Behavior Synthesis via Contact-Aware Fisher Information Maximization
Pith reviewed 2026-05-22 15:16 UTC · model grok-4.3
The pith
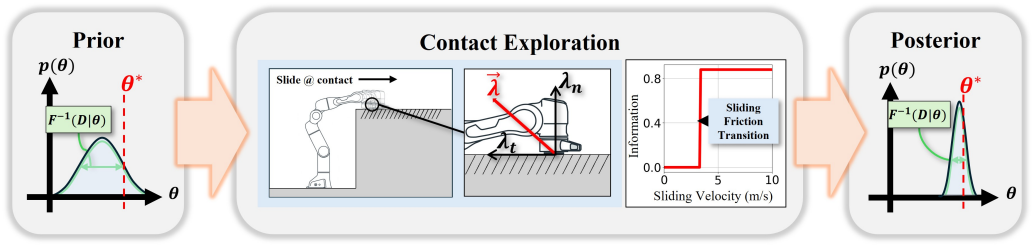
Maximizing a contact-aware Fisher information measure synthesizes robot behaviors that generate data for efficient object parameter learning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
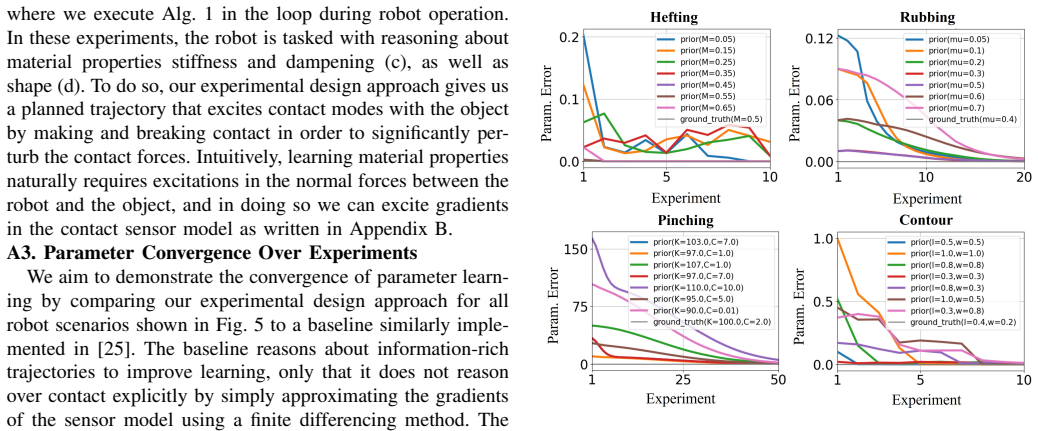
The central claim is that a contact-aware Fisher information measure characterizes information-rich contact behaviors, enabling the synthesis of emergent robot actions that excite contacts and thereby improve parameter learning efficiency across a range of examples, as shown in robotic experiments.
What carries the argument
The contact-aware Fisher information measure, which quantifies information gain about object parameters specifically from contact dynamics and is maximized to guide behavior synthesis in an optimal experimental design setting.
Load-bearing premise
The contact dynamics model is accurate enough that the computed Fisher information matrix remains reliable and that gains observed in simulation transfer to real-world parameter learning without large model mismatch.
What would settle it
If real-robot trials using the synthesized behaviors show no improvement or increased error in estimated object parameters relative to baseline behaviors that ignore contact awareness, the central claim would be falsified.
Figures






read the original abstract
Contact dynamics hold immense amounts of information that can improve a robot's ability to characterize and learn about objects in their environment through interactions. However, collecting information-rich contact data is challenging due to its inherent sparsity and non-smooth nature, requiring an active approach to maximize the utility of contacts for learning. In this work, we investigate an optimal experimental design approach to synthesize robot behaviors that produce contact-rich data for learning. Our approach derives a contact-aware Fisher information measure that characterizes information-rich contact behaviors that improve parameter learning. We observe emergent robot behaviors that are able to excite contact interactions that efficiently learns object parameters across a range of parameter learning examples. Last, we demonstrate the utility of contact-awareness for learning parameters through contact-seeking behaviors on several robotic experiments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an optimal experimental design method to synthesize robot behaviors that maximize a contact-aware Fisher information measure, thereby generating information-rich contact data for improved object parameter learning. It derives this specialized Fisher information to characterize useful contact behaviors, reports emergent contact-seeking robot motions across parameter learning examples, and validates the approach via several robotic experiments.
