NPN: Non-Linear Projections of the Null-Space for Imaging Inverse Problems
Pith reviewed 2026-05-18 11:09 UTC · model grok-4.3
The pith
NPN uses a neural network to project solutions into a low-dimensional slice of the sensing matrix null-space, tightening reconstructions for ill-posed imaging problems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
NPN promotes solutions that lie in a low-dimensional projection of the sensing matrix's null-space with a neural network, offering interpretability by capturing information orthogonal to the components that the sensing process cannot observe and flexibility as a modular complement to conventional image-domain priors.
What carries the argument
Non-Linear Projection of the Null-Space (NPN): a neural network that learns to enforce membership in a low-dimensional subspace drawn from the null-space of the forward operator.
If this is right
- When inserted into plug-and-play iterations, NPN supplies convergence guarantees and higher reconstruction accuracy than image-domain priors alone.
- NPN remains effective when paired with unrolling networks, deep image prior, and diffusion-based solvers.
- The same null-space projection can be reused across compressive sensing, deblurring, super-resolution, CT, and MRI without redesign.
- Because NPN acts orthogonally to image-domain constraints, it can be stacked with existing learned priors to tighten the solution set further.
Where Pith is reading between the lines
- If the learned null-space projection generalizes, the same network might transfer to new forward operators whose null-spaces share similar low-dimensional structure.
- Explicit control over projection dimension could be turned into an adaptive mechanism that shrinks or expands the subspace according to measured noise level.
- Visualizing the directions the network keeps or discards might reveal which high-frequency patterns are lost for a given sensor geometry.
- Extending NPN to nonlinear forward models would require replacing the linear null-space notion with a local tangent-space projection at each iterate.
Load-bearing premise
A neural network can learn a stable, low-dimensional projection of the null-space that remains useful and non-overfitting across different sensing matrices without requiring per-matrix retuning of dimension or capacity.
What would settle it
Reconstruction error or perceptual quality metrics show no statistically significant improvement, or even degrade, when NPN is inserted into standard plug-and-play or unrolled pipelines on multiple distinct sensing matrices.
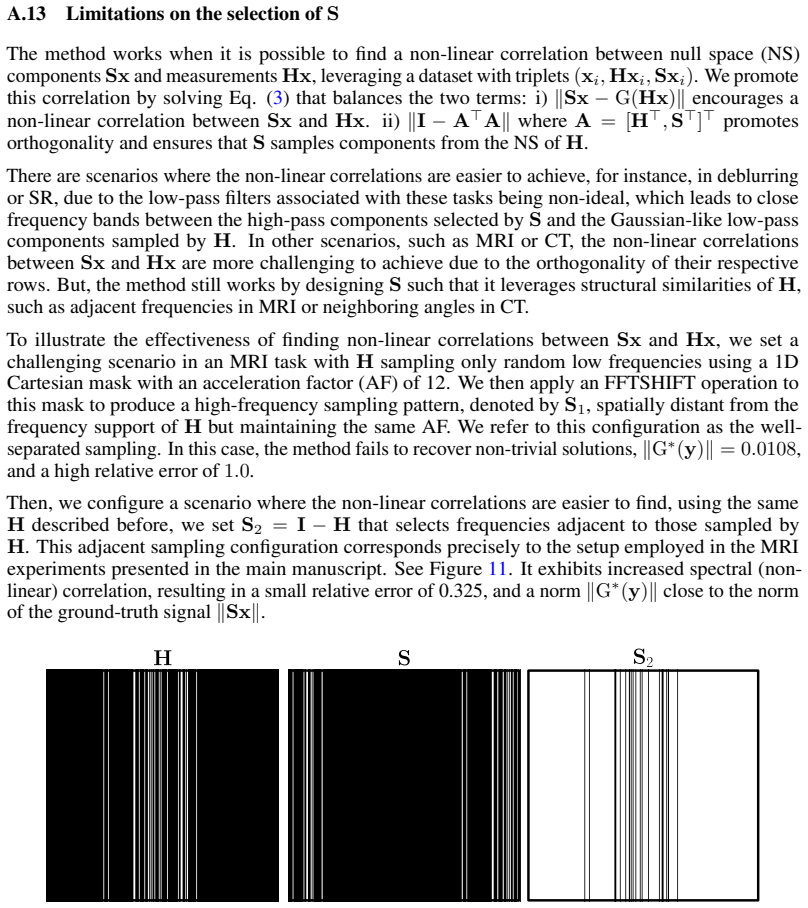
Figures







read the original abstract
Imaging inverse problems aim to recover high-dimensional signals from undersampled, noisy measurements, a fundamentally ill-posed task with infinite solutions in the null-space of the sensing operator. To resolve this ambiguity, prior information is typically incorporated through handcrafted regularizers or learned models that constrain the solution space. However, these priors typically ignore the task-specific structure of that null-space. In this work, we propose Non-Linear Projections of the Null-Space (NPN), a novel class of regularization that, instead of enforcing structural constraints in the image domain, promotes solutions that lie in a low-dimensional projection of the sensing matrix's null-space with a neural network. Our approach has