Unsupervised Learning of Robust Spectral Shape Matching
Pith reviewed 2026-05-24 09:12 UTC · model grok-4.3
The pith
A novel unsupervised loss couples functional maps and point-wise maps to produce accurate 3D shape correspondences directly without post-processing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
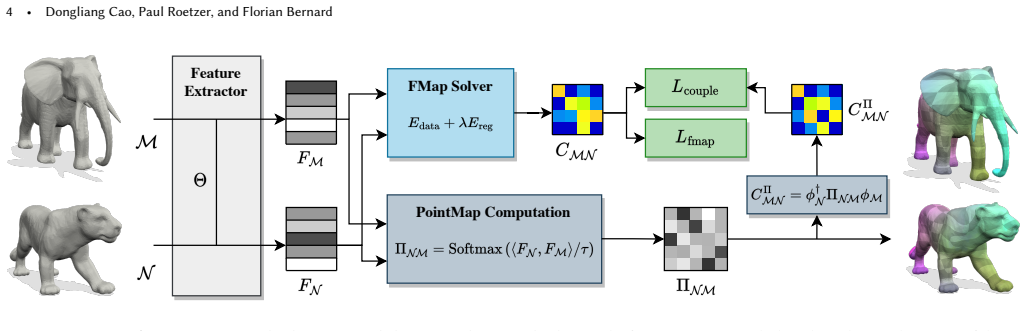
Building on the known relation between functional maps and point-wise maps, the authors define an unsupervised loss that couples the two representations during training; the trained network then yields accurate point-wise maps directly at inference time, without any post-processing, and maintains this accuracy on non-isometric, partial, and noisy shapes.
