Dynamics-Encoded Deep Learning for Robust System Identification and Parameter Estimation
Pith reviewed 2026-05-23 19:34 UTC · model grok-4.3
The pith
Deep learning models that encode numerical schemes for differential equations enable robust dynamics discovery and parameter estimation from corrupt observations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
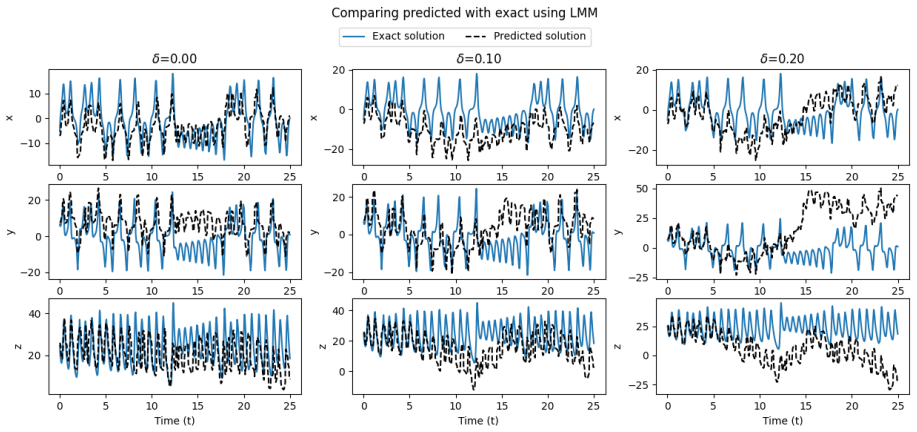
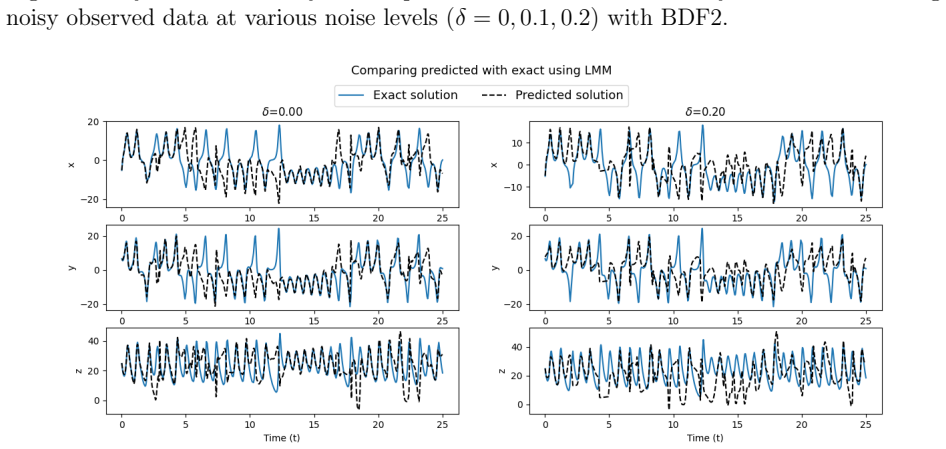
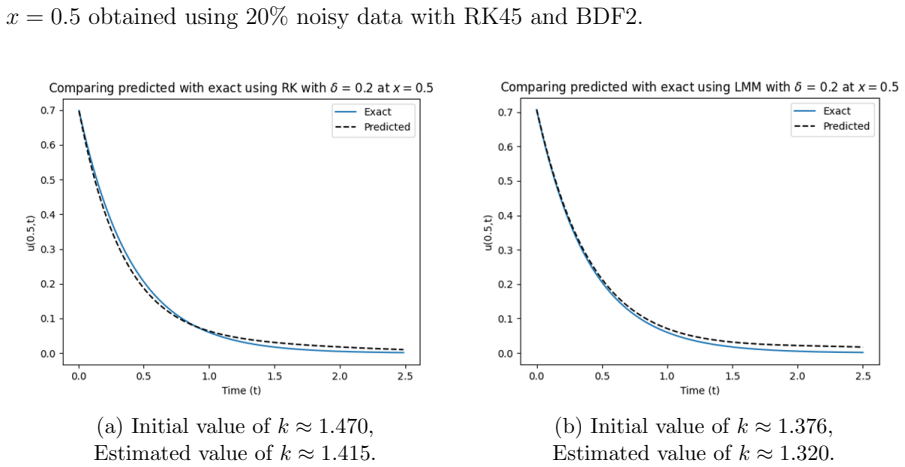
Encoding available information about system dynamics into deep learning architectures, by incorporating different assumptions on known inputs and desired outputs and pairing them with numerical integration schemes, allows accurate model predictions and physical parameter estimates from corrupt observations in oscillatory and chaotic dynamical systems.