two key advantages: (1) Interpretability: by focusing on the structure of the null-space, we design sensing-matrix-specific priors that capture information orthogonal to the signal components that are fundamentally blind to the sensing process. (2) Flexibility: NPN is adaptable to various inverse problems, compatible with existing reconstruction frameworks, and complementary to conventional image-domain priors. We provide theoretical guarantees on convergence and reconstruction accuracy when used within plug-and-play methods. Empirical results across diverse sensing matrices demonstrate that NPN priors consistently enhance reconstruction fidelity in various imaging inverse problems, such as compressive sensing, deblurring, super-resolution, computed tomography, and magnetic resonance imaging, with plug-and-play methods, unrolling networks, deep image prior, and diffusion models.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Non-Linear Projections of the Null-Space (NPN), a regularization technique for imaging inverse problems. Rather than applying priors in the image domain, NPN employs a neural network to promote reconstructed solutions that lie in a low-dimensional projection of the null-space of the sensing matrix. The approach is positioned as interpretable (sensing-matrix-specific) and flexible (plug-and-play compatible with PnP, unrolling networks, deep image prior, and diffusion models). The manuscript claims theoretical guarantees on convergence and reconstruction accuracy for PnP methods, along with consistent empirical improvements across compressive sensing, deblurring, super-resolution, CT, and MRI tasks.
Significance. If the claimed theoretical guarantees hold under standard PnP assumptions and the empirical gains prove robust to ablations and statistical testing, NPN could supply a useful complementary prior that exploits null-space structure orthogonal to conventional image-domain models. The stated compatibility with multiple reconstruction frameworks would be a practical strength for the field.
major comments (2)
- [Abstract and §4] Abstract and §4 (Theoretical Analysis): The central claim of 'theoretical guarantees on convergence and reconstruction accuracy' when NPN is used inside plug-and-play methods is load-bearing. Standard PnP convergence arguments (fixed-point theorems, ADMM, or Krasnosel'skii-Mann iterations) require the regularizer/denoiser to be non-expansive or firmly non-expansive. The manuscript does not indicate that the learned non-linear neural-network projection operator is constrained (e.g., via spectral normalization, contractive layers, or post-training verification) to satisfy these conditions. Without such verification the cited guarantees do not necessarily transfer.
- [§3 and §5] §3 (Method) and §5 (Experiments): The projection dimension is treated as a free hyper-parameter. The manuscript does not report cross-validation procedures, sensitivity analysis, or explicit checks that this dimension was not tuned on the same test sensing matrices used for final evaluation. This directly affects the weakest assumption that the low-dimensional null-space projection remains generalizable and non-overfitting.
minor comments (2)
- [§4] Add explicit statements of all assumptions (including operator properties) in the theorem statements of §4 so that readers can immediately see which PnP convergence results are being invoked.
