Proximal Gradient Dynamics and Feedback Control for Equality-Constrained Composite Optimization
Pith reviewed 2026-05-22 23:50 UTC · model grok-4.3
The pith
The proportional-integral proximal gradient dynamics have equilibria matching the stationary points of equality-constrained composite optimization problems and converge linearly-exponentially when constraints are affine.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
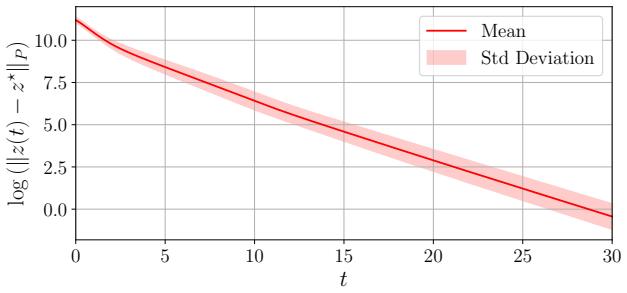
The stationary points of the equality-constrained composite minimization problem are equivalent to the equilibria of the PI-PGD. For affine constraints, the dynamics exhibit linear-exponential convergence to the equilibrium, with the distance to equilibrium bounded by a function that decreases linearly initially and then exponentially.
What carries the argument
The proportional-integral proximal gradient dynamics (PI-PGD), a closed-loop feedback system treating Lagrange multipliers as control inputs and decision variables as states.
If this is right
- Equivalence holds between optimization stationary points and dynamical system equilibria for any equality constraints.
- Linear-exponential convergence is guaranteed for affine equality constraints using contraction theory.
- The dynamics handle composite objectives that include regularization terms.
- Numerical results confirm the behavior on representative affine problems.
Where Pith is reading between the lines
- The feedback control perspective could enable real-time implementations in dynamic environments.
- Further analysis might extend the contraction guarantees to certain classes of nonlinear constraints.
- The proportional and integral gains offer tunable parameters that could improve practical convergence speed.
Load-bearing premise
The comprehensive convergence analysis holds only for affine equality constraints rather than general nonlinear ones.
What would settle it
A numerical simulation of an affine-constrained problem where the observed convergence deviates from the predicted linear-exponential rate would falsify the claim.
Figures









read the original abstract
This paper studies equality-constrained composite minimization problems. This class of problems, capturing regularization terms and inequality constraints, naturally arises in a wide range of engineering and machine learning applications. To tackle these optimization problems, inspired by recent results, we introduce the \emph{proportional--integral proximal gradient dynamics} (PI--PGD): a closed-loop system where the Lagrange multipliers are control inputs and states are the problem decision variables. First, we establish the equivalence between the stationary points of the minimization problem and the equilibria of the PI--PGD. Then for the case of affine constraints, by leveraging tools from contraction theory we give a comprehensive convergence analysis for the dynamics, showing linear--exponential convergence towards the equilibrium. That is, the distance between each solution and the equilibrium is upper bounded by a function that first decreases linearly and then exponentially. Our findings are illustrated numerically on a set of representative examples, which include an exploratory application to nonlinear equality constraints.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces proportional-integral proximal gradient dynamics (PI-PGD) for equality-constrained composite minimization problems. It proves equivalence between the stationary points of the optimization problem and the equilibria of the PI-PGD system. For the special case of affine equality constraints, contraction theory is used to establish linear-exponential convergence of the trajectories to equilibrium. Numerical examples are provided for both affine and (exploratory) nonlinear cases.
Significance. If the claims hold, the work supplies a control-theoretic dynamical-systems treatment of composite optimization with explicit rate guarantees under affine constraints. The explicit scoping of the convergence result to affine constraints and the use of standard contraction-theory tools are positive features; the equivalence result for the general (possibly nonlinear) case is also cleanly stated.
major comments (2)
- [Convergence analysis section] Convergence analysis (affine case): the linear-exponential rate is obtained via contraction theory, yet the theorem statement does not list the required Lipschitz constants on the proximal operator or the strong-convexity modulus of the objective that are needed for the contraction mapping to apply. These conditions are standard in the field but must be stated explicitly for the claim to be verifiable.