What carries the argument
The novel unsupervised loss that couples functional maps and point-wise maps during training.
If this is right
- Point-wise correspondences become available at test time without extra optimization or refinement steps.
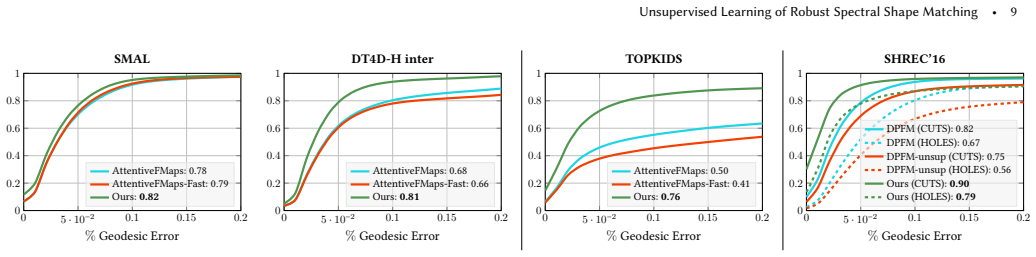
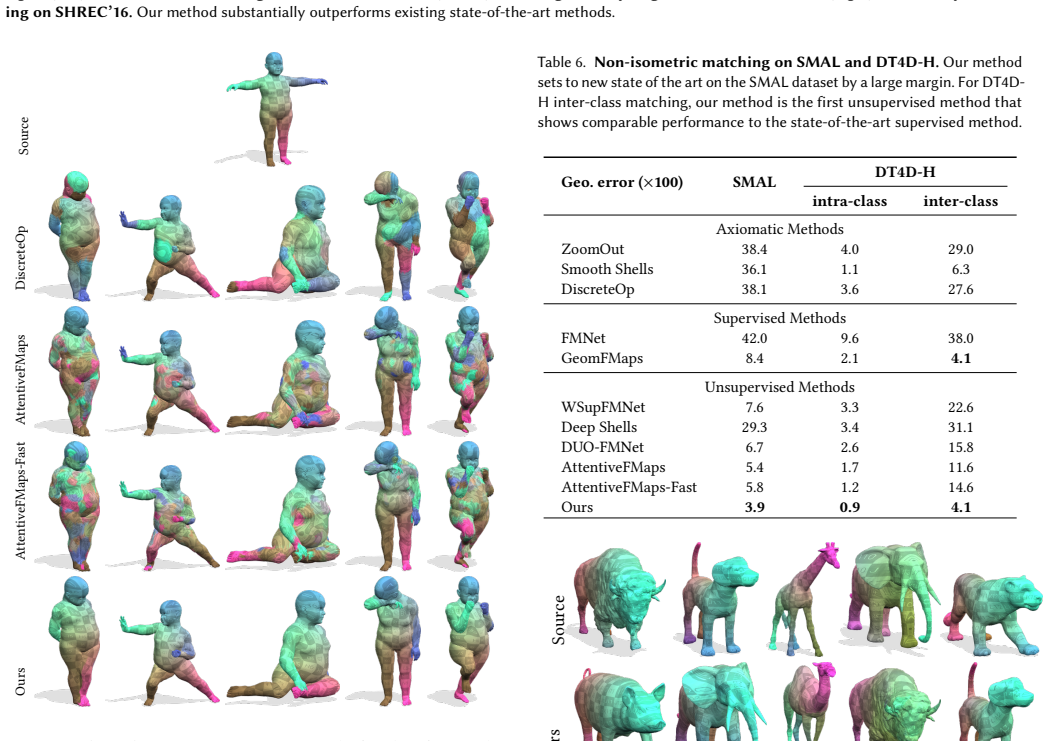
- The same training procedure works across near-isometric, non-isometric, partial, and topologically noisy shapes.
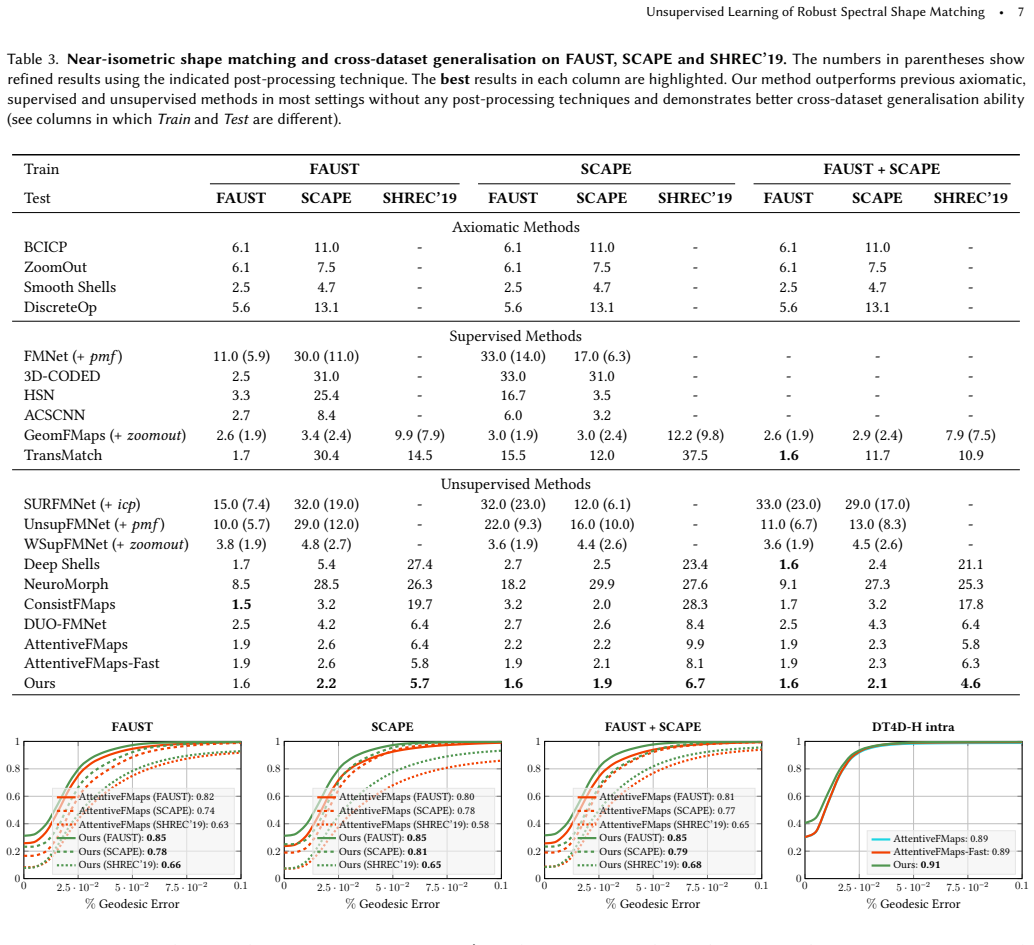
- Performance on nine separate datasets exceeds that of prior unsupervised and supervised spectral matching methods.
