J-PARSE: Jacobian-based Projection Algorithm for Resolving Singularities Effectively in Inverse Kinematic Control of Serial Manipulators
Pith reviewed 2026-05-22 18:21 UTC · model grok-4.3
The pith
J-PARSE resolves singularities in inverse kinematics by constructing a Safety Jacobian and projecting velocities onto safe directions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
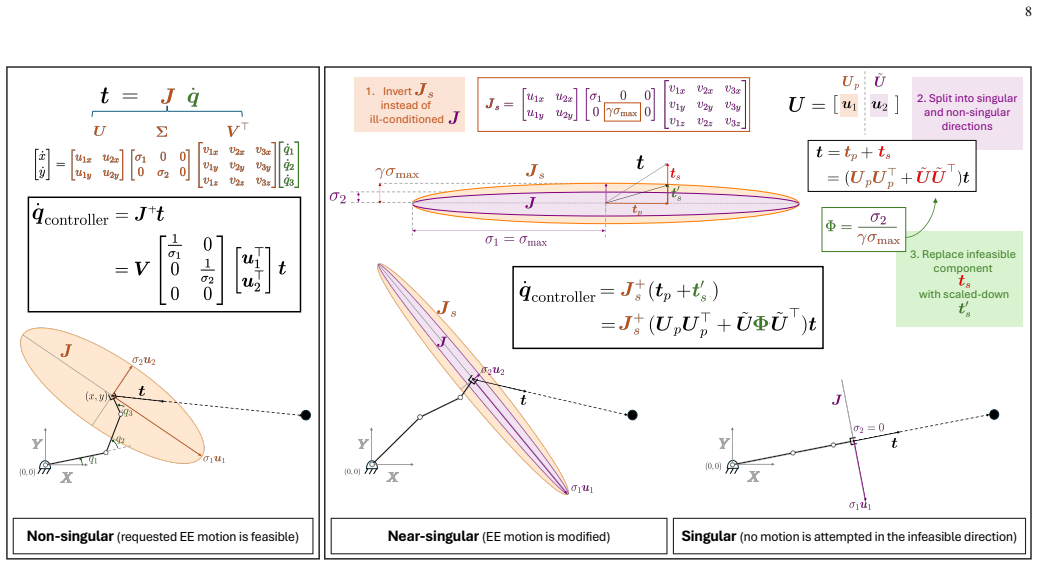
J-PARSE interprets the commanded end-effector velocity component-wise according to instantaneous mobility, replaces the original Jacobian with a Safety Jacobian whose manipulability ellipsoid aspect ratio stays above a chosen threshold, projects the command onto non-singular and singular subspaces, damps the singular projection by a factor derived from the threshold, and applies the right inverse of the non-singular Safety Jacobian; the resulting control law guarantees continuous signals and the stated stability properties when joint limits and collisions are absent.
What carries the argument
The Safety Jacobian, a modified Jacobian matrix constructed to keep the aspect ratio of the manipulability ellipsoid above a threshold, which supports safe projection and right-inverse computation.
If this is right
- Safe entry into and exit from low-rank configurations without abrupt velocity changes.
- Asymptotic stability when the target pose lies inside the reachable workspace.
- Bounded stability when the target pose lies outside the reachable workspace.
- Higher accuracy than prior methods when targets coincide with or pass through singular configurations.
- Expanded usable workspace for teleoperation, visual servoing, and learning-based control.
Where Pith is reading between the lines
- The projection scaling may generalize to manipulators whose singularities arise from different geometric causes if the aspect-ratio threshold can be tuned accordingly.
- Integration with joint-limit avoidance or collision-avoidance layers would be a direct next step once the core singularity handling is verified on hardware.
- Because the method operates at the velocity level, it could be combined with existing acceleration or torque controllers without redesigning the inner loop.
- Empirical measurement of tracking error versus threshold value on a physical arm would quantify the practical trade-off between smoothness and speed near singularities.
Load-bearing premise
A Safety Jacobian can always be formed that respects the aspect-ratio threshold yet still yields a valid continuous control signal after projection and right-inverse steps.
What would settle it
A controlled experiment or simulation in which a manipulator commanded through a known singular pose using J-PARSE produces a discontinuous joint-velocity command or diverges from the target trajectory.