Significance. If the central claims hold, the work could advance active learning and perception in contact-rich robotics by supplying a principled information-theoretic objective for behavior synthesis. Credit is due for the derivation of the contact-aware Fisher measure and for the observation of emergent behaviors that improve parameter estimation without hand-engineered rewards. This has clear relevance to manipulation tasks where contacts are the primary source of information.
major comments (2)
- [Method] Method section (contact-aware Fisher derivation): the approach relies on the underlying rigid-body contact model being sufficiently accurate for the computed Fisher information matrix to rank trajectories meaningfully. No sensitivity analysis to contact parameters, complementarity approximations, or smoothing schemes is provided, which is load-bearing because model mismatch can bias the information measure and produce behaviors that are informative only in simulation.
- [Experiments] Experiments section: the robotic demonstrations show utility of contact-seeking behaviors, yet no sim-to-real transfer results or quantitative assessment of how contact-model error propagates into the learned parameters are reported. This weakens the claim that maximization in simulation yields improved real-world parameter learning.
minor comments (1)
- [Abstract] Abstract: the clause 'that efficiently learns object parameters' contains a subject-verb agreement error ('learns' should be 'learn' to match the plural 'behaviors').
Simulated Author's Rebuttal
We thank the referee for the positive summary and for highlighting the potential impact of the contact-aware Fisher information approach. We address each major comment below in detail and commit to revisions that strengthen the manuscript's claims regarding model robustness and real-world applicability.
read point-by-point responses
-
Referee: [Method] Method section (contact-aware Fisher derivation): the approach relies on the underlying rigid-body contact model being sufficiently accurate for the computed Fisher information matrix to rank trajectories meaningfully. No sensitivity analysis to contact parameters, complementarity approximations, or smoothing schemes is provided, which is load-bearing because model mismatch can bias the information measure and produce behaviors that are informative only in simulation.
Authors: We agree that the accuracy of the rigid-body contact model is critical for the Fisher information matrix to produce meaningful trajectory rankings. The derivation employs standard complementarity-based contact models with common smoothing approximations drawn from the contact-rich robotics literature. To address the concern directly, we will add a sensitivity analysis to the revised manuscript. This will include systematic variation of key parameters (friction coefficients, contact stiffness, and smoothing factors) over realistic ranges, with results showing that the emergent contact-seeking behaviors and relative information gains remain consistent. We believe this addition will demonstrate that the measure is not overly sensitive to moderate model variations. revision: yes
-
Referee: [Experiments] Experiments section: the robotic demonstrations show utility of contact-seeking behaviors, yet no sim-to-real transfer results or quantitative assessment of how contact-model error propagates into the learned parameters are reported. This weakens the claim that maximization in simulation yields improved real-world parameter learning.
Authors: The referee is correct that the current experiments do not include an explicit quantitative study of contact-model error propagation or dedicated sim-to-real transfer metrics. Our robotic results execute the simulation-optimized behaviors on hardware and demonstrate improved parameter estimation using real contact data. In the revision we will expand the experiments section with a new analysis that perturbs contact parameters in simulation, quantifies the resulting change in learned object parameters, and discusses observed differences between simulation predictions and physical trials. This will provide a clearer assessment of how model mismatch affects real-world learning performance. revision: yes
Circularity Check
Derivation of contact-aware Fisher information remains self-contained with no reduction to fitted inputs or self-citations
full rationale
The paper presents a derivation of a contact-aware Fisher information measure grounded in standard optimal experimental design principles applied to hybrid contact dynamics. This measure is then maximized to synthesize behaviors, with validation through robotic experiments demonstrating improved parameter learning. No equations or steps in the abstract or described method reduce the central result to a self-definition, a fitted parameter renamed as prediction, or a load-bearing self-citation chain. The approach relies on the mathematical construction of the information matrix from the underlying dynamics model and empirical testing, making the derivation independent rather than circular by construction.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Our approach derives a contact-aware Fisher information measure that characterizes information-rich contact behaviors... maximizing this quantity in simulation translates to improved real-world parameter learning
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
contact-implicit trajectory optimization... linear complementarity constraints
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 2 Pith papers
-
Stein Variational Uncertainty-Adaptive Model Predictive Control
A new Stein variational controller for nonlinear systems with parametric uncertainty achieves better performance-robustness tradeoffs than worst-case or ensemble baselines by shaping control around task-dependent unce...
