https://doi.org/10.5441/002...
-
[14]
Yildirim, H., Chaoji, V., Zaki, M.J.: GRAIL: a scalable index for reach- ability queries in very large graphs. VLDB J. 21(4), 509–534 (2012). https://doi.org/10.1007/s00778-011-0256-4, https://doi.org/10.1007/ s00778-011-0256-4 15 Appendix 6 Algorithm PB-Draw The following algorithm and theorems and lemmas are from [9] Theorem 2. LetG be a DAG and letSp b...
-
[15]
assign to every vertex v∈ V belonging to the decomposition path Pi an x- coordinate X(v) = 2i and an y-coordinate Y (v) =Tv
-
[16]
draw every edge e = (u,v )∈E straight line. 2: If the straight line drawing of e intersects some vertex w∈V different from u orv in Γ , introduce a bend on e in the position (Xb,Y b), where Yb =Y (v)− 1 and:
-
[17]
If X(u)<X (v): Xb =X(u) + 1
-
[18]
The following Lemmas and Theorem are proved in [9]
Else, if X(u)≥X(v): X(be) =X(u)− 1 Let Γ be a drawing computed by PB-Draw. The following Lemmas and Theorem are proved in [9]. Lemma 1. Any edge e = (u,v ) does not intersect a vertex different from u and v in Γ . The following lemma shows how Algorithm PB-Draw bundles the edges. We apply this technique of bundling in every variant of PB-Draw that we intro...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.