Rollbot: a Spherical Robot Driven by a Single Actuator
Pith reviewed 2026-05-24 02:10 UTC · model grok-4.3
The pith
A spherical robot achieves controllable 2D motion using only one actuator by varying the curvature of its circular rolls.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Rollbot is the first spherical robot that controllably maneuvers on a 2D plane with a single actuator by rolling in circular patterns whose curvature is adjusted through acceleration and deceleration of the motor and internal mass, using derived quasi-stable state dynamics and control laws that enable waypoint following.
What carries the argument
Quasi-stable state dynamics and control laws that translate single-motor acceleration and deceleration into changes in rolling trajectory curvature.
If this is right
- Spherical robot hardware can be simplified to a single motor while retaining the ability to reach arbitrary points on a plane.
- Steering occurs through timed speed changes of the internal mass rather than additional drive mechanisms.
- Circular rolling patterns become the basic unit of motion that can be sequenced for path following.
- Control laws derived from the quasi-stable states eliminate the requirement for continuous external sensing during turns.
Where Pith is reading between the lines
- The single-actuator method may lower overall power draw and mechanical complexity compared with two-motor designs.
- The same curvature-control principle could be tested on other internally actuated rolling bodies, such as cylinders or ellipsoids.
- Extending the experiments to surfaces with small slopes or friction variations would show how far the quasi-stable assumption travels beyond ideal flat planes.
Load-bearing premise
Accelerating and decelerating the single motor produces predictable, repeatable changes in path curvature that remain reliable without extra actuators or external references.
What would settle it
A test in which the robot is commanded to trace a specific sequence of circular arcs to reach a waypoint but the actual path deviates by more than the motor timing tolerance would predict.
Figures






read the original abstract
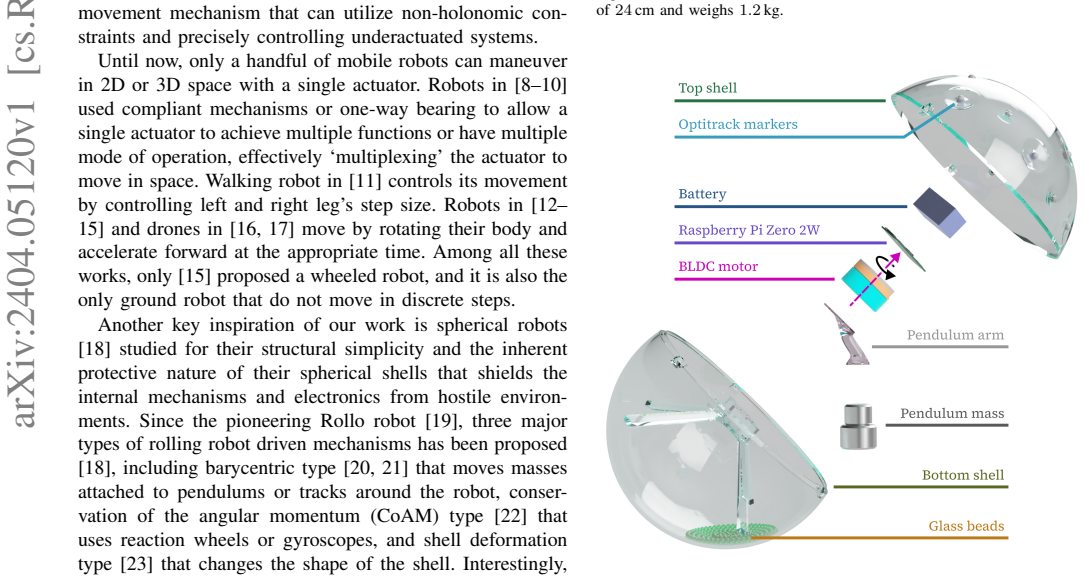
Spherical robots typically require at least two actuators to achieve controlled 2D planar motion. Here we present Rollbot, the first spherical robot capable of controllably maneuvering on a 2D plane with a single actuator, challenging this assumption. Rollbot rolls on the ground in a circular pattern and controls its motion by changing the trajectory's curvature by accelerating and decelerating its single motor and the attached mass according to our derived quasi-stable state dynamics and control laws. We present the theoretical analysis, design, and control of Rollbot, and demonstrate its ability to move in a controllable circular pattern and follow waypoints, validating the efficacy of the proposed theoretical framework.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents Rollbot, a spherical robot driven by a single actuator that achieves controllable 2D planar motion by rolling along circular trajectories whose curvature is modulated through acceleration and deceleration of the internal mass. It derives quasi-stable state dynamics and associated control laws from the rolling physics, then demonstrates the approach via hardware experiments showing controllable circular patterns and waypoint following.
