Optimal Science-time Reorientation Policy for the Comet Interceptor Flyby via Sequential Convex Programming
Pith reviewed 2026-05-24 13:51 UTC · model grok-4.3
The pith
Sequential convex programming generates optimal reorientation trajectories for maximizing science time in spacecraft flybys.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
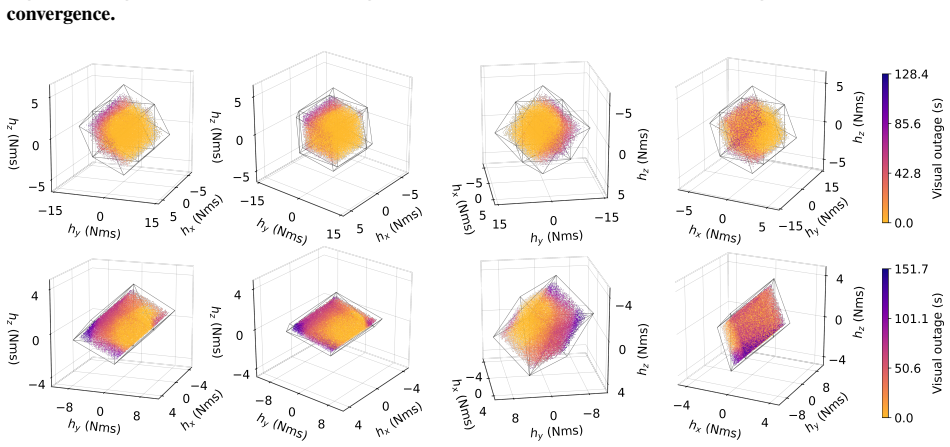
The central claim is that non-convex pointing objectives and constraints in spacecraft reorientation can be reformulated as convex cardinality minimization problems solvable via sequential convex programming, enabling viable trajectories for the Comet Interceptor flyby even with reaction wheel failures or dust particle impacts.
What carries the argument
Sequential convex programming reformulating non-convex pointing objectives into convex cardinality minimization problems.
If this is right
- The approach produces trajectories that maximize the time the target remains in the field of view of scientific instruments.
- Trajectories respect torque and momentum limits on reaction wheels and sun exclusion constraints.
- The method handles potential faults in actuators and prior dust particle impacts.
- Solutions can be computed efficiently on limited hardware resources using second-order conic constraint solvers.
Where Pith is reading between the lines
- This method could extend to other high-speed flyby missions requiring precise attitude control under constraints.
- The use of cardinality minimization might allow similar handling of discrete-like decisions in other spacecraft optimization problems.
- If the convex approximations are accurate, mission planners could use this instead of slower nonlinear optimizers for real-time or onboard use.
Load-bearing premise
The sequence of convex cardinality minimization problems can approximate the original nonlinear dynamics and non-convex constraints closely enough to yield feasible and high-quality solutions for the true problem.
What would settle it
Running the method on the Comet Interceptor scenario and finding that the generated trajectory violates the sun exclusion constraint or achieves significantly less science time than a known better solution when simulated with the full nonlinear model.
Figures







read the original abstract
This paper introduces an algorithm to perform optimal reorientation of a spacecraft during a high speed flyby mission that maximizes the time a certain target is kept within the field of view of scientific instruments. The method directly handles the nonlinear dynamics of the spacecraft, sun exclusion constraint, torque and momentum limits on the reaction wheels as well as potential faults in these actuators. A sequential convex programming approach was used to reformulate non-convex pointing objectives and other constraints in terms of a series of novel convex cardinality minimization problems. These subproblems were then efficiently solved even on limited hardware resources using convex programming solvers implementing second-order conic constraints. The proposed method was applied to a scenario that involved maximizing the science time for the upcoming Comet Interceptor flyby mission developed by the European Space Agency. Extensive simulation results demonstrate the capability of the approach to generate viable trajectories even in the presence of reaction wheel failures or prior dust particle impacts.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a sequential convex programming (SCP) algorithm for optimal spacecraft reorientation during a high-speed flyby to maximize the time a target remains in the instrument field of view. Non-convex pointing objectives and constraints (nonlinear dynamics, sun exclusion, torque/momentum limits, actuator faults) are reformulated as a sequence of convex cardinality minimization subproblems solved via second-order cone programming (SOCP). The method is applied to the Comet Interceptor mission, with simulations demonstrating viable trajectories under reaction wheel failures and dust particle impacts.