- The method removes dependence on any particular choice of post-processing algorithm.
- Training remains fully unsupervised yet still yields maps that generalize to discretization changes.
Where Pith is reading between the lines
- The coupling loss could be adapted to other map-learning tasks where functional and point-wise representations coexist.
- If the same loss works on real-world scanned data with varying mesh densities, it would simplify many geometry-processing pipelines.
- Extending the approach to time-varying or articulated shapes would test whether the coupling remains stable under deformation.
- Replacing the current network backbone with a lighter architecture could reveal whether the loss itself, rather than model capacity, drives the gains.
Load-bearing premise
Coupling the functional map and point-wise map inside a single unsupervised loss will produce accurate point-wise maps directly at inference without any post-processing.
What would settle it
On a held-out collection of non-isometric shapes the learned model produces point-wise maps whose accuracy drops below that of a supervised baseline unless an off-the-shelf post-processing step is added.
Figures











read the original abstract
We propose a novel learning-based approach for robust 3D shape matching. Our method builds upon deep functional maps and can be trained in a fully unsupervised manner. Previous deep functional map methods mainly focus on predicting optimised functional maps alone, and then rely on off-the-shelf post-processing to obtain accurate point-wise maps during inference. However, this two-stage procedure for obtaining point-wise maps often yields sub-optimal performance. In contrast, building upon recent insights about the relation between functional maps and point-wise maps, we propose a novel unsupervised loss to couple the functional maps and point-wise maps, and thereby directly obtain point-wise maps without any post-processing. Our approach obtains accurate correspondences not only for near-isometric shapes, but also for more challenging non-isometric shapes and partial shapes, as well as shapes with different discretisation or topological noise. Using a total of nine diverse datasets, we extensively evaluate the performance and demonstrate that our method substantially outperforms previous state-of-the-art methods, even compared to recent supervised methods. Our code is available at https://github.com/dongliangcao/Unsupervised-Learning-of-Robust-Spectral-Shape-Matching.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a fully unsupervised deep learning method for 3D shape matching based on deep functional maps. It introduces a novel loss that couples functional maps with point-wise maps during training, allowing direct inference of accurate point-wise correspondences without post-processing. The method is evaluated on nine datasets covering near-isometric, non-isometric, partial, and topologically noisy shapes, claiming to outperform prior unsupervised and even recent supervised state-of-the-art approaches.
Significance. If the central claim holds, the work would represent a meaningful advance in unsupervised spectral shape matching by removing reliance on off-the-shelf post-processing and achieving strong results on non-isometric and partial cases where functional maps are typically less reliable. The availability of code is a positive factor for reproducibility.
major comments (2)
- [§3.3, Eq. (7)] §3.3, Eq. (7): The unsupervised coupling loss is presented as the key innovation that enables direct point-wise output, but the derivation does not explicitly address how the loss compensates for the reduced reliability of functional maps under non-isometric deformations; an ablation isolating this term on the non-isometric subsets (e.g., SMAL or SHREC'19) would be needed to substantiate the claim.
- [Table 2] Table 2, rows for partial and topological-noise datasets: the reported geodesic errors show improvement over supervised baselines, yet the paper does not report variance across multiple random seeds or cross-validation folds; without this, it is difficult to assess whether the outperformance is statistically robust.
minor comments (2)
- [§4.1] §4.1: The description of the network architecture re-uses the same backbone as prior work without stating the exact hyper-parameters (learning rate schedule, batch size) used for the new loss; these should be listed explicitly for reproducibility.