Significance. If the central claim is substantiated, the work would be significant for robotics by showing that single-actuator spherical robots can perform 2D maneuvering, contrary to the typical requirement of at least two actuators. The derivation of control laws from first-principles dynamics (rather than parameter fitting) is a methodological strength that supports potential reproducibility and generalization.
major comments (2)
- [Abstract and §4] Abstract and §4 (control laws): the claim that motor acceleration/deceleration produces reliably invertible and stable changes in trajectory curvature for open-loop waypoint following rests on idealized quasi-stable dynamics; no quantitative evidence (e.g., curvature-vs-speed curves, transient response data, or disturbance rejection metrics) is supplied to confirm monotonicity or repeatability under real rolling conditions.
- [§5] §5 (experiments): waypoint-following results are presented without error bars, trajectory RMSE values, success rates across trials, or comparison against open-loop baselines, leaving the robustness of the derived control laws for arbitrary 2D coverage unverified and load-bearing for the central claim.
minor comments (2)
- [§3] Notation for the quasi-stable states and curvature parameter should be defined explicitly at first use with consistent symbols across equations and figures.
- [§5] Figure captions for the experimental trajectories should include scale bars, motor command time series, and ground-truth reference paths for direct visual assessment of tracking quality.
Simulated Author's Rebuttal
We thank the referee for their constructive comments and positive assessment of the work's significance. We address each major comment below and commit to revisions that strengthen the quantitative support for the control laws and experimental results.
read point-by-point responses
-
Referee: [Abstract and §4] Abstract and §4 (control laws): the claim that motor acceleration/deceleration produces reliably invertible and stable changes in trajectory curvature for open-loop waypoint following rests on idealized quasi-stable dynamics; no quantitative evidence (e.g., curvature-vs-speed curves, transient response data, or disturbance rejection metrics) is supplied to confirm monotonicity or repeatability under real rolling conditions.
Authors: We agree that additional quantitative evidence would strengthen the presentation. The control laws follow directly from the derived quasi-stable dynamics, and the hardware demonstrations of controllable circular trajectories and waypoint following provide supporting evidence of practical invertibility. To address the concern explicitly, the revised manuscript will include curvature-versus-motor-speed curves extracted from the experimental data along with transient response metrics. revision: yes
-
Referee: [§5] §5 (experiments): waypoint-following results are presented without error bars, trajectory RMSE values, success rates across trials, or comparison against open-loop baselines, leaving the robustness of the derived control laws for arbitrary 2D coverage unverified and load-bearing for the central claim.