Significance. If the convex approximations are shown to produce solutions with bounded suboptimality and maintained feasibility for the original problem, the work provides a practical, computationally tractable approach for onboard attitude optimization in constrained flyby scenarios. The handling of actuator faults via the same framework and the use of cardinality minimization for pointing objectives represent targeted extensions of SCP techniques to mission-specific requirements.
major comments (1)
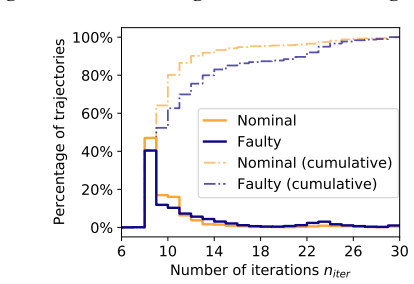
- [Simulation results] The central claim that the sequence of convex cardinality-minimization subproblems produces viable trajectories without significant degradation relative to the original non-convex problem (abstract and simulation results) requires quantitative support. A dedicated convergence or suboptimality analysis section comparing SCP solutions against a non-convex benchmark or ground-truth optimizer on at least one representative case would directly address the approximation quality.
minor comments (2)
- Clarify in the abstract and introduction what specific aspect of the cardinality minimization formulation is novel relative to prior SCP applications in spacecraft control (e.g., the particular relaxation or constraint encoding used).
- Ensure all figures showing trajectories include explicit labels for the sun exclusion cone and reaction wheel saturation limits to improve readability of the constraint satisfaction results.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and the recommendation for major revision. We agree that strengthening the quantitative validation of the SCP approximation quality is important and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Simulation results] The central claim that the sequence of convex cardinality-minimization subproblems produces viable trajectories without significant degradation relative to the original non-convex problem (abstract and simulation results) requires quantitative support. A dedicated convergence or suboptimality analysis section comparing SCP solutions against a non-convex benchmark or ground-truth optimizer on at least one representative case would directly address the approximation quality.
Authors: We acknowledge that the manuscript does not currently include a direct quantitative comparison of SCP solutions to a non-convex benchmark. In the revised version we will add a dedicated subsection (likely in Section 5) that performs such an analysis on at least one representative Comet Interceptor case. This will involve solving the original non-convex problem with a nonlinear programming solver (e.g., IPOPT) on a simplified dynamics model to quantify the suboptimality gap, constraint violation, and feasibility retention of the SCP solutions. The new results will be presented alongside the existing simulations to directly support the claims in the abstract and simulation sections. revision: yes
Circularity Check
No significant circularity; derivation applies standard SCP to new problem
full rationale
The paper applies sequential convex programming to reformulate non-convex spacecraft reorientation objectives and constraints (nonlinear dynamics, sun exclusion, actuator limits) into a sequence of convex cardinality-minimization subproblems solved via SOCP. This is a standard algorithmic technique applied to a mission-specific instance; the abstract and simulation claims present the method as an approximation whose quality is validated externally by numerical results on the Comet Interceptor scenario, including fault cases. No equations reduce a claimed prediction or uniqueness result to a fitted parameter or self-citation by construction, and no load-bearing premise depends on prior author work that itself assumes the target result. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Convex optimization solvers implementing second-order conic constraints can efficiently solve the subproblems even on limited hardware resources.