- [Figure 4] Figure 4: The qualitative visualizations of correspondences on partial shapes would benefit from an additional column showing the functional map before and after the coupling loss to illustrate the effect of the proposed term.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and positive recommendation. We address each major comment below and commit to revisions that strengthen the manuscript.
read point-by-point responses
-
Referee: [§3.3, Eq. (7)] §3.3, Eq. (7): The unsupervised coupling loss is presented as the key innovation that enables direct point-wise output, but the derivation does not explicitly address how the loss compensates for the reduced reliability of functional maps under non-isometric deformations; an ablation isolating this term on the non-isometric subsets (e.g., SMAL or SHREC'19) would be needed to substantiate the claim.
Authors: We appreciate the referee highlighting this point. The coupling loss in Eq. (7) is motivated by the general bijective relationship between functional and point-wise maps (Section 3.3), which holds independently of isometry assumptions and is intended to improve point-wise accuracy across deformation types. However, we acknowledge that the manuscript does not provide an explicit derivation isolating the compensation mechanism for non-isometric cases nor a dedicated ablation on SMAL/SHREC'19. To substantiate the claim, we will add such an ablation study (with and without the coupling term) on the non-isometric subsets in the revised manuscript. revision: yes
-
Referee: Table 2, rows for partial and topological-noise datasets: the reported geodesic errors show improvement over supervised baselines, yet the paper does not report variance across multiple random seeds or cross-validation folds; without this, it is difficult to assess whether the outperformance is statistically robust.
Authors: We agree that reporting variance would allow a clearer assessment of statistical robustness. The current results demonstrate consistent outperformance across nine diverse datasets, but we did not include standard deviations from multiple random seeds. In the revised manuscript we will add standard deviations computed over at least three independent training runs (different random seeds) for the partial and topological-noise entries in Table 2. revision: yes
Circularity Check
No circularity: novel unsupervised loss is original contribution validated externally
full rationale
The paper proposes a new unsupervised loss function that couples functional maps and point-wise maps to enable direct inference without post-processing. This is presented as an original design choice rather than a reduction of any fitted parameter or prior result by construction. Performance is evaluated on nine external datasets against prior SOTA (including supervised methods), with no load-bearing step that renames a fit as a prediction or relies on self-citation chains for the central claim. The relation between maps is invoked as background insight, but the coupling loss itself is the novel element and does not collapse to its inputs.
Axiom & Free-Parameter Ledger
Forward citations
Cited by 3 Pith papers
-
Densemarks: Learning Canonical Embeddings for Human Heads Images via Point Tracks
DenseMarks learns a canonical 3D embedding space for human head images by training a Vision Transformer with contrastive loss on pairwise point tracks from in-the-wild videos, plus landmark and segmentation supervision.
-
LUIVITON: Learned Universal Interoperable VIrtual Try-ON
LUIVITON decomposes 3D virtual try-on into geometry-driven clothing-to-SMPL and diffusion-based body-to-SMPL correspondences, then registers and simulates garment draping on arbitrary humanoids.
-
SGSoft: Learning Fused Semantic-Geometric Features for 3D Shape Correspondence via Template-Guided Soft Signals
SGSoft introduces a template-guided pipeline that fuses semantic and geometric features to learn dense correspondences across deformable 3D shapes with claimed SOTA generalization and real-time efficiency.
Reference graph
Works this paper leans on
-
[1]
SHREC’16: Partial matching of deformable shapes. Proc. 3DOR 2, 9 (2016),
work page 2016
-
[2]
ACM Transactions on Graphics (ToG) 24, 2 (2005), 289–310
Texture transfer during shape transformation. ACM Transactions on Graphics (ToG) 24, 2 (2005), 289–310. Nicolas Donati, Etienne Corman, Simone Melzi, and Maks Ovsjanikov. 2022b. Complex functional maps: A conformal link between tangent bundles. In Computer Graphics Forum. Wiley Online Library. Nicolas Donati, Etienne Corman, and Maks Ovsjanikov. 2022a. De...