What carries the argument
Dynamics-encoded deep learning architectures that integrate numerical schemes from the Runge-Kutta and linear multistep families to enforce consistency with the underlying differential equations.
If this is right
- Data-driven models can predict system behavior accurately despite corrupt observations.
- Physical parameters can be estimated reliably without requiring clean data.
- Appropriate choices of numerical method and discretization order improve both prediction and estimation accuracy.
- The approach works on both oscillatory and chaotic dynamics test problems.
Where Pith is reading between the lines
- The same encoding strategy could be applied to other classes of dynamical systems with different known physics constraints.
- Combining multiple numerical schemes within one architecture might further stabilize training on very noisy data.
- The method could reduce reliance on large volumes of high-quality training data in scientific applications.
Load-bearing premise
That embedding assumptions on inputs and outputs into deep learning architectures will yield robust performance when paired with appropriate numerical discretization schemes.
What would settle it
A new test problem with corrupt observations where the encoded models produce inaccurate dynamics predictions or parameter estimates even after choosing suitable numerical schemes and method orders.
Figures





read the original abstract
Incorporating a priori physics knowledge into machine learning leads to more robust and interpretable algorithms. In this work, we combine deep learning techniques and classic numerical methods for differential equations to address two challenging missing physics problems in dynamical systems theory: dynamics discovery and parameter estimation. The presented methods encode available information relating to the system dynamics into deep learning architectures, incorporating different assumptions on the known inputs and desired outputs in each case. Results demonstrate the effectiveness of the proposed approaches in making data-driven model predictions given corrupt system observations on a suite of test problems exhibiting oscillatory and chaotic dynamics. When comparing the performance of various numerical schemes, such as the Runge-Kutta and linear multistep families of methods, we observe promising results in predicting the system dynamics and estimating physical parameters, given appropriate choices of spatial and temporal discretization schemes and numerical method orders.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes dynamics-encoded deep learning architectures that integrate classic numerical methods (Runge-Kutta and linear multistep families) for differential equations to address dynamics discovery and parameter estimation from corrupt observations. Different assumptions on known inputs and desired outputs are encoded into the architectures for each task. Effectiveness is demonstrated on a suite of test problems with oscillatory and chaotic dynamics, with promising results reported when appropriate spatial/temporal discretization schemes and numerical method orders are selected.
Significance. If substantiated with detailed metrics and ablations, the explicit encoding of numerical-scheme assumptions into DL models offers a concrete route to more interpretable and robust system identification. The side-by-side comparison of Runge-Kutta versus linear multistep families is a constructive contribution that could guide future physics-informed architectures. However, the dependence on 'appropriate choices' of scheme and order limits the immediate claim of general robustness across corrupt-observation regimes.
major comments (1)
- [Abstract] Abstract: the central claim of 'robust' data-driven predictions from corrupt observations is qualified by the phrase 'given appropriate choices of spatial and temporal discretization schemes and numerical method orders'. This makes scheme selection load-bearing for the advertised robustness; if the manuscript does not contain systematic sensitivity studies across orders/schemes on the same test problems or a procedure for identifying suitable schemes without oracle knowledge, the encoding of dynamics assumptions alone does not deliver the claimed robustness.
minor comments (1)
- [Abstract] The abstract does not explicitly separate the input/output assumptions used for the dynamics-discovery task versus the parameter-estimation task; a short clarifying sentence would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive review. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim of 'robust' data-driven predictions from corrupt observations is qualified by the phrase 'given appropriate choices of spatial and temporal discretization schemes and numerical method orders'. This makes scheme selection load-bearing for the advertised robustness; if the manuscript does not contain systematic sensitivity studies across orders/schemes on the same test problems or a procedure for identifying suitable schemes without oracle knowledge, the encoding of dynamics assumptions alone does not deliver the claimed robustness.