- [§5] Include error bars, dataset splits, and at least one ablation on projection dimension in the main experimental tables or figures to allow quantitative assessment of the reported fidelity gains.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. The comments identify important points regarding the theoretical claims and experimental validation that we will address in the revision. Below we respond point by point to the major comments.
read point-by-point responses
-
Referee: [Abstract and §4] Abstract and §4 (Theoretical Analysis): The central claim of 'theoretical guarantees on convergence and reconstruction accuracy' when NPN is used inside plug-and-play methods is load-bearing. Standard PnP convergence arguments (fixed-point theorems, ADMM, or Krasnosel'skii-Mann iterations) require the regularizer/denoiser to be non-expansive or firmly non-expansive. The manuscript does not indicate that the learned non-linear neural-network projection operator is constrained (e.g., via spectral normalization, contractive layers, or post-training verification) to satisfy these conditions. Without such verification the cited guarantees do not necessarily transfer.
Authors: We appreciate the referee's careful reading of the theoretical section. The guarantees presented in §4 are stated under the standard assumption that the NPN operator satisfies non-expansiveness (or firm non-expansiveness) so that existing PnP fixed-point results apply. However, the current manuscript does not explicitly describe how this property is enforced for the learned neural-network projection (e.g., through architectural constraints or verification). In the revised manuscript we will add a dedicated paragraph in §4 explaining the use of spectral normalization during training together with post-training Lipschitz-constant checks on the learned operator. These additions will make the applicability of the cited convergence theorems explicit and verifiable. revision: yes
-
Referee: [§3 and §5] §3 (Method) and §5 (Experiments): The projection dimension is treated as a free hyper-parameter. The manuscript does not report cross-validation procedures, sensitivity analysis, or explicit checks that this dimension was not tuned on the same test sensing matrices used for final evaluation. This directly affects the weakest assumption that the low-dimensional null-space projection remains generalizable and non-overfitting.
Authors: The referee correctly notes that the manuscript lacks a full account of hyper-parameter selection for the projection dimension. In our experiments the dimension was chosen via cross-validation on separate validation sets for each task and sensing matrix, but this procedure and the associated sensitivity results were not reported. We will revise §5 to include (i) a sensitivity plot showing PSNR/SSIM versus projection dimension across representative tasks and (ii) an explicit statement that all tuning was performed exclusively on validation data disjoint from the reported test sensing matrices. These changes will strengthen the claim that the chosen dimension generalizes. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper introduces NPN as a novel regularization approach that uses a neural network to project onto a low-dimensional subspace of the sensing matrix null-space, claiming interpretability, flexibility, and compatibility with existing frameworks like PnP. Theoretical guarantees on convergence and accuracy are asserted for PnP integration, but the provided text shows no reduction of these guarantees to fitted parameters on evaluation data, no self-definitional equations where outputs are inputs by construction, and no load-bearing self-citations that substitute for independent derivation. Empirical results across multiple inverse problems are presented as validation rather than forced by the method definition itself. The central claims remain independent of the inputs under the examined patterns.