work page 2005
-
[3]
Computers & Graphics 92 (2020), 28–43
SHREC’20: Shape correspondence with non-isometric deformations. Computers & Graphics 92 (2020), 28–43. Bernhard Egger, William AP Smith, Ayush Tewari, Stefanie Wuhrer, Michael Zollhoefer, Thabo Beeler, Florian Bernard, Timo Bolkart, Adam Kortylewski, Sami Romdhani, et al
work page 2020
-
[4]
ACM Transactions on Graphics (ToG) 39, 5 (2020), 1–38
3d morphable face models—past, present, and future. ACM Transactions on Graphics (ToG) 39, 5 (2020), 1–38. Marvin Eisenberger, Zorah Lähner, and Daniel Cremers
work page 2020
-
[5]
Neuromorph: Unsupervised shape interpolation and correspondence in one go. In CVPR. Marvin Eisenberger, Aysim Toker, Laura Leal-Taixé, and Daniel Cremers. 2020b. Deep shells: Unsupervised shape correspondence with optimal transport. NIPS (2020). Davide Eynard, Emanuele Rodola, Klaus Glashoff, and Michael M Bronstein
work page 2020
-
[6]
In 2016 Fourth International Conference on 3D Vision (3DV)
Coupled functional maps. In 2016 Fourth International Conference on 3D Vision (3DV). Danielle Ezuz and Mirela Ben-Chen
work page 2016
-
[7]
Danielle Ezuz, Justin Solomon, and Mirela Ben-Chen
Wiley Online Library, 121–134. Danielle Ezuz, Justin Solomon, and Mirela Ben-Chen. 2019b. Reversible harmonic maps between discrete surfaces. ACM Transactions on Graphics (ToG) 38, 2 (2019), 1–12. Maolin Gao, Zorah Lahner, Johan Thunberg, Daniel Cremers, and Florian Bernard
work page 2019
-
[8]
In 2020 International Conference on 3D Vision (3DV)
Simulated annealing for 3d shape correspondence. In 2020 International Conference on 3D Vision (3DV) . Qixing Huang, Fan Wang, and Leonidas Guibas
work page 2020
-
[9]
ACM Transactions on Graphics (ToG) 33, 4 (2014), 1–11
Functional map networks for analyzing and exploring large shape collections. ACM Transactions on Graphics (ToG) 33, 4 (2014), 1–11. Qi-Xing Huang, Bart Adams, Martin Wicke, and Leonidas J Guibas
work page 2014
-
[10]
Categorical Reparameterization with Gumbel-Softmax
Categorical reparameterization with gumbel-softmax. arXiv preprint arXiv:1611.01144 (2016). Vladimir G Kim, Yaron Lipman, and Thomas Funkhouser
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[11]
ACM Transactions on Graphics (ToG) 30, 4 (2011), 1–12
Blended intrinsic maps. ACM Transactions on Graphics (ToG) 30, 4 (2011), 1–12. Diederik P Kingma and Jimmy Ba
work page 2011
-
[12]
SHREC’16: Matching of deformable shapes with topological noise. Proc. 3DOR 2, 10.2312 (2016). Lei Li, Nicolas Donati, and Maks Ovsjanikov
work page 2016
-
[13]
Learning Multi-resolution Functional Maps with Spectral Attention for Robust Shape Matching. NIPS (2022). Qinsong Li, Shengjun Liu, Ling Hu, and Xinru Liu
work page 2022
-
[14]
ACM Transactions on Graphics (ToG) 34, 6 (2015), 1–16
SMPL: A skinned multi-person linear model. ACM Transactions on Graphics (ToG) 34, 6 (2015), 1–16. Robin Magnet, Jing Ren, Olga Sorkine-Hornung, and Maks Ovsjanikov
work page 2015
-
[15]
Correspondence learning via linearly-invariant embedding. In NeurIPS. Simone Melzi, Riccardo Marin, Emanuele Rodolà, Umberto Castellani, Jing Ren, Adrien Poulenard, Peter Wonka, and Maks Ovsjanikov. 2019a. Shrec 2019: Matching humans with different connectivity. In Eurographics Workshop on 3D Object Retrieval . Simone Melzi, Jing Ren, Emanuele Rodolà, Abh...