Figures












read the original abstract
J-PARSE is an algorithm for smooth first-order inverse kinematic control of a serial manipulator near kinematic singularities. The commanded end-effector velocity is interpreted component-wise, according to the available mobility in each dimension of the task space. First, a substitute "Safety" Jacobian matrix is created, keeping the aspect ratio of the manipulability ellipsoid above a threshold value. The desired motion is then projected onto non-singular and singular directions, and the latter projection scaled down by a factor informed by the threshold value. A right-inverse of the non-singular Safety Jacobian is applied to the modified command. In the absence of joint limits and collisions, this ensures safe transition into and out of low-rank configurations, guaranteeing asymptotic stability for reaching target poses within the workspace, and stability for those outside. Velocity control with J-PARSE is benchmarked against approaches from the literature, and shows high accuracy in reaching and leaving singular target poses. By expanding the available workspace of manipulators, the algorithm finds applications in teleoperation, servoing, and learning. Videos and code are available at https://jparse-manip.github.io/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes J-PARSE, a Jacobian-based projection algorithm for smooth first-order inverse kinematic control of serial manipulators near singularities. It constructs a substitute 'Safety Jacobian' to maintain the manipulability ellipsoid aspect ratio above a user-selected threshold, projects the desired end-effector velocity onto non-singular and singular directions (scaling the latter by a factor informed by the threshold), and applies the right-inverse of the modified Jacobian. In the absence of joint limits and collisions, the method is claimed to ensure safe transitions into and out of low-rank configurations, guaranteeing asymptotic stability for target poses inside the workspace and stability for those outside. Benchmarking against literature methods reports high accuracy in reaching and leaving singular poses, with applications in teleoperation, servoing, and learning; code and videos are provided.
Significance. If the continuity of the composite map and the stability guarantees can be rigorously established, the algorithm would meaningfully expand the usable workspace of serial manipulators by enabling reliable operation near singularities. The open release of code and demonstration videos is a clear strength that supports reproducibility and practical assessment.
major comments (2)
- [Abstract] Abstract: the central claim that the algorithm 'guarantees asymptotic stability for reaching target poses within the workspace' is asserted without any derivation, Lyapunov analysis, error bounds, or explicit handling of the threshold choice. The post-hoc scaling informed by the threshold is described at high level only, leaving open whether the composite map (Safety Jacobian formation + projection + right-inverse) remains continuous and Lipschitz at rank-drop events.
- [Algorithm description (abstract)] Paragraph describing the algorithm steps: the assumption that a Safety Jacobian can always be constructed to keep the manipulability ellipsoid aspect ratio above the chosen threshold while still allowing the subsequent projection and right-inverse steps to produce a valid, continuous control signal is stated without an explicit construction rule, pseudocode, or proof that the effective mapping stays well-defined and continuous when the original Jacobian rank changes.
minor comments (2)
- [Abstract] The abstract introduces the 'Safety Jacobian' and 'aspect ratio threshold' without a forward reference to the section where their explicit construction is defined; adding such a pointer would improve readability.
- [Abstract] Benchmarking results are summarized as 'high accuracy' but no quantitative metrics (e.g., mean error, success rate, or comparison tables) are mentioned in the abstract; including a brief numerical summary would strengthen the claim.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed review. The comments highlight important points regarding the rigor of our stability claims and the explicitness of the algorithm's continuity properties. We address each major comment below and will revise the manuscript to incorporate additional analysis, pseudocode, and proofs as outlined.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the algorithm 'guarantees asymptotic stability for reaching target poses within the workspace' is asserted without any derivation, Lyapunov analysis, error bounds, or explicit handling of the threshold choice. The post-hoc scaling informed by the threshold is described at high level only, leaving open whether the composite map (Safety Jacobian formation + projection + right-inverse) remains continuous and Lipschitz at rank-drop events.