Authors: The current experiments focus on qualitative demonstration of the single-actuator capability. We acknowledge that statistical metrics would better quantify robustness. The revised version will report RMSE values, error bars, and success rates over multiple trials. Direct comparison to open-loop baselines without curvature modulation is not central to the contribution (which is the derivation and use of the single-actuator control law), but we will add a brief discussion of open-loop behavior for context. revision: partial
Circularity Check
No circularity: derivation from physical rolling dynamics is self-contained
full rationale
The paper derives quasi-stable state dynamics and control laws directly from the physics of single-motor acceleration/deceleration on a spherical body, then validates via demonstration of circular patterns and waypoint following. No equations reduce to fitted parameters renamed as predictions, no self-citations form load-bearing premises, and no ansatz or uniqueness claims are imported from prior author work. The central mapping from motor commands to curvature is presented as an independent theoretical result, not equivalent to its inputs by construction. This matches the reader's assessment that control laws stem from physical dynamics without explicit reduction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Quasi-stable state dynamics govern the robot's circular rolling motion under single-motor control
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
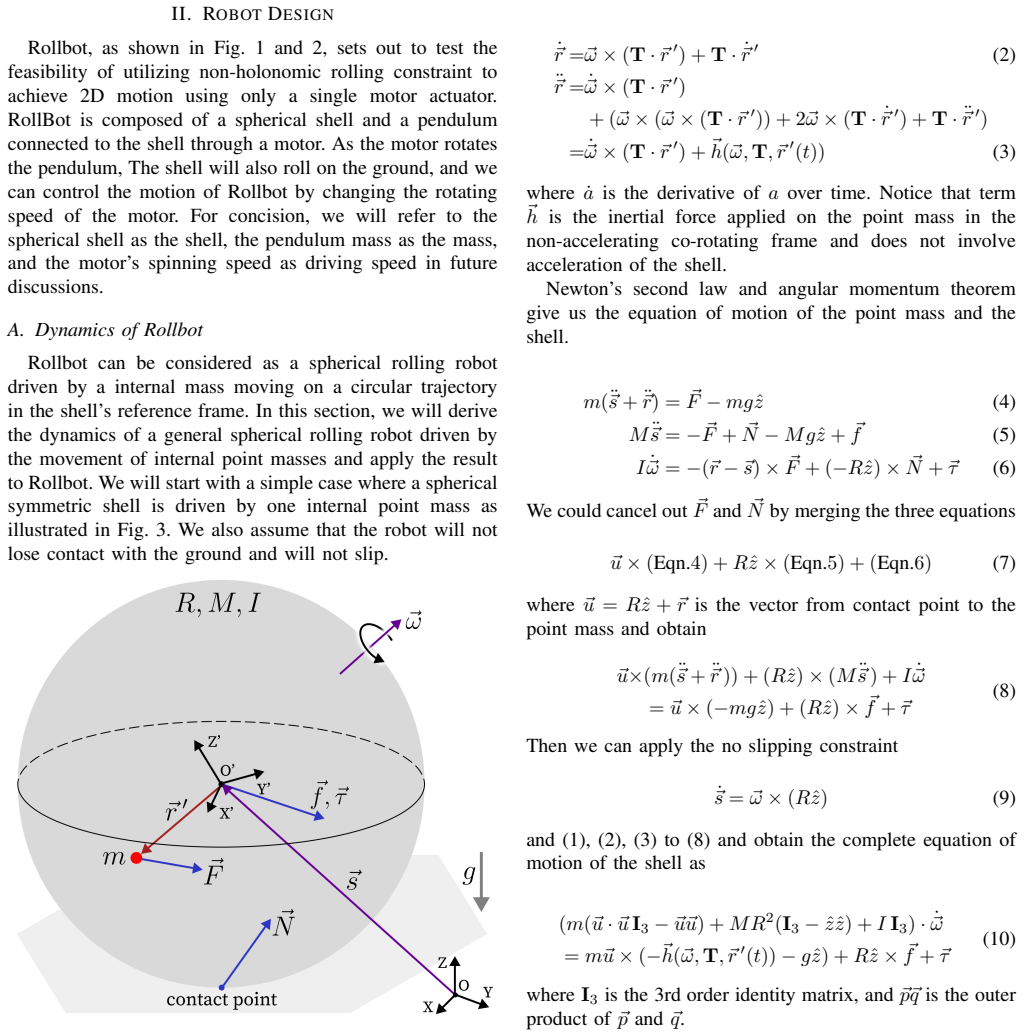
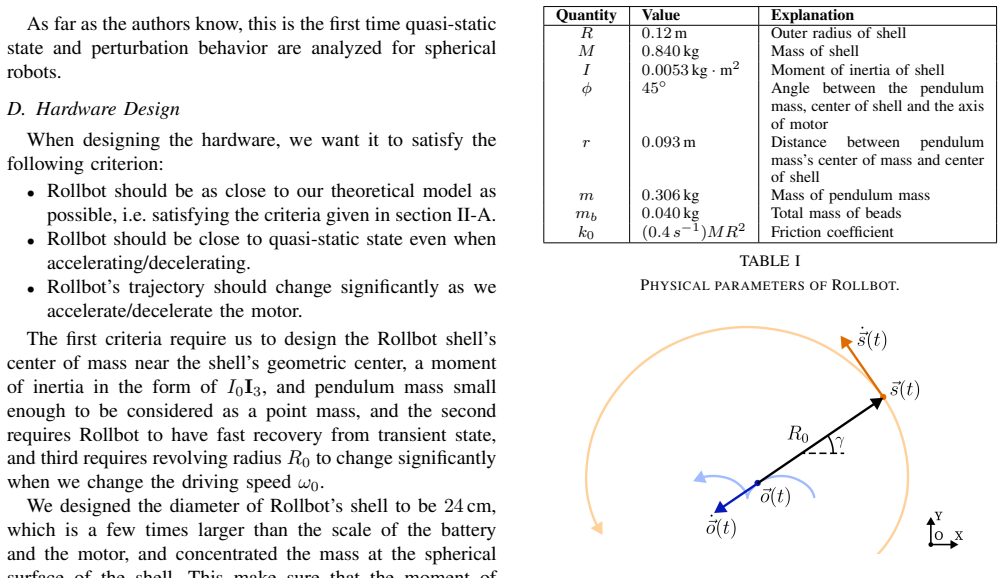
We can also write out the supporting and friction force... The condition for the robot to not jump and not slip... (Eq. 10) ... quasi-static state... numerically solving (22).
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
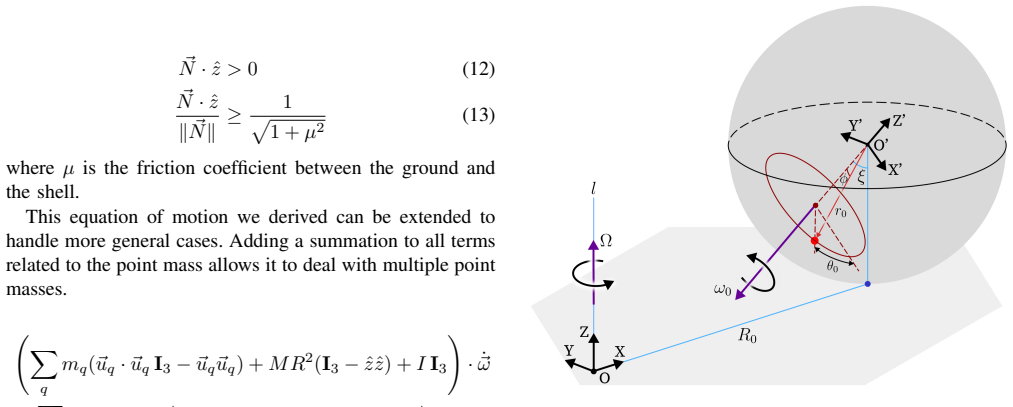
the revolving radius R0 can be modulated by changing the driving speed ω0... vR = −kp(⃗og − ⃗o) · {cos γ, sin γ, 0}
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
SPiralRoll: A Novel Adjustable-Stiffness Underactuated 3-DoF Joint with Torsion Springs for Rolling Robots
SPiralRoll is a novel torsion-spring-based underactuated 3-DoF compliant joint with full-arc and single-arc designs that enables rotational, radial, and axial motions and was demonstrated in a spherical rolling robot.