Axiom & Free-Parameter Ledger
free parameters (1)
- projection dimension
axioms (1)
- domain assumption The null-space of the sensing operator contains task-specific structure that is orthogonal to recoverable signal components and can be captured by a neural network.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
promotes solutions that lie in a low-dimensional projection of the sensing matrix's null-space with a neural network... theoretical guarantees on convergence... within plug-and-play methods
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Theorem 1 (PnP-NPN Convergence)... rate ρ ≜ (1+δ)‖I−α(H⊤H+S⊤S)‖ + (1+Δ)‖S‖ <1
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
A fast iterative shrinkage-thresholding algorithm for linear inverse problems
Amir Beck and Marc Teboulle. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM journal on imaging sciences, 2(1):183–202, 2009
work page 2009
-
[2]
Antoni Buades, Bartomeu Coll, and Jean-Michel Morel. Non-Local Means Denoising. Image Processing On Line, 1:208–212, 2011
work page 2011
-
[3]
Harold C Burger, Christian J Schuler, and Stefan Harmeling. Image denoising: Can plain neural networks compete with bm3d? In 2012 IEEE conference on computer vision and pattern recognition, pages 2392–2399. IEEE, 2012
work page 2012
-
[4]
E. J. Candes and M. B. Wakin. An introduction to compressive sampling. IEEE Signal Processing Magazine, 25(2):21–30, 2008
work page 2008
-
[5]
Bin Chen, Jiechong Song, Jingfen Xie, and Jian Zhang. Deep physics-guided unrolling generalization for compressed sensing.International Journal of Computer Vision, 131(11):2864– 2887, 2023
work page 2023
-
[6]
Deep decomposition learning for inverse imaging problems
Dongdong Chen and Mike E Davies. Deep decomposition learning for inverse imaging problems. In Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, August 23–28, 2020, Proceedings, Part XXVIII 16, pages 510–526. Springer, 2020
work page 2020
-
[7]
Equivariant imaging: Learning beyond the range space
Dongdong Chen, Julián Tachella, and Mike E Davies. Equivariant imaging: Learning beyond the range space. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pages 4379–4388, 2021
work page 2021
-
[8]
Tianlong Chen, Xiaohan Chen, Wuyang Chen, Howard Heaton, Jialin Liu, Zhangyang Wang, and Wotao Yin. Learning to optimize: A primer and a benchmark.Journal of Machine Learning Research, 23(189):1–59, 2022
work page 2022
-
[9]
Theoretical linear convergence of unfolded ista and its practical weights and thresholds
Xiaohan Chen, Jialin Liu, Zhangyang Wang, and Wotao Yin. Theoretical linear convergence of unfolded ista and its practical weights and thresholds. Advances in Neural Information Processing Systems, 31, 2018
work page 2018
-
[10]
Unsupervised range-nullspace learning prior for multispectral images reconstruction
Yurong Chen, Yaonan Wang, and Hui Zhang. Unsupervised range-nullspace learning prior for multispectral images reconstruction. IEEE Transactions on Image Processing, 2025
work page 2025
-
[11]
Null-space diffusion sampling for zero-shot point cloud completion
Xinhua Cheng, Nan Zhang, Jiwen Yu, Yinhuai Wang, Ge Li, and Jian Zhang. Null-space diffusion sampling for zero-shot point cloud completion. In IJCAI, pages 618–626, 2023
work page 2023
-
[12]
Diffusion Posterior Sampling for General Noisy Inverse Problems
Hyungjin Chung, Jeongsol Kim, Michael T Mccann, Marc L Klasky, and Jong Chul Ye. Diffu- sion posterior sampling for general noisy inverse problems. arXiv preprint arXiv:2209.14687, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[13]
An analysis of single-layer networks in unsuper- vised feature learning