Reference graph
Works this paper leans on
-
[1]
The European Space Agency’s Comet Interceptor lies in wait,
Snodgrass, C., and Jones, G. H., “The European Space Agency’s Comet Interceptor lies in wait,”Nature Communications, Vol. 10, No. 1, 2019, p. 5418. doi:10.1038/s41467-019-13470-1, URLhttp://www.nature.com/articles/s41467-019- 13470-1
-
[2]
Potential Backup Targets for Comet Interceptor,
Schwamb, M. E., Knight, M. M., Jones, G. H., Snodgrass, C., Bucci, L., Sánchez Pérez, J. M., and Skuppin, N., “Potential Backup Targets for Comet Interceptor,”Research Notes of the AAS, Vol. 4, No. 2, 2020, p. 21. doi:10.3847/2515-5172/ab7300, URL https://iopscience.iop.org/article/10.3847/2515-5172/ab7300
-
[3]
Discretized Constrained Attitude Pathfinding and Control for Satellites,
Kjellberg, H. C., and Lightsey, E. G., “Discretized Constrained Attitude Pathfinding and Control for Satellites,”Journal of Guidance, Control, and Dynamics, Vol. 36, No. 5, 2013, pp. 1301–1309. doi:10.2514/1.60189, URLhttp://arc.aiaa.org/ doi/10.2514/1.60189
-
[4]
Tanygin, S., “Fast Autonomous Three-Axis Constrained Attitude Pathfinding and Visualization for Boresight Alignment,” Journal of Guidance, Control, and Dynamics, Vol. 40, No. 2, 2017, pp. 358–370. doi:10.2514/1.G001801, URLhttp: //arc.aiaa.org/doi/10.2514/1.G001801
-
[5]
A randomized attitude slew planning algorithm for autonomous spacecraft,
Feron, E., Dahleh, M., Frazzoli, E., and Kornfeld, R., “A randomized attitude slew planning algorithm for autonomous spacecraft,” , 8 2001. doi:10.2514/6.2001-4155, URLhttp://arc.aiaa.org/doi/10.2514/6.2001-4155
-
[6]
Onboard Spacecraft Slew-Planning by Heuristic State-Space Search and Optimization,
Cui, P., Zhong, W., and Cui, H., “Onboard Spacecraft Slew-Planning by Heuristic State-Space Search and Optimization,”2007 International Conference on Mechatronics and Automation, IEEE, 2007, pp. 2115–2119. doi:10.1109/ICMA.2007.4303878, URL http://ieeexplore.ieee.org/document/4303878/
-
[7]
A constraint monitor algorithm for the Cassini spacecraft,
Singh, G., Macala, G., Wong, E., Rasmussen, R., Singh, G., Macala, G., Wong, E., and Rasmussen, R., “A constraint monitor algorithm for the Cassini spacecraft,” , 8 1997. doi:10.2514/6.1997-3526, URLhttp://arc.aiaa.org/doi/10.2514/6. 1997-3526
-
[8]
Saturated Attitude Control for Rigid Spacecraft Under Attitude Constraints,
Hu, Q., Liu, Y., Dong, H., and Zhang, Y., “Saturated Attitude Control for Rigid Spacecraft Under Attitude Constraints,” Journal of Guidance, Control, and Dynamics, Vol. 43, No. 4, 2020, pp. 790–805. doi:10.2514/1.G004613, URLhttps: //arc.aiaa.org/doi/10.2514/1.G004613. 14 0 50 100 150 Visual outage (s) 40% 60% 80% 100%Percentage of trajectories Nominal Fa...
-
[9]
Avanzini, G., Radice, G., and Ali, I., “Potential approach for constrained autonomous manoeuvres of a spacecraft equipped with a cluster of control moment gyroscopes,”Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, Vol. 223, No. 3, 2009, pp. 285–296. doi:10.1243/09544100JAERO375, URLhttp://journals. sagepu...
-
[10]
Radice, G., and Casasco, M., “On different parameterisation methods to analyse spacecraft attitude manoeuvres in the presence 15 of attitude constraints,”The Aeronautical Journal, Vol. 111, No. 1119, 2007, pp. 335–342. doi:10.1017/S0001924000004589, URL https://www.cambridge.org/core/product/identifier/S0001924000004589/type/journal_article
-
[11]
Potential field methods and their inherent limitations for mobile robot navigation,
Koren, Y., and Borenstein, J., “Potential field methods and their inherent limitations for mobile robot navigation,”IEEE International Conference on Robotics and Automation, IEEE Comput. Soc. Press, 1991, pp. 1398–1404. doi:10.1109/ROBOT. 1991.131810, URLhttp://ieeexplore.ieee.org/document/131810/
-
[12]
Survey of convex optimization for aerospace applications,
Liu, X., Lu, P., and Pan, B., “Survey of convex optimization for aerospace applications,”Astrodynamics, Vol. 1, No. 1, 2017, pp. 23–40. doi:10.1007/s42064-017-0003-8, URL http://link.springer.com/10.1007/s42064-017-0003-8