Authors: The abstract intentionally qualifies the robustness claim to match the empirical results: performance improves when the encoded numerical scheme is well-matched to the dynamics. The manuscript does not assert that dynamics encoding alone guarantees robustness independent of scheme and order selection. Instead, it shows that different families (Runge-Kutta and linear multistep) can be encoded and compares their performance side-by-side on the same oscillatory and chaotic test problems with corrupt observations. These comparisons illustrate the effect of scheme family and order but do not constitute an exhaustive sensitivity sweep over every order for every problem. No automatic, oracle-free procedure for scheme selection is developed, as that would require additional meta-learning machinery outside the paper's scope. We will revise the abstract to state the conditions of applicability more explicitly and to avoid any implication of unconditional robustness. revision: yes
Circularity Check
No significant circularity; derivation self-contained
full rationale
The paper encodes known dynamics assumptions into DL architectures for system ID and parameter estimation, then reports empirical performance on oscillatory/chaotic test problems using standard numerical schemes (Runge-Kutta, linear multistep). No load-bearing step reduces by construction to its own inputs, no self-citation chain justifies a uniqueness claim, and no fitted parameter is relabeled as an independent prediction. The central results rest on external test-suite validation rather than tautological re-derivation of the inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
S. L. Brunton, J. L. Proctor, and J. N. Kutz. Discovering governing equations from data by sparse identification of nonlinear dynamical systems.Proceedings of the National Academy of Sciences, 113(15):3932–3937, 2016
work page 2016
-
[2]
S. H. Rudy, J. N. Kutz, and S. L. Brunton. Deep learning of dynamics and signal- noise decomposition with time-stepping constraints. Journal of Computational Physics , 396:483–506, 2019
work page 2019
-
[3]
M. Raissi. Deep hidden physics models: Deep learning of nonlinear partial differential equations. J. Mach. Learn. Res. , 19(1):932–955, 2018
work page 2018
-
[4]
Multistep Neural Networks for Data-driven Discovery of Nonlinear Dynamical Systems
M. Raissi, P. Perdikaris, and G. E. Karniadakis. Multistep neural networks for data- driven discovery of nonlinear dynamical systems. arXiv.org [Preprint], 2018. https: //arxiv.org/abs/1801.01236
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[5]
R. Tipireddy, P. Perdikaris, P. Stinis, and A. M. Tartakovsky. Multistep and continuous physics-informed neural network methods for learning governing equations and consti- tutive relations. Journal of Machine Learning for Modeling and Computing , 3(2):23–46, 2022. 22
work page 2022
- [6]
-
[7]
L. Lu, P. Jin, G. Pang, Z. Zhang, and G. E. Karniadakis. Learning nonlinear operators via DeepONet based on the universal approximation theorem of operators. Nature Machine Intelligence, 3(3):218–229, 2021
work page 2021
-
[8]
D. N. Tanyu, J. Ning, T. Freudenberg, N. Heilenk¨ otter, A. Rademacher, U. Iben, and P. Maass. Deep learning methods for partial differential equations and related parameter identification problems. Inverse Problems, 39(10):103001, 2023
work page 2023
-
[9]
N. Baker, F. Alexander, T. Bremer, A. Hagberg, Y. Kevrekidis, H. Najm, M. Parashar, A. Patra, J. Sethian, S. Wild, K. Willcox, and S. Lee. Workshop report on basic research needs for scientific machine learning: Core technologies for artificial intelligence. Technical report, U. S. Department of Energy Office of Science, Advanced Scientific Computing Rese...