Authors: We agree that the abstract presents the stability guarantee concisely without a full derivation. The manuscript body (Section 4) sketches the argument that the Safety Jacobian remains full-rank by construction and that the directional projection prevents unbounded joint velocities, leading to asymptotic convergence inside the workspace. However, we acknowledge the absence of an explicit Lyapunov analysis and bounds on the threshold. In the revision we will add a dedicated stability subsection deriving a Lyapunov function V = (1/2) ||e||^2 (with e the task-space error) and showing that the modified velocity command yields dot{V} <= -k ||e||^2 for a positive k dependent on the threshold. We will also prove local Lipschitz continuity of the composite map by bounding the variation of the SVD-based projection across rank transitions. revision: yes
-
Referee: [Algorithm description (abstract)] Paragraph describing the algorithm steps: the assumption that a Safety Jacobian can always be constructed to keep the manipulability ellipsoid aspect ratio above the chosen threshold while still allowing the subsequent projection and right-inverse steps to produce a valid, continuous control signal is stated without an explicit construction rule, pseudocode, or proof that the effective mapping stays well-defined and continuous when the original Jacobian rank changes.
Authors: Section 3 of the manuscript describes the Safety Jacobian via singular-value thresholding to enforce the aspect-ratio bound, followed by projection onto the resulting singular directions. We accept that an explicit algorithmic rule and continuity proof are not provided at the level of detail requested. The revision will include (i) pseudocode for the full J-PARSE procedure, (ii) a formal argument that the thresholding operator is continuous in the Jacobian entries, and (iii) a proof in the appendix that the overall map remains well-defined and continuous at rank-drop events by showing that the scaled singular values and the associated projectors converge to the limiting case. revision: yes
Circularity Check
No circularity: algorithm definition and stability claim remain independent of inputs
full rationale
The paper presents J-PARSE as a sequence of explicit matrix operations (Safety Jacobian construction to enforce aspect-ratio threshold, directional projection, scaling of singular components, and right-inverse application). The asymptotic-stability guarantee is asserted as a consequence of these operations under the stated assumptions (no joint limits or collisions), without any equation that reduces the stability result to a fitted parameter, a self-referential definition, or a load-bearing self-citation. No step matches the enumerated circularity patterns; the threshold is an explicit user parameter rather than a fitted quantity renamed as a prediction. The derivation therefore contains independent content and is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- aspect ratio threshold
axioms (1)
- domain assumption The robot is a serial manipulator operating without joint limits or collisions.
invented entities (1)
-
Safety Jacobian
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
First, a substitute “Safety” Jacobian matrix is created, keeping the aspect ratio of the manipulability ellipsoid above a threshold value. ... ts′=(σi/(γσmax))ts ... ˙qdes=Js+(tp+t′s)
-
IndisputableMonolith/Foundation/DimensionForcing.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The algorithm is designed to slow down joint speeds, informed by the nature and extent of the decreased mobility in the vicinity of singularities.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Kinova Robotics,Kinova® Jaco Assistive Robot User Guide, 2021, Accessed: 2025-10-14, p. 18. [Online]. Available: https://assistive.kinovarobotics.com/ uploads/EN-UG-007-Jaco-user-guide-R05.pdf
work page 2021
-
[2]
UFACTORY,xArm User Manual V2.0.0, 2023, Accessed: 2025-03-22, pp. 189–191. [Online]. Available: https://www.ufactory.cc/wp-content/uploads/ 2023/05/xArm-User-Manual-V2.0.0.pdf