-
Distributionally Robust Control via Stein Variational Inference for Contact-Rich Manipulation
Introduces a Stein variational inference-based deterministic formulation for distributionally robust control in contact-rich robotic manipulation, reporting up to 3x improved robustness under parametric uncertainty.
Reference graph
Works this paper leans on
-
[1]
Mihai Anitescu and Florian Potra. Formulating dy- namic multi-rigid-body contact problems with friction as solvable linear complementarity problems.Nonlinear Dynamics, 14, 03 1997. doi: 10.1023/A:1008292328909
-
[2]
Nikolay Atanasov, Jerome Le Ny, Kostas Daniilidis, and George J. Pappas. Information acquisition with sensing robots: Algorithms and error bounds, 2013
work page 2013
-
[3]
Alp Aydinoglu and Michael Posa. Real-time multi- contact model predictive control via admm. In2022 International Conference on Robotics and Automation (ICRA), page 3414–3421. IEEE Press, 2022. doi: 10. 1109/ICRA46639.2022.9811957. URL https://doi.org/ 10.1109/ICRA46639.2022.9811957
-
[4]
R. Bellman and K.J. ˚Astr¨om. On structural identifiability. Mathematical Biosciences, 7(3):329–339, 1970. ISSN 0025-5564. doi: https://doi.org/10.1016/0025-5564(70) 90132-X. URL https://www.sciencedirect.com/science/ article/pii/002555647090132X
-
[5]
Applied and Numerical Harmonic Analysis
Gregory S Chirikjian.Stochastic Models, Information Theory, and Lie Groups, Volume 1: Classical Results and Geometric Methods. Applied and Numerical Harmonic Analysis. Birkh ¨auser Boston, Boston, 1 edition, 2009. ISBN 081764802X
work page 2009
- [6]
-
[7]
Optimal exper- iment design.Measurement Science and Technology, 9 (6):864, jun 1998
A F Emery and Aleksey V Nenarokomov. Optimal exper- iment design.Measurement Science and Technology, 9 (6):864, jun 1998. doi: 10.1088/0957-0233/9/6/003. URL https://dx.doi.org/10.1088/0957-0233/9/6/003
-
[8]
Nima Fazeli, Roman Kolbert, Russ Tedrake, and Alberto Rodriguez. Parameter and contact force estimation of planar rigid-bodies undergoing frictional contact.The International Journal of Robotics Research, 36(13-14): 1437–1454, 2017. doi: 10.1177/0278364917698749. URL https://doi.org/10.1177/0278364917698749
-
[9]
Valerii Fedorov. Optimal experimental design.Wiley Interdisciplinary Reviews: Computational Statistics, 2(5): 581–589, 2010
work page 2010
-
[10]
T.I. Fenner and G. Loizou. Matrix bounds on the spectral condition number.Linear Algebra and its Applications, 8(2):157–178, 1974. ISSN 0024-3795. doi: https://doi.org/10.1016/0024-3795(74) 90053-6. URL https://www.sciencedirect.com/science/ article/pii/0024379574900536
-
[11]
M. Gautier and W. Khalil. On the identification of the inertial parameters of robots. InProceedings of the 27th IEEE Conference on Decision and Control, pages 2264– 2269 vol.3, 1988. doi: 10.1109/CDC.1988.194738
-
[12]
Maximum likelihood estimation is all you need for well-specified covariate shift, 2023
Jiawei Ge, Shange Tang, Jianqing Fan, Cong Ma, and Chi Jin. Maximum likelihood estimation is all you need for well-specified covariate shift, 2023. URL https://arxiv. org/abs/2311.15961
-
[13]
Predictive sampling: Real-time behaviour synthesis with mujoco,
Taylor Howell, Nimrod Gileadi, Saran Tunyasuvunakool, Kevin Zakka, Tom Erez, and Yuval Tassa. Predictive sampling: Real-time behaviour synthesis with mujoco,
- [14]
-
[15]
Learning linear complementarity systems
Wanxin Jin, Alp Aydinoglu, Mathew Halm, and Michael Posa. Learning linear complementarity systems. In Roya Firoozi, Negar Mehr, Esen Yel, Rika Antonova, Jeannette Bohg, Mac Schwager, and Mykel Kochenderfer, editors, Proceedings of The 4th Annual Learning for Dynamics and Control Conference, volume 168 ofProceedings of Machine Learning Research, pages 1137...