work page 2019
-
[10]
G. E. Karniadakis, I. G. Kevrekidis, L. Lu, P. Perdikaris, S. Wang, and L. Yang. Physics- informed machine learning. Nature Reviews Physics, 3(6):422–440, 2021
work page 2021
- [11]
-
[12]
J. Willard, X. Jia, S. Xu, M. Steinbach, and V. Kumar. Integrating scientific knowledge with machine learning for engineering and environmental systems.ACM Comput. Surv., 55(4):1–37, 2022
work page 2022
-
[13]
L. Lu, X. Meng, Z. Mao, and G. E. Karniadakis. DeepXDE: A deep learning library for solving differential equations. SIAM Review, 63(1):208–228, 2021
work page 2021
-
[14]
V. Churchill, Y. Chen, Z. Xu, and D. Xiu. DNN modeling of partial differential equations with incomplete data. Journal of Computational Physics , 493:112502, 2023
work page 2023
-
[15]
S. Wang, Y. Teng, and P. Perdikaris. Understanding and mitigating gradient flow pathologies in physics-informed neural networks. SIAM Journal on Scientific Comput- ing, 43(5):A3055–A3081, 2021
work page 2021
-
[16]
A. D. Jagtap, E. Kharazmi, and G. E. Karniadakis. Conservative physics-informed neu- ral networks on discrete domains for conservation laws: Applications to forward and in- verse problems. Computer Methods in Applied Mechanics and Engineering , 365:113028, 2020
work page 2020
-
[17]
A. D. Jagtap and G. E. Karniadakis. Extended physics-informed neural networks (XPINNs): A generalized space-time domain decomposition based deep learning frame- work for nonlinear partial differential equations. Communications in Computational Physics, 28(5):2002–2041, 2020. 23
work page 2002
-
[18]
B. Moseley, A. Markham, and T. Nissen-Meyer. Finite basis physics-informed neural networks (FBPINNs): a scalable domain decomposition approach for solving differential equations. Advances in Computational Mathematics , 49(4):62, 2023
work page 2023
- [19]
-
[20]
K. L. Lim, R. Dutta, and M. Rotaru. Physics informed neural network using finite difference method. In 2022 IEEE International Conference on Systems, Man, and Cybernetics, pages 1828–1833, 2022
work page 2022
-
[21]
P.-H. Chiu, J. C. Wong, C. Ooi, M. H. Dao, and Y.-S. Ong. CAN-PINN: A fast physics- informed neural network based on coupled-automatic–numerical differentiation method. Computer Methods in Applied Mechanics and Engineering , 395:114909, 2022
work page 2022
- [22]
-
[23]
W. Zhai, D. Tao, and Y. Bao. Parameter estimation and modeling of nonlinear dy- namical systems based on Runge–Kutta physics-informed neural network. Nonlinear Dynamics, 111:21117–21130, 2023
work page 2023
-
[24]
Z. Chen, Y. Liu, and H. Sun. Physics-informed learning of governing equations from scarce data. Nature Communications, 12(1):6136, 2021
work page 2021
-
[25]
R. T. Q. Chen, Y. Rubanova, J. Bettencourt, and D. Duvenaud. Neural ordinary differential equations. In S. Bengio, H. Wallach, H. Larochelle, K. Grauman, N. Cesa- Bianchi, and R. Garnett, editors, Advances in Neural Information Processing Systems 31 (NeurIPS 2018) , page 6571–6583, 2018
work page 2018
-
[26]
J. Kaipio and E. Somersalo. Statistical and Computational Inverse Problems . Springer, New York, 2005
work page 2005
-
[27]
F. A. C. Viana and A. K. Subramaniyan. A survey of Bayesian calibration and physics- informed neural networks in scientific modeling. Archives of Computational Methods in Engineering, 28(5):3801–3830, 2021
work page 2021
- [28]
-
[29]
M. L. Johnson and L. M. Faunt. Parameter estimation by least-squares methods. Meth- ods Enzymol, 210:1–37, 1992
work page 1992
-
[30]