-
[13]
Real-time Optimization in Aerospace Systems,
Dueri, D. A., “Real-time Optimization in Aerospace Systems,” Ph.D. thesis, University of Washington, 2018
work page 2018
-
[14]
Model Predictive Control in Aerospace Systems: Current State and Opportunities,
Eren, U., Prach, A., Koçer, B. B., Raković, S. V., Kayacan, E., and Açıkmeşe, B., “Model Predictive Control in Aerospace Systems: Current State and Opportunities,”Journal of Guidance, Control, and Dynamics, Vol. 40, No. 7, 2017, pp. 1541–1566. doi:10.2514/1.G002507, URLhttps://arc.aiaa.org/doi/10.2514/1.G002507
-
[15]
Trajectory Design Employing Convex Optimization for Landing on Irregularly Shaped Asteroids,
Pinson, R. M., and Lu, P., “Trajectory Design Employing Convex Optimization for Landing on Irregularly Shaped Asteroids,” Journal of Guidance, Control, and Dynamics, Vol. 41, No. 6, 2018, pp. 1243–1256. doi:10.2514/1.G003045, URL https://arc.aiaa.org/doi/10.2514/1.G003045
-
[16]
Maximum Divert for Planetary Landing Using Convex Optimization,
Harris, M. W., and Açıkmeşe, B., “Maximum Divert for Planetary Landing Using Convex Optimization,”Journal of Optimization Theory and Applications, Vol. 162, No. 3, 2014, pp. 975–995. doi:10.1007/s10957-013-0501-7, URL http://link.springer.com/10.1007/s10957-013-0501-7
-
[17]
Acikmese, B., Carson, J. M., and Blackmore, L., “Lossless Convexification of Nonconvex Control Bound and Pointing Constraints of the Soft Landing Optimal Control Problem,”IEEE Transactions on Control Systems Technology, Vol. 21, No. 6, 2013, pp. 2104–2113. doi:10.1109/TCST.2012.2237346, URLhttp://ieeexplore.ieee.org/document/6428631/
-
[18]
Discretization Performance and Accuracy Analysis for the Rocket Powered Descent Guidance Problem,
Malyuta, D., Reynolds, T., Szmuk, M., Mesbahi, M., Acikmese, B., and Carson, J. M., “Discretization Performance and Accuracy Analysis for the Rocket Powered Descent Guidance Problem,” , 1 2019. doi:10.2514/6.2019-0925, URL https://arc.aiaa.org/doi/10.2514/6.2019-0925
-
[19]
Virgili-Llop, J., and Romano, M., “Simultaneous Capture and Detumble of a Resident Space Object by a Free-Flying Spacecraft-Manipulator System,”Frontiers in Robotics and AI, Vol. 6, 2019. doi:10.3389/frobt.2019.00014, URLhttps: //www.frontiersin.org/article/10.3389/frobt.2019.00014/full
-
[20]
Autonomous Trajectory Planning for Rendezvous and Proximity Operations by Conic Optimization,
Lu, P., and Liu, X., “Autonomous Trajectory Planning for Rendezvous and Proximity Operations by Conic Optimization,” Journal of Guidance, Control, and Dynamics, Vol. 36, No. 2, 2013, pp. 375–389. doi:10.2514/1.58436, URLhttp: //arc.aiaa.org/doi/10.2514/1.58436
-
[21]
Morgan, D., Subramanian, G. P., Chung, S.-J., and Hadaegh, F. Y., “Swarm assignment and trajectory optimization using variable-swarm, distributed auction assignment and sequential convex programming,”The International Journal of Robotics Research, Vol. 35, No. 10, 2016, pp. 1261–1285. doi:10.1177/0278364916632065, URLhttp://journals.sagepub.com/ doi/10.11...
-
[22]
Successive convexification of non-convex optimal control problems and its convergence properties,
Mao, Y., Szmuk, M., and Acikmese, B., “Successive convexification of non-convex optimal control problems and its convergence properties,”2016 IEEE 55th Conference on Decision and Control (CDC), IEEE, 2016, pp. 3636–3641. doi: 10.1109/CDC.2016.7798816, URLhttp://ieeexplore.ieee.org/document/7798816/
-
[23]
GuSTO: Guaranteed Sequential Trajectory optimization via Sequential Convex Programming,
Bonalli, R., Cauligi, A., Bylard, A., and Pavone, M., “GuSTO: Guaranteed Sequential Trajectory optimization via Sequential Convex Programming,”2019 International Conference on Robotics and Automation (ICRA), IEEE, 2019, pp. 6741–6747. doi:10.1109/ICRA.2019.8794205, URLhttps://ieeexplore.ieee.org/document/8794205/
-
[24]
Szmuk, M., Reynolds, T. P., and Acikmese, B., “Successive Convexification for Real-Time 6-DoF Powered Descent Guidance with State-Triggered Constraints,” , 11 2018. URLhttp://arxiv.org/abs/1811.10803