Reference graph
Works this paper leans on
-
[1]
Underac- tuated Robotics: a Review
Bin He, Shuai Wang, and Yongjia Liu. “Underac- tuated Robotics: a Review”. In: International Jour- nal of Advanced Robotic Systems 16.4 (2019), p. 1729881419862164
work page 2019
-
[2]
The Inverted Pendulum Benchmark in Nonlinear Control Theory: a Survey
Olfa Boubaker. “The Inverted Pendulum Benchmark in Nonlinear Control Theory: a Survey”. In: Inter- national Journal of Advanced Robotic Systems 10.5 (2013), p. 233
work page 2013
-
[3]
Hardware Implementation of the Quadruple In- verted Pendulum with Single Motor
Yanbin Feng Hongxing Li Jiayin Wang and Yundong Gu. “Hardware Implementation of the Quadruple In- verted Pendulum with Single Motor”. In: Progress in Natural Science 14.9 (2004), pp. 822–827
work page 2004
-
[4]
An Anthropomorphic Underactuated Robotic Hand with 15 DOFs and a Single Actuator
Clement Gosselin, Frederic Pelletier, and Thierry Lal- iberte. “An Anthropomorphic Underactuated Robotic Hand with 15 DOFs and a Single Actuator”. In: ICRA. 2008, pp. 749–754
work page 2008
-
[5]
Powerful and Dexterous Multi-finger Hand Using Dynamical Pulley Mecha- nism
Tadaaki Hasegawa et al. “Powerful and Dexterous Multi-finger Hand Using Dynamical Pulley Mecha- nism”. In: ICRA. 2022, pp. 707–713
work page 2022
-
[6]
A Fully Rotational Joint Underactuated Finger Mechanism and Its Kinematics Analysis
Wu Licheng, Kong Yanxuan, and Li Xiali. “A Fully Rotational Joint Underactuated Finger Mechanism and Its Kinematics Analysis”. In: International Journal of Advanced Robotic Systems 13.5 (2016)
work page 2016
-
[7]
Kinematic Analysis of the (nS)-2SPU Underactuated Parallel Wrist
Raffaele Di Gregorio. “Kinematic Analysis of the (nS)-2SPU Underactuated Parallel Wrist”. In: Jour- nal of Mechanisms and Robotics 4.3 (June 2012), p. 031006
work page 2012
-
[8]
Compliance- based Dynamic Steering for Hexapods
David Zarrouk and Ronald S Fearing. “Compliance- based Dynamic Steering for Hexapods”. In: IROS. IEEE. 2012, pp. 3093–3098
work page 2012
-
[9]
Modelling, Control and Simulation of a Sin- gle Rotor UA V with Swashplateless Torque Modula- tion
Evandro Bernardes, Frédéric Boyer, and Stéphane Viollet. “Modelling, Control and Simulation of a Sin- gle Rotor UA V with Swashplateless Torque Modula- tion”. In: Aerospace Science and Technology (2023), p. 108433
work page 2023
-
[10]
MSU Jumper: A Single-motor- actuated Miniature Steerable Jumping Robot
Jianguo Zhao et al. “MSU Jumper: A Single-motor- actuated Miniature Steerable Jumping Robot”. In: IEEE Transactions on Robotics 29.3 (2013), pp. 602– 614
work page 2013
-
[11]
The Simplest Walking Robot: A Bipedal Robot with One Actuator and Two Rigid Bodies
James Kyle et al. “The Simplest Walking Robot: A Bipedal Robot with One Actuator and Two Rigid Bodies”. In: 2023 IEEE-RAS 22nd International Con- ference on Humanoid Robots (Humanoids) . IEEE. 2023, pp. 1–7
work page 2023
-
[12]
Thrust Direction Control of an Underactuated Oscillating Swimming Robot
Gedaliah Knizhnik and Mark Yim. “Thrust Direction Control of an Underactuated Oscillating Swimming Robot”. In: IROS. 2021, pp. 8665–8670
work page 2021