Adam Coates, Andrew Ng, and Honglak Lee. An analysis of single-layer networks in unsuper- vised feature learning. In Proceedings of the fourteenth international conference on artificial intelligence and statistics, pages 215–223. JMLR Workshop and Conference Proceedings, 2011
work page 2011
-
[14]
Image denoising with block-matching and 3d filtering
Kostadin Dabov, Alessandro Foi, Vladimir Katkovnik, and Karen Egiazarian. Image denoising with block-matching and 3d filtering. In Image processing: algorithms and systems, neural networks, and machine learning, volume 6064, pages 354–365. SPIE, 2006. 11
work page 2006
-
[15]
A Survey on Diffusion Models for Inverse Problems
Giannis Daras, Hyungjin Chung, Chieh-Hsin Lai, Yuki Mitsufuji, Jong Chul Ye, Peyman Milanfar, Alexandros G Dimakis, and Mauricio Delbracio. A survey on diffusion models for inverse problems. arXiv preprint arXiv:2410.00083, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[16]
Eduardo S. L. Gastal and Manuel M. Oliveira. Domain transform for edge-aware image and video processing. In ACM SIGGRAPH 2011 Papers, SIGGRAPH ’11, New York, NY , USA,
work page 2011
-
[17]
Association for Computing Machinery
-
[18]
Joint sparse and low rank recovery algorithm for compressive hyperspectral imaging
Tatiana Gelvez, Hoover Rueda, and Henry Arguello. Joint sparse and low rank recovery algorithm for compressive hyperspectral imaging. Appl. Opt., 56(24):6785–6795, Aug 2017
work page 2017
-
[19]
Deep equilibrium architectures for inverse problems in imaging
Davis Gilton, Gregory Ongie, and Rebecca Willett. Deep equilibrium architectures for inverse problems in imaging. IEEE Transactions on Computational Imaging, 7:1123–1133, 2021
work page 2021
-
[20]
Tikhonov regularization and total least squares
Gene H Golub, Per Christian Hansen, and Dianne P O’Leary. Tikhonov regularization and total least squares. SIAM journal on matrix analysis and applications, 21(1):185–194, 1999
work page 1999
-
[21]
Improving compressive imaging recovery via measurement augmentation
Romario Gualdrón-Hurtado, Roman Jacome, Leon Suarez, Emmanuel Martinez, and Henry Arguello. Improving compressive imaging recovery via measurement augmentation. InICASSP 2025 - 2025 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pages 1–5, 2025
work page 2025
- [22]
-
[23]
Denoising diffusion probabilistic models
Jonathan Ho, Ajay Jain, and Pieter Abbeel. Denoising diffusion probabilistic models. In H. Larochelle, M. Ranzato, R. Hadsell, M.F. Balcan, and H. Lin, editors,Advances in Neural Information Processing Systems, volume 33, pages 6840–6851. Curran Associates, Inc., 2020
work page 2020
-
[24]
A restoration network as an implicit prior
Yuyang Hu, Mauricio Delbracio, Peyman Milanfar, and Ulugbek S Kamilov. A restoration network as an implicit prior. arXiv preprint arXiv:2310.01391, 2023
-
[25]
Stochastic deep restoration priors for imaging inverse problems
Yuyang Hu, Albert Peng, Weijie Gan, Peyman Milanfar, Mauricio Delbracio, and Ulugbek S Kamilov. Stochastic deep restoration priors for imaging inverse problems. arXiv preprint arXiv:2410.02057, 2024
-
[26]
Kamilov et al. Plug-and-play methods for integrating physical and learned models in compu- tational imaging: Theory, algorithms, and applications. IEEE Sig. Proc. Mag., 40(1):85–97, 2023
work page 2023
-
[27]
Adam: A Method for Stochastic Optimization
Diederik P Kingma and Jimmy Ba. Adam: A method for stochastic optimization. arXiv preprint arXiv:1412.6980, 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[28]
Florian Knoll, Jure Zbontar, Anuroop Sriram, Matthew J Muckley, Mary Bruno, Aaron Defazio, Marc Parente, Krzysztof J Geras, Joe Katsnelson, Hersh Chandarana, Zizhao Zhang, Michal Drozdzalv, Adriana Romero, Michael Rabbat, Pascal Vincent, James Pinkerton, Duo Wang, Nafissa Yakubova, Erich Owens, C Lawrence Zitnick, Michael P Recht, Daniel K Sodickson, and ...