-
[25]
On the Constrained Attitude Control Problem,
Kim, Y., Mesbahi, M., Singh, G., and Hadaegh, F., “On the Constrained Attitude Control Problem,” , 8 2004. doi: 10.2514/6.2004-5129, URLhttp://arc.aiaa.org/doi/10.2514/6.2004-5129
-
[26]
Spacecraft synchronization in the presence of attitude constrained zones,
Unsik Lee, and Mesbahi, M., “Spacecraft synchronization in the presence of attitude constrained zones,”2012 American Control Conference (ACC), IEEE, 2012, pp. 6071–6076. doi:10.1109/ACC.2012.6315561, URLhttp://ieeexplore.ieee. org/document/6315561/. 16
-
[27]
Constrained spacecraft reorientation using mixed integer convex programming,
Tam, M., and Glenn Lightsey, E., “Constrained spacecraft reorientation using mixed integer convex programming,”Acta Astronautica, Vol. 127, 2016, pp. 31–40. doi:10.1016/j.actaastro.2016.04.003, URLhttps://linkinghub.elsevier.com/ retrieve/pii/S0094576516303150
-
[28]
A mixed integer convex programming approach to Constrained Attitude Guidance,
Eren, U., Acikmese, B., and Scharf, D. P., “A mixed integer convex programming approach to Constrained Attitude Guidance,”2015 European Control Conference (ECC), IEEE, 2015, pp. 1120–1126. doi:10.1109/ECC.2015.7330690, URL http://ieeexplore.ieee.org/document/7330690/
-
[29]
Malyuta, D., Reynolds, T., Szmuk, M., Acikmese, B., and Mesbahi, M., “Fast Trajectory Optimization via Successive Convexification for Spacecraft Rendezvous with Integer Constraints,”AIAA Scitech 2020 Forum, American Institute of Aeronautics and Astronautics, Reston, Virginia, 2020. doi:10.2514/6.2020-0616, URLhttps://arc.aiaa.org/doi/10. 2514/6.2020-0616
-
[30]
OntheConvexParameterizationofConstrainedSpacecraftReorientation,
Kim,Y.,Mesbahi,M.,Singh,G.,andHadaegh,F.Y.,“OntheConvexParameterizationofConstrainedSpacecraftReorientation,” IEEETransactionsonAerospaceandElectronicSystems ,Vol.46,No.3,2010,pp.1097–1109.doi:10.1109/TAES.2010.5545176, URL http://ieeexplore.ieee.org/document/5545176/
-
[31]
Virgili-Llop, J., Zagaris, C., Zappulla, R., Bradstreet, A., and Romano, M., “A convex-programming-based guidance algorithm to capture a tumbling object on orbit using a spacecraft equipped with a robotic manipulator,”The International Journal of Robotics Research, Vol. 38, No. 1, 2019, pp. 40–72. doi:10.1177/0278364918804660, URLhttp://journals.sagepub. ...
-
[32]
l1-norm Methods for Convex Cardinality Problems,
Boyd, S., “l1-norm Methods for Convex Cardinality Problems,” , 2007
work page 2007
-
[33]
Trajectory optimization with inter-sample obstacle avoidance via successive convexification,
Dueri, D., Mao, Y., Mian, Z., Ding, J., and Acikmese, B., “Trajectory optimization with inter-sample obstacle avoidance via successive convexification,”2017 IEEE 56th Annual Conference on Decision and Control (CDC), IEEE, 2017, pp. 1150–1156. doi:10.1109/CDC.2017.8263811, URLhttp://ieeexplore.ieee.org/document/8263811/
-
[34]
Conn, A. R., Gould, N. I. M., and Toint, P. L.,Trust Region Methods, Vol. 1, Society for Industrial and Applied Mathematics,
-
[35]
doi:10.1137/1.9780898719857, URLhttp://epubs.siam.org/doi/book/10.1137/1.9780898719857
-
[36]
A rewriting system for convex optimization problems,
Agrawal, A., Verschueren, R., Diamond, S., and Boyd, S., “A rewriting system for convex optimization problems,”Journal of Control and Decision, Vol. 5, No. 1, 2018, pp. 42–60. doi:10.1080/23307706.2017.1397554, URL https://www. tandfonline.com/doi/full/10.1080/23307706.2017.1397554
-
[37]
ECOS: An SOCP solver for embedded systems,
Domahidi, A., Chu, E., and Boyd, S., “ECOS: An SOCP solver for embedded systems,”2013 European Control Conference (ECC), IEEE, 2013, pp. 3071–3076. 17 Table 2 Numerical values of the benchmark parameters Parameter Value Spacecraft Initial relative position in the inertial frame𝒓𝑐¹0º 70001000 0 𝑇 km Velocity in the inertial frame 0 70 0 𝑇 kms Initial quat...
work page 2013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.