-
[13]
Spin- Bot: An Autonomous, Externally Actuated Robot for Swarm Applications
Andrew SaLoutos and Michael Rubenstein. “Spin- Bot: An Autonomous, Externally Actuated Robot for Swarm Applications”. In: Distributed Autonomous Robotic Systems . Springer, 2019, pp. 211–224
work page 2019
-
[14]
PCBot: a Minimalist Robot Designed for Swarm Applications
Jingxian Wang and Michael Rubenstein. “PCBot: a Minimalist Robot Designed for Swarm Applications”. In: IROS. IEEE. 2022, pp. 1463–1470
work page 2022
-
[15]
An Autonomous Mobile Robot with Passive Wheels Propelled by a Single Motor
Satoshi Ito et al. “An Autonomous Mobile Robot with Passive Wheels Propelled by a Single Motor”. In: Robotics and Autonomous Systems 122 (2019), p. 103310
work page 2019
-
[16]
A Controllable Flying Vehicle with a Single Moving Part
Weixuan Zhang, Mark W Mueller, and Raffaello D’Andrea. “A Controllable Flying Vehicle with a Single Moving Part”. In: ICRA. 2016, pp. 3275–3281
work page 2016
-
[17]
Autonomous 3D Position Control for a Safe Single Motor Micro Aerial Ve- hicle
Andrew G Curtis et al. “Autonomous 3D Position Control for a Safe Single Motor Micro Aerial Ve- hicle”. In: IEEE Robotics and Automation Letters (2023)
work page 2023
-
[18]
Spherical Rolling Robots - Design, Modeling, and Control: a Systematic Liter- ature Review
Aminata Diouf et al. “Spherical Rolling Robots - Design, Modeling, and Control: a Systematic Liter- ature Review”. In: Robotics and Autonomous Systems (2024), p. 104657
work page 2024
-
[19]
Motion Control of a Spherical Mobile Robot
Aarne Halme, Torsten Schonberg, and Yan Wang. “Motion Control of a Spherical Mobile Robot”. In: Proceedings of 4th IEEE International Workshop on Advanced Motion Control . V ol. 1. IEEE. 1996, pp. 259–264
work page 1996
-
[20]
Introducing August: a Novel Strategy for an Omnidirectional Spherical Rolling Robot
Puyan Mojabi et al. “Introducing August: a Novel Strategy for an Omnidirectional Spherical Rolling Robot”. In: ICRA. V ol. 4. IEEE. 2002, pp. 3527–3533
work page 2002
-
[21]
Design and Motion Control of a Spherical Robot with Control Moment Gyroscope
Jiazhen Chen et al. “Design and Motion Control of a Spherical Robot with Control Moment Gyroscope”. In: 3rd International Conference on Systems and In- formatics (ICSAI) . IEEE. 2016, pp. 114–120
work page 2016
-
[22]
Spher- ical Rolling Robot: A Design and Motion Planning Studies
Shourov Bhattacharya and Sunil K Agrawal. “Spher- ical Rolling Robot: A Design and Motion Planning Studies”. In: IEEE Transactions on Robotics and Automation 16.6 (2000), pp. 835–839
work page 2000
-
[23]
Self Locomotion of a Spherical Rolling Robot Using a Novel Deformable Pneumatic Method
Keith W Wait, Philip J Jackson, and Lanny S Smoot. “Self Locomotion of a Spherical Rolling Robot Using a Novel Deformable Pneumatic Method”. In: ICRA. IEEE. 2010, pp. 3757–3762
work page 2010
-
[24]
On the Dy- namics of a Rolling Ball Actuated by Internal Point Masses
Vakhtang Putkaradze and Stuart Rogers. “On the Dy- namics of a Rolling Ball Actuated by Internal Point Masses”. In: Meccanica 53 (2018), pp. 3839–3868
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.