H. T. Banks, S. Hu, and W. C. Thompson. Modeling and Inverse Problems in the Presence of Uncertainty. CRC Press, New York, 2014
work page 2014
- [31]
- [32]
- [33]
-
[34]
G. Evensen. The ensemble Kalman filter for combined state and parameter estimation. IEEE Control Syst Mag , 29:83–104, 2009
work page 2009
- [35]
-
[36]
A. Arnold. When artificial parameter evolution gets real: Particle filtering for time- varying parameter estimation in deterministic dynamical systems. Inverse Problems, 39(1):014002, 2023
work page 2023
- [37]
- [38]
-
[39]
M. Abadi and G. D. Plotkin. A simple differentiable programming language. Proc. ACM Program. Lang., 4(POPL), 12 2019
work page 2019
-
[40]
J. Bezanson, A. Edelman, S. Karpinski, and V. B. Shah. Julia: A fresh approach to numerical computing. SIAM Review, 59(1):65–98, 2017
work page 2017
-
[41]
R. Frostig, M. J. Johnson, and C. Leary. Compiling machine learning programs via high-level tracing. Systems for Machine Learning , 4(9), 2018
work page 2018
-
[42]
J. Bradbury, R. Frostig, P. Hawkins, M. J. Johnson, C. Leary, D. Maclaurin, G. Necula, A. Paszke, J. V. Plas, S. Wanderman-Milne, and Q. Zhang. JAX: composable transfor- mations of Python+NumPy programs, 2018. https://github.com/google/jax
work page 2018
-
[43]
N. Thuerey, P. Holl, M. Mueller, P. Schnell, F. Trost, and K. Um. Physics-based Deep Learning. WWW, 2022. https://physicsbaseddeeplearning.org
work page 2022
-
[44]
F. de Avila Belbute-Peres, K. Smith, K. Allen, J. Tenenbaum, and J. Z. Kolter. End-to-end differentiable physics for learning and control. In S. Bengio, H. Wallach, H. Larochelle, K. Grauman, N. Cesa-Bianchi, and R. Garnett, editors, Advances in Neural Information Processing Systems 31 (NeurIPS 2018) , pages 7178–7189, 2018
work page 2018
-
[45]
B. Ramsundar, D. Krishnamurthy, and V. Viswanathan. Differentiable physics: A position piece. arXiv.org [Preprint], 2021. https://arxiv.org/abs/2109.07573. 25
-
[46]
Universal Differential Equations for Scientific Machine Learning
C. Rackauckas, Y. Ma, J. Martensen, C. Warner, K. Zubov, R. Supekar, D. Skinner, A. Ramadhan, and A. Edelman. Universal differential equations for scientific machine learning. arXiv.org [Preprint], 2021. https://arxiv.org/abs/2001.04385
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[47]
A. G. Baydin, B. A. Pearlmutter, A. A. Radul, and J. M. Siskind. Automatic dif- ferentiation in machine learning: A survey. J. Mach. Learn. Res. , 18(1):5595–5637, 2017
work page 2017
-
[48]
W. Grathwohl, R. T. Q. Chen, J. Bettencourt, and D. Duvenaud. Scalable reversible generative models with free-form continuous dynamics. In International Conference on Learning Representations, pages 1–14, 2019
work page 2019
-
[49]
T. Zhang, Z. Yao, A. Gholami, J. E. Gonzalez, K. Keutzer, M. W. Mahoney, and G. Biros. ANODEV2: A coupled neural ODE framework. In H. Wallach, H. Larochelle, A. Beygelzimer, F. d 'Alch´ e-Buc, E. Fox, and R. Garnett, editors, Advances in Neural Information Processing Systems 32 (NeurIPS 2019) , pages 5151–5161, 2019
work page 2019
-
[50]
K. M. Choromanski, J. Q. Davis, V. Likhosherstov, X. Song, J.-J. Slotine, J. Varley, H. Lee, A. Weller, and V. Sindhwani. Ode to an ODE. In H. Larochelle, M. Ran- zato, R. Hadsell, M. F. Balcan, and H. Lin, editors, Advances in Neural Information Processing Systems 33 (NeurIPS 2020) , pages 3338–3350, 2020
work page 2020
-
[51]