work page 2022
-
[16]
Leslie Pack Kaelbling, Michael L. Littman, and Anthony R. Cassandra. Planning and acting in partially observable stochastic domains.Artificial Intelligence, 101(1):99–134, 1998. ISSN 0004-
work page 1998
-
[17]
URL https://www.sciencedirect.com/science/ article/pii/S000437029800023X
doi: https://doi.org/10.1016/S0004-3702(98) 00023-X. URL https://www.sciencedirect.com/science/ article/pii/S000437029800023X
-
[18]
Pradeep K. Khosla and Takeo Kanade. Parameter identification of robot dynamics. In1985 24th IEEE Conference on Decision and Control, pages 1754–1760,
-
[19]
doi: 10.1109/CDC.1985.268838
-
[20]
J. Kiefer. Optimum experimental designs. Journal of the Royal Statistical Society: Series B (Methodological), 21(2):272–304, 1959. doi: https://doi.org/10.1111/j.2517-6161.1959.tb00338.x. URL https://rss.onlinelibrary.wiley.com/doi/abs/10.1111/ j.2517-6161.1959.tb00338.x
-
[21]
Nathan J. Kong, J. Joe Payne, James Zhu, and Aaron M. Johnson. Saltation matrices: The essential tool for linearizing hybrid dynamical systems.Proceedings of the IEEE, 112(6):585–608, June 2024. ISSN 1558-
work page 2024
-
[22]
URL http: //dx.doi.org/10.1109/JPROC.2024.3440211
doi: 10.1109/jproc.2024.3440211. URL http: //dx.doi.org/10.1109/JPROC.2024.3440211
-
[23]
Mikko Lauri and Risto Ritala. Planning for robotic exploration based on forward simulation.Robotics and Autonomous Systems, 83:15–31, September 2016. ISSN 0921-8890. doi: 10.1016/j.robot.2016.06.008. URL http://dx.doi.org/10.1016/j.robot.2016.06.008
-
[24]
Susan J. Lederman and Roberta L. Klatzky. Extracting object properties through haptic exploration.Acta Psychologica, 84(1):29–40, 1993. ISSN 0001-6918. doi: https://doi.org/10.1016/0001-6918(93)90070-8. URL https://www.sciencedirect.com/science/article/pii/ 0001691893900708. Tactile Pattern Recognition
-
[25]
Taeyoon Lee, Jaewoon Kwon, Patrick M. Wensing, and Frank C. Park. Robot model identification and learning: A modern perspective.Annual Review of Control, Robotics, and Autonomous Systems, 2023. doi: https://doi.org/10.1146/annurev-control-061523-102310. URL https://www.annualreviews.org/content/journals/10. 1146/annurev-control-061523-102310
-
[26]
Jonas Linder, Martin Enqvist, Fredrik Gustafsson, and Johan Sj ¨oberg. Identifiability of physical parame- ters in systems with limited sensors.IFAC Proceed- ings Volumes, 47(3):6454–6459, 2014. ISSN 1474-
work page 2014
-
[27]
doi: https://doi.org/10.3182/20140824-6-ZA-1003. 02272. URL https://www.sciencedirect.com/science/ article/pii/S147466701642625X. 19th IFAC World Congress
-
[28]
Lennart Ljung.System identification (2nd ed.): theory for the user. Prentice Hall PTR, USA, 1999. ISBN 0136566952
work page 1999
-
[29]
Variational contact-implicit trajectory optimization
Zac Manchester and Scott Kuindersma. Variational contact-implicit trajectory optimization. InProceedings of International Symposium on Robotics Research (ISRR ’17), pages 985 – 1000, December 2017
work page 2017
-
[30]
Asid: Active exploration for system identification in robotic manipulation,