work page 2019
-
[16]
ACM Transactions on Graphics (ToG) 31, 4 (2012), 1–11
Functional maps: a flexible representation of maps between shapes. ACM Transactions on Graphics (ToG) 31, 4 (2012), 1–11. Maks Ovsjanikov, Quentin Mérigot, Facundo Mémoli, and Leonidas Guibas
work page 2012
-
[17]
Experimental mathematics 2, 1 (1993), 15–36
Computing discrete minimal surfaces and their conjugates. Experimental mathematics 2, 1 (1993), 15–36. Charles Ruizhongtai Qi, Li Yi, Hao Su, and Leonidas J Guibas
work page 1993
-
[18]
Pointnet++: Deep hierarchical feature learning on point sets in a metric space. NIPS (2017). Jing Ren, Simone Melzi, Maks Ovsjanikov, and Peter Wonka
work page 2017
-
[19]
ACM Transactions on Graphics (ToG) 39, 6 (2020), 1–17
MapTree: recovering multiple solutions in the space of maps. ACM Transactions on Graphics (ToG) 39, 6 (2020), 1–17. Jing Ren, Simone Melzi, Peter Wonka, and Maks Ovsjanikov
work page 2020
-
[20]
ACM Transactions on Graphics (ToG) 37 (2018), 1–16
Continuous and orientation-preserving correspondences via functional maps. ACM Transactions on Graphics (ToG) 37 (2018), 1–16. Emanuele Rodolà, Luca Cosmo, Michael M Bronstein, Andrea Torsello, and Daniel Cremers
work page 2018
-
[21]
Point-wise Map Recovery and Refinement from Functional Correspondence
Point-wise map recovery and refinement from functional correspondence. arXiv preprint arXiv:1506.05603 (2015). Emanuele Rodola, Michael Moeller, and Daniel Cremers
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[22]
Samuele Salti, Federico Tombari, and Luigi Di Stefano
Recent advances in shape correspondence.The Visual Computer 36, 8 (2020), 1705–1721. Samuele Salti, Federico Tombari, and Luigi Di Stefano
work page 2020
-
[23]
Computer Vision and Image Understanding 125 (2014), 251–264
SHOT: Unique signatures of histograms for surface and texture description. Computer Vision and Image Understanding 125 (2014), 251–264. Abhishek Sharma and Maks Ovsjanikov
work page 2014
-
[24]
Weakly supervised deep functional maps for shape matching. NIPS (2020). Nicholas Sharp, Souhaib Attaiki, Keenan Crane, and Maks Ovsjanikov
work page 2020
-
[25]
arXiv preprint arXiv:2012.00888 (2020)
Diffusion- net: Discretization agnostic learning on surfaces. arXiv preprint arXiv:2012.00888 (2020). Robert W Sumner and Jovan Popović
-
[26]
ACM Transactions on Graphics (ToG) 23, 3 (2004), 399–405
Deformation transfer for triangle meshes. ACM Transactions on Graphics (ToG) 23, 3 (2004), 399–405. Gary KL Tam, Zhi-Quan Cheng, Yu-Kun Lai, Frank C Langbein, Yonghuai Liu, David Marshall, Ralph R Martin, Xian-Fang Sun, and Paul L Rosin
work page 2004
-
[27]
IEEE transactions on visualization and computer graphics 19, 7 (2012), 1199–1217
Registration of 3D point clouds and meshes: A survey from rigid to nonrigid. IEEE transactions on visualization and computer graphics 19, 7 (2012), 1199–1217. Hugues Thomas, Charles R Qi, Jean-Emmanuel Deschaud, Beatriz Marcotegui, François Goulette, and Leonidas J Guibas
work page 2012
-
[28]
Shape registration in the time of transformers. NIPS (2021). Oliver Van Kaick, Hao Zhang, Ghassan Hamarneh, and Daniel Cohen-Or
work page 2021
-
[29]
ACM Transactions on Graphics (ToG) 39, 4 (2020), 92–1
Cnns on surfaces using rotation-equivariant features. ACM Transactions on Graphics (ToG) 39, 4 (2020), 92–1. Thomas Windheuser, Ulrich Schlickewei, Frank R Schmidt, and Daniel Cremers
work page 2020
-
[30]
3D menagerie: Modeling the 3D shape and pose of animals. In CVPR. ACM Trans. Graph., Vol. 42, No. 4, Article . Publication date: August 2023
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.