P. Kidger, J. Morrill, J. Foster, and T. Lyons. Neural controlled differential equations for irregular time series. In H. Larochelle, M. Ranzato, R. Hadsell, M. F. Balcan, and H. Lin, editors, Advances in Neural Information Processing Systems 33 (NeurIPS 2020), pages 6696–6707, 2020
work page 2020
-
[52]
E. De Brouwer, J. Simm, A. Arany, and Y. Moreau. GRU-ODE-Bayes: Continuous modeling of sporadically-observed time series. In H. Wallach, H. Larochelle, A. Beygelz- imer, F. d'Alch´ e-Buc, E. Fox, and R. Garnett, editors,Advances in Neural Information Processing Systems 32 (NeurIPS 2019) , pages 7379–7390, 2019
work page 2019
-
[53]
P. Goyal and P. Benner. Neural ordinary differential equations with irregular and noisy data. Royal Society Open Science, 10(7):221475, 2023
work page 2023
-
[54]
L. Yang, X. Meng, and G. E. Karniadakis. B-PINNs: Bayesian physics-informed neural networks for forward and inverse PDE problems with noisy data. Journal of Computa- tional Physics, 425:109913, 2021
work page 2021
-
[55]
P. Pilar and N. Wahlstr¨ om. Physics-informed neural networks with unknown mea- surement noise. In Alessandro Abate, Mark Cannon, Kostas Margellos, and Antonis Papachristodoulou, editors, Proceedings of the 6th Annual Learning for Dynamics &; Control Conference, volume 242 of Proceedings of Machine Learning Research , pages 235–247. PMLR, 15–17 Jul 2024
work page 2024
-
[56]
J. O’Leary, J. A. Paulson, and A. Mesbah. Stochastic physics-informed neural ordinary differential equations. Journal of Computational Physics , 468:111466, 2022. 26
work page 2022
-
[57]
L. S. Pontryagin. Mathematical Theory of Optimal Processes . Taylor & Francis, 1987
work page 1987
-
[58]
D. P. Kingma and J. Ba. Adam: A method for stochastic optimization. arXiv.org [Preprint], 2017. https://arxiv.org/abs/1412.6980
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[59]
D. C. Liu and J. Nocedal. On the limited memory BFGS method for large scale opti- mization. Mathematical Programming, 45(1):503–528, 1989
work page 1989
-
[60]
PyTorch: An Imperative Style, High-Performance Deep Learning Library
A. Paszke, S. Gross, F. Massa, A. Lerer, J. Bradbury, G. Chanan, T. Killeen, Z. Lin, N. Gimelshein, L. Antiga, A. Desmaison, A. K¨ opf, E. Yang, Z. DeVito, M. Raison, A. Tejani, S. Chilamkurthy, B. Steiner, L. Fang, J. Bai, and S. Chintala. PyTorch: An imperative style, high-performance deep learning library. arXiv.org [Preprint], 2019. https://arxiv.org/...
work page internal anchor Pith review Pith/arXiv arXiv 2019
- [61]
- [62]
-
[63]
A. L. Hodgkin and A. F. Huxley. A quantitative description of membrane current and its application to conduction and excitation in nerve. The Journal of Physiology , 117(4):500–544, 1952
work page 1952
-
[64]
E. N. Lorenz. Deterministic nonperiodic flow. Journal of Atmospheric Sciences , 20(2):130–141, 1963
work page 1963
-
[65]
K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learning for image recognition. arXiv.org [Preprint], 2015. https://arxiv.org/abs/1512.03385
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[66]
M. H. Holmes. Introduction to the Foundations of Applied Mathematics . Springer, Cham, 2019
work page 2019
-
[67]
N. K. Madsen. The method of lines for the numerical solution of partial differential equations. SIGNUM Newsl., 10(4):5–7, 1975. 27 Supplementary Materials: Integrating Physics-Informed Deep Learning and Numerical Methods for Robust Dynamics Discovery and Parameter Estimation Caitlin Ho, Andrea Arnold* Department of Mathematical Sciences, Worcester Polytec...
work page 1975
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.