Marius Memmel, Andrew Wagenmaker, Chuning Zhu, Patrick Yin, Dieter Fox, and Abhishek Gupta. Asid: Ac- tive exploration for system identification in robotic ma- nipulation, 2024. URL https://arxiv.org/abs/2404.12308
-
[31]
Discovery of complex behaviors through contact- invariant optimization.ACM Trans
Igor Mordatch, Emanuel Todorov, and Zoran Popovi ´c. Discovery of complex behaviors through contact- invariant optimization.ACM Trans. Graph., 31(4), July
-
[32]
ISSN 0730-0301. doi: 10.1145/2185520.2185539. URL https://doi.org/10.1145/2185520.2185539
-
[33]
Yusuke Ogawa, Gentiane Venture, and Christian Ott. Dynamic parameters identification of a humanoid robot using joint torque sensors and/or contact forces. 2015: 457–462, 02 2015. doi: 10.1109/HUMANOIDS.2014. 7041401
-
[34]
Fun- damental challenges in deep learning for stiff contact dynamics, 2021
Mihir Parmar, Mathew Halm, and Michael Posa. Fun- damental challenges in deep learning for stiff contact dynamics, 2021
work page 2021
-
[35]
Chiara Pepi, Massimiliano Gioffr `e, and Mircea Grig- oriu. Bayesian inference for parameters estima- tion using experimental data.Probabilistic Engi- neering Mechanics, 60:103025, 2020. ISSN 0266-
work page 2020
-
[36]
doi: https://doi.org/10.1016/j.probengmech.2020. 103025. URL https://www.sciencedirect.com/science/ article/pii/S0266892020300102
-
[37]
Contactnets: Learning of discontinuous contact dynamics with smooth, implicit representations
Samuel Pfrommer, Mathew Halm, and Michael Posa. Contactnets: Learning of discontinuous contact dynamics with smooth, implicit representations. InConference on Robot Learning, 2020. URL https://api.semanticscholar. org/CorpusID:221857185
work page 2020
-
[38]
Belief space planning assuming maximum likelihood observations
Robert Platt, Russ Tedrake, Leslie Pack Kaelbling, and Tomas Lozano-Perez. Belief space planning assuming maximum likelihood observations. InRobotics: Science and Systems, 2010. URL https://api.semanticscholar.org/ CorpusID:2693863
work page 2010
-
[39]
Michael Posa, Cecilia Cantu, and Russ Tedrake. A direct method for trajectory optimization of rigid bodies through contact.The International Journal of Robotics Research, 33(1):69–81, 2014. doi: 10. 1177/0278364913506757. URL https://doi.org/10.1177/ 0278364913506757
work page 2014
-
[40]
C. Radhakrishna Rao. Minimum variance and the esti- mation of several parameters.Mathematical Proceedings of the Cambridge Philosophical Society, 43(2):280–283,
-
[41]
doi: 10.1017/S0305004100023471
-
[42]
Bridging the sim-to-real gap with bayesian inference, 2024
Jonas Rothfuss, Bhavya Sukhija, Lenart Treven, Florian D¨orfler, Stelian Coros, and Andreas Krause. Bridging the sim-to-real gap with bayesian inference, 2024. URL https://arxiv.org/abs/2403.16644
-
[43]
Dart: Dense articulated real-time tracking
Tanner Schmidt and Dieter Fox. Dart: Dense articulated real-time tracking
-
[44]
On the variance of the fisher information for deep learning, 2021
Alexander Soen and Ke Sun. On the variance of the fisher information for deep learning, 2021. URL https: //arxiv.org/abs/2107.04205
-
[45]