- [Equivalence theorem] Equivalence result: while the stationary-point / equilibrium equivalence is asserted for general nonlinear equality constraints, the subsequent convergence analysis is restricted to affine constraints; the manuscript should clarify whether any intermediate steps in the equivalence proof rely on affinity or remain valid without it.
minor comments (2)
- [Abstract] The abstract and introduction should explicitly flag that the linear-exponential rate holds only for affine constraints, to avoid any misreading of the scope.
- [Problem formulation] Notation for the integral action and the projection onto the constraint manifold could be clarified with a short table or diagram in the problem formulation section.
Simulated Author's Rebuttal
We thank the referee for their careful reading and constructive comments. We address each major comment below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Convergence analysis section] Convergence analysis (affine case): the linear-exponential rate is obtained via contraction theory, yet the theorem statement does not list the required Lipschitz constants on the proximal operator or the strong-convexity modulus of the objective that are needed for the contraction mapping to apply. These conditions are standard in the field but must be stated explicitly for the claim to be verifiable.
Authors: We agree that the assumptions on the proximal operator's Lipschitz constant and the objective's strong-convexity modulus must be stated explicitly in the theorem for verifiability. In the revised manuscript we will update the convergence theorem statement to list these conditions explicitly. revision: yes
-
Referee: [Equivalence theorem] Equivalence result: while the stationary-point / equilibrium equivalence is asserted for general nonlinear equality constraints, the subsequent convergence analysis is restricted to affine constraints; the manuscript should clarify whether any intermediate steps in the equivalence proof rely on affinity or remain valid without it.
Authors: The equivalence proof (Theorem 1) relies only on the proximal operator definition and KKT stationarity conditions; no step uses affinity of the constraints. The result holds for general nonlinear equalities. We will add an explicit clarifying sentence in the revised manuscript. revision: yes
Circularity Check
No significant circularity
full rationale
The derivation establishes equivalence between KKT stationary points and PI-PGD equilibria via standard proximal-operator and Lagrange-multiplier definitions drawn from prior literature, then applies contraction-theory contraction metrics to obtain linear-exponential rates exclusively for affine constraints. No step reduces a claimed prediction or uniqueness result to a fitted parameter, self-citation loop, or ansatz smuggled from the authors' own prior work; the nonlinear-constraint case is explicitly labeled exploratory and does not support the central claim. The argument is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Forward citations
Cited by 1 Pith paper
-
A Unified Control-Theoretic Framework for Saddle-Point Dynamics in Constrained Optimization
A PID feedback law on dual variables induces a unified family of saddle-point flows for constrained optimization, with explicit global exponential convergence guarantees under convexity and affine constraints.
Reference graph
Works this paper leans on
-
[1]
A. Allibhoy and J. Cort´ es. Control barrier function-based design of gradient flows for constrained nonlinear program- ming. 69(6), 2024.doi:10.1109/TAC.2023.3306492
-
[2]
K. J. Arrow, L. Hurwicz, and H. Uzawa, editors.Studies in Linear and Nonlinear Programming. Stanford University Press, 1958
work page 1958
-
[3]
H. H. Bauschke and P. L. Combettes.Convex Analysis and Monotone Operator Theory in Hilbert Spaces. 2 edition, 2017, ISBN 978-3-319-48310-8
work page 2017
-
[4]
Beck.First-Order Methods in Optimization
A. Beck.First-Order Methods in Optimization. 2017, ISBN 978-1-61197-498-0