work page 2023
-
[3]
I. A. Sucan and S. Chitta, “Moveit.” [Online]. Available: moveit.ros.org
-
[4]
B. O’Neil, A. Zelenak, and B. An- derson, “Moveit servo,” 2019. [Online]. Available: https://github.com/moveit/moveit/blob/master/ moveit ros/moveit servo/src/servo calcs.cpp#L694
work page 2019
-
[5]
A. Zelenak and V . M. Ibrahim, “Moveit 2 moveit servo,” 2023. [Online]. Available: https://github.com/moveit/moveit2/blob/main/ moveit ros/moveit servo/src/utils/common.cpp#L282
work page 2023
-
[6]
Real-time obstacle avoidance for manipu- lators and mobile robots,
O. Khatib, “Real-time obstacle avoidance for manipu- lators and mobile robots,” in1985 IEEE International Conference on Robotics and Automation Proceedings, vol. 2, Mar. 1985, pp. 500–505
work page 1985
-
[7]
Augmented haptics of manipulator kinematic condition,
T. Maneewarn and B. Hannaford, “Augmented haptics of manipulator kinematic condition,” inTelemanipulator and Telepresence Technologies VI, vol. 3840. SPIE, 1999, pp. 54–64
work page 1999
-
[8]
A framework for singularity-robust manipulator control during physical human-robot interaction,
M. G. Carmichael, D. Liu, and K. J. Waldron, “A framework for singularity-robust manipulator control during physical human-robot interaction,”The International Journal of Robotics Research, vol. 36, no. 5-7, pp. 861–876, 2017. [Online]. Available: https://doi.org/10.1177/0278364917698748
-
[9]
Fast and ro- bust inverse kinematics of serial robots using halley’s method,
S. Lloyd, R. A. Irani, and M. Ahmadi, “Fast and ro- bust inverse kinematics of serial robots using halley’s method,”IEEE Transactions on Robotics, vol. 38, no. 5, pp. 2768–2780, 2022
work page 2022
-
[10]
Manipulator control at kine- matic singularities: A dynamically consistent strategy,
K.-S. Chang and O. Khatib, “Manipulator control at kine- matic singularities: A dynamically consistent strategy,” in Proceedings 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human Robot Interaction and Cooperative Robots, vol. 3, Aug. 1995, pp. 84–88 vol.3
work page 1995
-
[11]
Learning operational space control,
J. Peters and S. Schaal, “Learning operational space control,” inRobotics Science and Systems 2006, 08 2006
work page 2006
-
[12]
Conti- nuity of varying-feature-set control laws,
N. Mansard, A. Remazeilles, and F. Chaumette, “Conti- nuity of varying-feature-set control laws,”IEEE Trans- actions on Automatic Control, vol. 54, no. 11, pp. 2493– 2505, 2009
work page 2009
-
[13]
A unified approach to integrate unilateral constraints in the stack of tasks,
N. Mansard, O. Khatib, and A. Kheddar, “A unified approach to integrate unilateral constraints in the stack of tasks,”IEEE Transactions on Robotics, vol. 25, no. 3, pp. 670–685, 2009
work page 2009
-
[14]
A continuous task transition algorithm for operational space control framework,
H. Han, J. Lee, and J. Park, “A continuous task transition algorithm for operational space control framework,” in 2012 9th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), 2012, pp. 148–152
work page 2012
-
[15]
Robot control near singularity and joint limit using a continuous task transition algorithm,
H. Han and J. Park, “Robot control near singularity and joint limit using a continuous task transition algorithm,” International Journal of Advanced Robotic Systems, vol. 10, no. 10, p. 346, 2013. [Online]. Available: https://doi.org/10.5772/56714
-
[16]
Inverse Kinematic Solu- tions With Singularity Robustness for Robot Manipulator Control,
Y . Nakamura and H. Hanafusa, “Inverse Kinematic Solu- tions With Singularity Robustness for Robot Manipulator Control,”Journal of Dynamic Systems, Measurement, and Control, vol. 108, no. 3, pp. 163–171, Sept. 1986
work page 1986
-
[17]
C. W. Wampler, “Manipulator Inverse Kinematic Solu- 20 tions Based on Vector Formulations and Damped Least- Squares Methods,”IEEE Transactions on Systems, Man, and Cybernetics, vol. 16, no. 1, pp. 93–101, Jan. 1986
work page 1986
-
[18]
Overview of damped least-squares methods for inverse kinematics of robot manipulators,