work page 2020
-
[29]
Learning multiple layers of features from tiny images
Alex Krizhevsky, Geoffrey Hinton, et al. Learning multiple layers of features from tiny images. 2009
work page 2009
-
[30]
Learning a projection operator onto the null space of a linear imaging operator
Joseph Kuo, Jason Granstedt, Umberto Villa, and Mark A Anastasio. Learning a projection operator onto the null space of a linear imaging operator. In Medical Imaging 2021: Physics of Medical Imaging, volume 11595, pages 1019–1025. SPIE, 2021
work page 2021
-
[31]
LoDoPaB- CT, a benchmark dataset for low-dose computed tomography reconstruction.Sci
Johannes Leuschner, Maximilian Schmidt, Daniel Otero Baguer, and Peter Maass. LoDoPaB- CT, a benchmark dataset for low-dose computed tomography reconstruction.Sci. Data, 8(1):109, April 2021
work page 2021
-
[32]
Recovery analysis for plug-and-play priors using the restricted eigenvalue condition
Jiaming Liu, Salman Asif, Brendt Wohlberg, and Ulugbek Kamilov. Recovery analysis for plug-and-play priors using the restricted eigenvalue condition. Advances in Neural Information Processing Systems, 34:5921–5933, 2021. 12
work page 2021
-
[33]
Jing Liu and David Saloner. Accelerated MRI with CIRcular cartesian UnderSampling (CIR- CUS): a variable density cartesian sampling strategy for compressed sensing and parallel imaging. Quant. Imaging Med. Surg., 4(1):57–67, February 2014
work page 2014
-
[34]
Zhuang Liu, Hanzi Mao, Chao-Yuan Wu, Christoph Feichtenhofer, Trevor Darrell, and Saining Xie. A convnet for the 2020s. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 11976–11986, 2022
work page 2022
-
[35]
Deep learning face attributes in the wild
Ziwei Liu, Ping Luo, Xiaogang Wang, and Xiaoou Tang. Deep learning face attributes in the wild. In Proceedings of International Conference on Computer Vision (ICCV), December 2015
work page 2015
-
[36]
Decoupled weight decay regularization, 2019
Ilya Loshchilov and Frank Hutter. Decoupled weight decay regularization, 2019
work page 2019
-
[37]
Michael Lustig, David L Donoho, Juan M Santos, and John M Pauly. Compressed sensing mri. IEEE signal processing magazine, 25(2):72–82, 2008
work page 2008
-
[38]
Improving medical image denoising via a lightweight plug-and-play module
Lei Ma, Hulin Kuang, Jin Liu, Chengchao Shen, and Jianxin Wang. Improving medical image denoising via a lightweight plug-and-play module. In 2023 IEEE International Conference on Bioinformatics and Biomedicine (BIBM), pages 1350–1355. IEEE, 2023
work page 2023
-
[39]
Compressive sensing with augmented measurements via generative self-distillation
Emmanuel Martinez, Roman Jacome, Romario Gualdrón-Hurtado, Iñaki Esnaola, and Henry Arguello. Compressive sensing with augmented measurements via generative self-distillation. In 2025 IEEE Statistical Signal Processing Workshop (SSP), pages 31–35, 2025
work page 2025
-
[40]
Algorithm unrolling: Interpretable, efficient deep learning for signal and image processing
Vishal Monga, Yuelong Li, and Yonina C Eldar. Algorithm unrolling: Interpretable, efficient deep learning for signal and image processing. IEEE Signal Processing Magazine, 38(2):18–44, 2021
work page 2021
-
[41]
Neal Parikh and Stephen Boyd. Proximal algorithms. Foundations and Trends in optimization, 1(3):127–239, 2014
work page 2014
-
[42]
The little engine that could: Regularization by denoising (red)
Yaniv Romano, Michael Elad, and Peyman Milanfar. The little engine that could: Regularization by denoising (red). SIAM Journal on Imaging Sciences, 10(4):1804–1844, 2017
work page 2017
-
[43]
U-net: Convolutional networks for biomedical image segmentation
Olaf Ronneberger, Philipp Fischer, and Thomas Brox. U-net: Convolutional networks for biomedical image segmentation. In Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015: 18th International Conference, Munich, Germany, October 5-9, 2015, Proceedings, Part III 18, pages 234–241. Springer, 2015