work page 2017
-
[5]
G. Bianchin, J. Cort´ es, J. I. Poveda, and E. Dall’Anese. Time-varying optimization of LTI systems via projected primal-dual gradient flows.IEEE Transactions on Control of Network Systems, 9(1):474–486, 2022.doi:10.1109/ TCNS.2021.3112762
-
[6]
N. Bonneel, M. Van De Panne, S. Paris, and W. Heidrich. Displacement interpolation using Lagrangian mass transport. InSIGGRAPH Asia conference, number 158, pages 1–12, 2011.doi:10.1145/2024156.2024192
-
[7]
Bullo.Contraction Theory for Dynamical Systems
F. Bullo.Contraction Theory for Dynamical Systems. Kindle Direct Publishing, 1.2 edition, 2024, ISBN 979- 8836646806. URL: https://fbullo.github.io/ctds
work page 2024
-
[8]
V. Centorrino, A. Davydov, A. Gokhale, G. Russo, and F. Bullo. On weakly contracting dynamics for convex optimization. 8:1745–1750, 2024.doi:10.1109/LCSYS.2024.3414348
-
[9]
V. Centorrino, A. Gokhale, A. Davydov, G. Russo, and F. Bullo. Euclidean contractivity of neural networks with symmetric weights. 7:1724–1729, 2023.doi:10.1109/LCSYS.2023.3278250
-
[10]
V. Cerone, S. M. Fosson, S. Pirrera, and D. Regruto. A feedback control approach to convex optimization with inequality constraints. In2024 IEEE 63rd Conference on Decision and Control (CDC), pages 2538–2543, 2024. doi:10.1109/CDC56724.2024.10885825
-
[11]
V. Cerone, S. M. Fosson, S. Pirrera, and D. Regruto. A new framework for constrained optimization via feedback control of lagrange multipliers.IEEE Transactions on Automatic Control, page 1–16, 2025.doi:10.1109/tac.2025. 3568651
-
[12]
S. Coogan. A contractive approach to separable Lyapunov functions for monotone systems. 106:349–357, 2019. doi:10.1016/j.automatica.2019.05.001
-
[13]
M. Cuturi. Sinkhorn distances: Lightspeed Computation of Optimal Transport. InAdvances in Neural Information Processing Systems, volume 26, pages 2292–2300, 2013
work page 2013
-
[14]
A. Davydov, V. Centorrino, A. Gokhale, G. Russo, and F. Bullo. Time-varying convex optimization: A contraction and equilibrium tracking approach. 70:7446–7460, 2025.doi:10.1109/tac.2025.3576043
-
[15]
A. Davydov, A. V. Proskurnikov, and F. Bullo. Non-Euclidean contraction analysis of continuous-time neural net- works. 70(1), 2025.doi:10.1109/TAC.2024.3422217
-
[16]
N. K. Dhingra, S. Z. Khong, and M. R. Jovanovi´ c. The proximal augmented Lagrangian method for nonsmooth composite optimization. 64(7):2861–2868, 2019.doi:10.1109/TAC.2018.2867589
-
[17]
R. Flamary, N. Courty, A. Gramfort, M. Z. Alaya, et al. POT: Python optimal transport.Journal of Machine Learning Research, 22(78):1–8, 2021
work page 2021
-
[18]
A. Hauswirth, Z. He, S. Bolognani, G. Hug, and F. D¨ orfler. Optimization algorithms as robust feedback controllers. Annual Reviews in Control, 57:100941, 2024.doi:10.1016/j.arcontrol.2024.100941
-
[19]
H. D. Nguyen, T. L. Vu, K. Turitsyn, and J.-J. E. Slotine. Contraction and robustness of continuous time primal-dual dynamics. 2(4):755–760, 2018.doi:10.1109/LCSYS.2018.2847408
-
[20]
I. K. Ozaslan and M. R. Jovanovi´ c. On the global exponential stability of primal-dual dynamics for convex problems with linear equality constraints. pages 210–215, San Diego, USA, 2023.doi:10.23919/ACC55779.2023.10156504
-
[21]
N. Parikh and S. Boyd. Proximal algorithms.Foundations and Trends in Optimization, 1(3):127–239, 2014.doi: 10.1561/2400000003. 17
-
[22]
Computational Optimal Transport: With Ap- plications to Data Science
G. Peyr´ e and M. Cuturi. Computational optimal transport: With applications to data science.Foundations and Trends in Machine Learning, 11(5-6):355–607, 2019.doi:10.1561/2200000073
- [23]
- [24]
-
[25]
G. Russo, M. Di Bernardo, and E. D. Sontag. Global entrainment of transcriptional systems to periodic inputs. 6(4):e1000739, 2010.doi:10.1371/journal.pcbi.1000739
-
[26]
T. Str¨ om. On logarithmic norms.SIAM Journal on Numerical Analysis, 12(5):741–753, 1975.doi:10.1137/0712055
- [27]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.