A. S. Deo and I. D. Walker, “Overview of damped least-squares methods for inverse kinematics of robot manipulators,”Journal of Intelligent and Robotic Systems, vol. 14, pp. 43–68, 1995. [Online]. Available: https://doi.org/10.1007/BF01254007
-
[19]
M. G. Carmichael, R. Khonasty, S. Aldini, and D. Liu, “Human preferences in using damping to manage sin- gularities during physical human-robot collaboration,” in 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 10 184–10 190
work page 2020
-
[20]
Automatic generation of kine- matics for a reconfigurable modular manipulator system,
L. Kelmar and P. Khosla, “Automatic generation of kine- matics for a reconfigurable modular manipulator system,” inProceedings. 1988 IEEE International Conference on Robotics and Automation, 1988, pp. 663–668 vol.2
work page 1988
-
[21]
General inverse kinematics with the error damped pseudoinverse,
S. Chan and P. Lawrence, “General inverse kinematics with the error damped pseudoinverse,” inProceedings. 1988 IEEE International Conference on Robotics and Automation, 1988, pp. 834–839 vol.2
work page 1988
-
[22]
Selectively damped least squares for inverse kinematics,
S. R. Buss and J.-S. Kim, “Selectively damped least squares for inverse kinematics,”Journal of Graphics Tools, vol. 10, pp. 37 – 49, 2005. [Online]. Available: https://api.semanticscholar.org/CorpusID:6860165
work page 2005
-
[23]
D. Vito, C. Natale, and G. Antonelli, “A comparison of damped least squares algorithms for inverse kinematics of robot manipulators * *this work was supported by the european community through theprojectsrobust(h2020- 690416),euroc(fp7-608849), dexrov (h2020-635491) and aeroarms (h2020-644271).”IFAC-PapersOnLine, vol. 50, pp. 6869–6874, 07 2017
work page 2017
-
[24]
Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn, “Learning fine-grained bimanual manipulation with low-cost hard- ware,”arXiv preprint arXiv:2304.13705, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[25]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
K. Black, N. Brown, D. Driess, A. Esmail, M. Equi, C. Finn, N. Fusai, L. Groom, K. Hausman, B. Ichter, et al., “π 0: A vision-language-action flow model for general robot control,”arXiv preprint arXiv:2410.24164, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[26]
OpenVLA: An Open-Source Vision-Language-Action Model
M. J. Kim, K. Pertsch, S. Karamcheti, T. Xiao, A. Balakr- ishna, S. Nair, R. Rafailov, E. Foster, G. Lam, P. Sanketi, et al., “Openvla: An open-source vision-language-action model,”arXiv preprint arXiv:2406.09246, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[27]
Diffusion pol- icy: Visuomotor policy learning via action diffusion,
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song, “Diffusion pol- icy: Visuomotor policy learning via action diffusion,” The International Journal of Robotics Research, p. 02783649241273668, 2023
work page 2023
-
[28]
What Matters in Learning from Offline Human Demonstrations for Robot Manipulation
A. Mandlekar, D. Xu, J. Wong, S. Nasiriany, C. Wang, R. Kulkarni, L. Fei-Fei, S. Savarese, Y . Zhu, and R. Mart´ın-Mart´ın, “What matters in learning from offline human demonstrations for robot manipulation,”arXiv preprint arXiv:2108.03298, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[29]
Keypoint action tokens enable in-context imitation learning in robotics,
N. Di Palo and E. Johns, “Keypoint action tokens enable in-context imitation learning in robotics,”arXiv preprint arXiv:2403.19578, 2024
-
[30]
Open x-embodiment: Robotic learning datasets and rt-x models: Open x-embodiment collaboration 0,
A. O’Neill, A. Rehman, A. Maddukuri, A. Gupta, A. Padalkar, A. Lee, A. Pooley, A. Gupta, A. Man- dlekar, A. Jain,et al., “Open x-embodiment: Robotic learning datasets and rt-x models: Open x-embodiment collaboration 0,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 6892–6903
work page 2024
-
[31]
M. Bhardwaj, B. Sundaralingam, A. Mousavian, N. D. Ratliff, D. Fox, F. Ramos, and B. Boots, “Storm: An in- tegrated framework for fast joint-space model-predictive control for reactive manipulation,” inConference on Robot Learning. PMLR, 2022, pp. 750–759