work page 2015
-
[44]
Plug-and-play methods provably converge with properly trained denoisers
Ernest Ryu, Jialin Liu, Sicheng Wang, Xiaohan Chen, Zhangyang Wang, and Wotao Yin. Plug-and-play methods provably converge with properly trained denoisers. In International Conference on Machine Learning, pages 5546–5557. PMLR, 2019
work page 2019
-
[45]
Theoretical perspectives on deep learning methods in inverse problems
Jonathan Scarlett, Reinhard Heckel, Miguel RD Rodrigues, Paul Hand, and Yonina C Eldar. Theoretical perspectives on deep learning methods in inverse problems. IEEE journal on selected areas in information theory, 3(3):433–453, 2023
work page 2023
-
[46]
Deep null space learning for inverse problems: convergence analysis and rates
Johannes Schwab, Stephan Antholzer, and Markus Haltmeier. Deep null space learning for inverse problems: convergence analysis and rates. Inverse Problems, 35(2):025008, 2019
work page 2019
-
[47]
Iterative projections for signal identification on manifolds: Global recovery guarantees
Parikshit Shah and Venkat Chandrasekaran. Iterative projections for signal identification on manifolds: Global recovery guarantees. In 2011 49th Annual Allerton Conference on Communication, Control, and Computing (Allerton), pages 760–767. IEEE, 2011
work page 2011
-
[48]
Deep unsu- pervised learning using nonequilibrium thermodynamics
Jascha Sohl-Dickstein, Eric Weiss, Niru Maheswaranathan, and Surya Ganguli. Deep unsu- pervised learning using nonequilibrium thermodynamics. In Francis Bach and David Blei, editors, Proceedings of the 32nd International Conference on Machine Learning, volume 37 of Proceedings of Machine Learning Research, pages 2256–2265, Lille, France, 07–09 Jul 2015. PMLR
work page 2015
-
[49]
Siqi Wan, Yehao Li, Jingwen Chen, Yingwei Pan, Ting Yao, Yang Cao, and Tao Mei
Bowen Song, Soo Min Kwon, Zecheng Zhang, Xinyu Hu, Qing Qu, and Liyue Shen. Solv- ing inverse problems with latent diffusion models via hard data consistency. arXiv preprint arXiv:2307.08123, 2023. 13
-
[50]
Denoising diffusion implicit models
Jiaming Song, Chenlin Meng, and Stefano Ermon. Denoising diffusion implicit models. In International Conference on Learning Representations, 2021
work page 2021
-
[51]
Score-based generative modeling through stochastic differential equations
Yang Song, Jascha Sohl-Dickstein, Diederik P Kingma, Abhishek Kumar, Stefano Ermon, and Ben Poole. Score-based generative modeling through stochastic differential equations. In International Conference on Learning Representations, 2021
work page 2021
-
[52]
Image restoration and reconstruction using targeted plug-and-play priors
Afonso M Teodoro, José M Bioucas-Dias, and Mário AT Figueiredo. Image restoration and reconstruction using targeted plug-and-play priors. IEEE Transactions on Computational Imaging, 5(4):675–686, 2019
work page 2019
-
[53]
Fire: Fixed-points of restoration priors for solving inverse problems
Matthieu Terris, Ulugbek S Kamilov, and Thomas Moreau. Fire: Fixed-points of restoration priors for solving inverse problems. arXiv preprint arXiv:2411.18970, 2024
-
[54]
Equivariant plug-and- play image reconstruction
Matthieu Terris, Thomas Moreau, Nelly Pustelnik, and Julian Tachella. Equivariant plug-and- play image reconstruction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 25255–25264, 2024
work page 2024
-
[55]
Dmitry Ulyanov, Andrea Vedaldi, and Victor Lempitsky. Deep image prior. InProceedings of the IEEE conference on computer vision and pattern recognition, pages 9446–9454, 2018
work page 2018
-
[56]
Singanallur V . Venkatakrishnan, Charles A. Bouman, and Brendt Wohlberg. Plug-and-play pri- ors for model based reconstruction. In2013 IEEE Global Conference on Signal and Information Processing, pages 945–948, 2013
work page 2013
-
[57]
Gan prior based null-space learning for consistent super-resolution