David E. Stewart and Jeffrey C. Trinkle. An im- plicit time-stepping scheme for rigid body dynamics with coulomb friction.Proceedings 2000 ICRA. Mil- lennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), 1:162–169 vol.1, 2000. URL https: //api.semanticscholar.org/CorpusID:10920958
work page 2000
-
[46]
Relative Fisher information and natural gradient for learning large modular models
Ke Sun and Frank Nielsen. Relative Fisher information and natural gradient for learning large modular models. In Doina Precup and Yee Whye Teh, editors,Proceedings of the 34th International Conference on Machine Learn- ing, volume 70 ofProceedings of Machine Learning Research, pages 3289–3298. PMLR, 06–11 Aug 2017. URL https://proceedings.mlr.press/v70/su...
work page 2017
-
[47]
In-hand object-dynamics inference using tactile fingertips, 2021
Balakumar Sundaralingam and Tucker Hermans. In-hand object-dynamics inference using tactile fingertips, 2021. URL https://arxiv.org/abs/2003.13165
-
[48]
J. Swevers, C. Ganseman, D.B. Tukel, J. de Schutter, and H. Van Brussel. Optimal robot excitation and identifica- tion.IEEE Transactions on Robotics and Automation, 13 (5):730–740, 1997. doi: 10.1109/70.631234
-
[49]
Yuval Tassa, Tom Erez, and Emanuel Todorov. Synthesis and stabilization of complex behaviors through online trajectory optimization. In2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 4906–4913, 2012. doi: 10.1109/IROS.2012.6386025
-
[50]
Emanuel Todorov, Tom Erez, and Yuval Tassa. Mu- joco: A physics engine for model-based control. In 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 5026–5033. IEEE, 2012. doi: 10.1109/IROS.2012.6386109
-
[51]
Learning active tactile perception through belief-space control, 2023
Jean-Franc ¸ois Tremblay, David Meger, Francois Hogan, and Gregory Dudek. Learning active tactile perception through belief-space control, 2023. URL https://arxiv. org/abs/2312.00215
-
[52]
Andrew D. Wilson, Jarvis A. Schultz, and Todd D. Murphey. Trajectory synthesis for fisher information maximization.IEEE Transactions on Robotics, 30(6): 1358–1370, December 2014. ISSN 1941-0468. doi: 10.1109/tro.2014.2345918. URL http://dx.doi.org/10. 1109/TRO.2014.2345918
-
[53]
Andrew D. Wilson, Jarvis A. Schultz, Alex R. Ansari, and Todd D. Murphey. Real-time trajectory synthesis for information maximization using sequential action control and least-squares estimation. In2015 IEEE/RSJ Inter- national Conference on Intelligent Robots and Systems (IROS), pages 4935–4940, 2015. doi: 10.1109/IROS. 2015.7354071
-
[54]
Impact-invariant con- trol: Maximizing control authority during impacts, 2023
William Yang and Michael Posa. Impact-invariant con- trol: Maximizing control authority during impacts, 2023
work page 2023
-
[55]
Belief space planning: A covariance steering approach, 2021
Dongliang Zheng, Jack Ridderhof, Panagiotis Tsiotras, and Ali akbar Agha-mohammadi. Belief space planning: A covariance steering approach, 2021. URL https://arxiv. org/abs/2105.11092. APPENDIXA PROOFS Fisher Information Steepest Ascent Proof Proof.We first approximateL(D|τ, θ+δθ)in Eq.11 by a second order Taylor expansion, L(D|τ, θ+δθ)≈ L(D|τ, θ) +∇ θL(D|...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.