work page 2022
-
[32]
Learning singularity avoidance,
J. Manavalan and M. Howard, “Learning singularity avoidance,” in2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019, pp. 6849–6854
work page 2019
-
[33]
Bunny-visionpro: Real-time bimanual dexterous teleoperation for imitation learning,
R. Ding, Y . Qin, J. Zhu, C. Jia, S. Yang, R. Yang, X. Qi, and X. Wang, “Bunny-visionpro: Real-time bimanual dexterous teleoperation for imitation learning,”arXiv preprint arXiv:2407.03162, 2024
-
[34]
Kinova Robotics,Kinova® Gen3 Ultra Lightweight Robot User Guide, 2022, Accessed: 2025-03-22, p. 95. [Online]. Available: https://www.kinovarobotics. com/uploads/User-Guide-Gen3-R07.pdf
work page 2022
-
[35]
A review of cuspidal serial and parallel manipulators,
P. Wenger and D. Chablat, “A review of cuspidal serial and parallel manipulators,”Journal of Mechanisms and Robotics, vol. 15, pp. 1–37, 09 2022
work page 2022
-
[36]
Liberzon,Switching in systems and control
D. Liberzon,Switching in systems and control. Springer, 2003, vol. 190
work page 2003
-
[37]
Estimating the Jacobian of the Singular Value Decomposition : Theory and Applications,
T. Papadopoulo and M. L. Lourakis, “Estimating the Jacobian of the Singular Value Decomposition : Theory and Applications,” INRIA, Tech. Rep. R-3961, inria- 00072686, 2000
work page 2000
-
[38]
Notes on partial differential equations, Department of Mathematics, UC Davis,
J. K. Hunter, “Notes on partial differential equations, Department of Mathematics, UC Davis,” 2014. [Online]. Available: https://www.math.ucdavis.edu/ ∼hunter/pdes/ pde notes.pdf
work page 2014
-
[39]
Inverse kinematic algorithms for redundant systems,
H. Das, J.-E. Slotine, and T. Sheridan, “Inverse kinematic algorithms for redundant systems,” inProceedings. 1988 IEEE International Conference on Robotics and Automa- tion, 1988, pp. 43–48 vol.1
work page 1988
-
[40]
Design and use paradigms for gazebo, an open-source multi-robot simulator,
N. Koenig and A. Howard, “Design and use paradigms for gazebo, an open-source multi-robot simulator,” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, September 2004, pp. 2149–2154
work page 2004
-
[41]
The Mathematics of Coordinated Con- trol of Prosthetic Arms and Manipulators,
D. E. Whitney, “The Mathematics of Coordinated Con- trol of Prosthetic Arms and Manipulators,”Journal of Dynamic Systems, Measurement, and Control, vol. 94, no. 4, pp. 303–309, Dec. 1972
work page 1972
-
[42]
Kinemat- ically Redundant Manipulators,
S. Chiaverini, G. Oriolo, and I. D. Walker, “Kinemat- ically Redundant Manipulators,” inSpringer Handbook of Robotics, B. Siciliano and O. Khatib, Eds. Berlin, Heidelberg: Springer, 2008, pp. 245–268
work page 2008
-
[43]
Apriltag: A robust and flexible visual fiducial system,
E. Olson, “Apriltag: A robust and flexible visual fiducial system,” in2011 IEEE International Conference on Robotics and Automation, 2011, pp. 3400–3407
work page 2011
-
[44]
Denoising Diffusion Probabilistic Models,
J. Ho, A. Jain, and P. Abbeel, “Denoising Diffusion Probabilistic Models,” inAdvances in Neural Information 21 Processing Systems, vol. 33. Curran Associates, Inc., 2020, pp. 6840–6851
work page 2020
-
[45]
Diffusion pol- icy: Visuomotor policy learning via action diffusion,
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song, “Diffusion pol- icy: Visuomotor policy learning via action diffusion,” The International Journal of Robotics Research, p. 02783649241273668, Oct. 2024
work page 2024
-
[46]
FiLM: Visual Reasoning with a General Conditioning Layer,
E. Perez, F. Strub, H. de Vries, V . Dumoulin, and A. Courville, “FiLM: Visual Reasoning with a General Conditioning Layer,”Proceedings of the AAAI Confer- ence on Artificial Intelligence, vol. 32, no. 1, Apr. 2018
work page 2018
-
[47]
Johnston,Advanced Linear and Matrix Algebra
N. Johnston,Advanced Linear and Matrix Algebra. Springer International Publishing, 2021, pp. 200–201. [Online]. Available: https://www.springer.com/us/book/ 9783030528140
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.