Yinhuai Wang, Yujie Hu, Jiwen Yu, and Jian Zhang. Gan prior based null-space learning for consistent super-resolution. In Proceedings of the AAAI Conference on Artificial Intelligence, volume 37, pages 2724–2732, 2023
work page 2023
-
[58]
Unlimited-size diffusion restoration
Yinhuai Wang, Jiwen Yu, Runyi Yu, and Jian Zhang. Unlimited-size diffusion restoration. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 1160–1167, 2023
work page 2023
-
[59]
Zero-shot image restoration using denoising diffusion null-space model
Yinhuai Wang, Jiwen Yu, and Jian Zhang. Zero-shot image restoration using denoising diffusion null-space model. arXiv preprint arXiv:2212.00490, 2022
-
[60]
Iterative reconstruction techniques for computed tomography part 1: technical principles
Martin J Willemink, Pim A de Jong, Tim Leiner, Linda M de Heer, Rutger AJ Nievelstein, Ricardo PJ Budde, and Arnold MR Schilham. Iterative reconstruction techniques for computed tomography part 1: technical principles. European radiology, 23:1623–1631, 2013
work page 2013
-
[61]
Restormer: Efficient transformer for high-resolution image restoration
Zamir et al. Restormer: Efficient transformer for high-resolution image restoration. In IEEE/CVF CVPR, pages 5728–5739, 2022
work page 2022
-
[62]
Zhiyuan Zha, Bihan Wen, Xin Yuan, Saiprasad Ravishankar, Jiantao Zhou, and Ce Zhu. Learning nonlocal sparse and low-rank models for image compressive sensing: Nonlocal sparse and low-rank modeling. IEEE Signal Processing Magazine, 40(1):32–44, 2023
work page 2023
-
[63]
Plug-and- play image restoration with deep denoiser prior
Kai Zhang, Yawei Li, Wangmeng Zuo, Lei Zhang, Luc Van Gool, and Radu Timofte. Plug-and- play image restoration with deep denoiser prior. IEEE Transactions on Pattern Analysis and Machine Intelligence, 44(10):6360–6376, 2021
work page 2021
-
[64]
Beyond a gaussian denoiser: Residual learning of deep cnn for image denoising
Kai Zhang, Wangmeng Zuo, Yunjin Chen, Deyu Meng, and Lei Zhang. Beyond a gaussian denoiser: Residual learning of deep cnn for image denoising. IEEE transactions on image processing, 26(7):3142–3155, 2017
work page 2017
-
[65]
Places: A 10 million image database for scene recognition
Bolei Zhou, Agata Lapedriza, Aditya Khosla, Aude Oliva, and Antonio Torralba. Places: A 10 million image database for scene recognition. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017
work page 2017
-
[66]
Denoising diffusion models for plug-and-play image restoration
Yuanzhi Zhu, Kai Zhang, Jingyun Liang, Jiezhang Cao, Bihan Wen, Radu Timofte, and Luc Van Gool. Denoising diffusion models for plug-and-play image restoration. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, pages 1219–1229, June 2023. 14 A Technical Appendices A.1 Settings for experiment in Figure 1 ...
work page 2023
-
[67]
Deep null space network (DNSN)[45]: ˆx=H †y+ (I−H †H)R(H†y)
-
[68]
Deep decomposition network cascade (DDN-C) [ 6]: ˆx=H †y+ P r(Rr(H†y)) + Pn(Rn(H†y+ P r(Rr(H†y))))
-
[69]
• Network R and Rn: is a lightweight version of the U-Net architecture for image segmenta- tion
Deep decomposition network independent (DDN-I) [ 6]: ˆx=H †y+ P r(Rr(H†y)) + Pn(Rn(H†y)) We used the source code 2 of [6] to implement the modelsR,R r andR n. • Network R and Rn: is a lightweight version of the U-Net architecture for image segmenta- tion. It features an encoder-decoder structure with skip connections. The encoder consists of five convolut...
-
[70]
(3) on each dataset further improves it
The results show that the QR- initialized matrix provides good invertibility across all datasets, and that optimizing S via Eq. (3) on each dataset further improves it. Thus, the data distribution can enhance the data-driven invertibility of an already orthogonal matrix. Testing S on in-distribution samples yields the best invertibility (bold), while dive...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.