Safe Output Regulation of Coupled Hyperbolic PDE-ODE Systems
Pith reviewed 2026-05-17 00:48 UTC · model grok-4.3
The pith
A nonovershooting backstepping controller with observer and estimator achieves safe output regulation and exponential tracking for coupled 2x2 hyperbolic PDE-ODE systems with disturbances.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
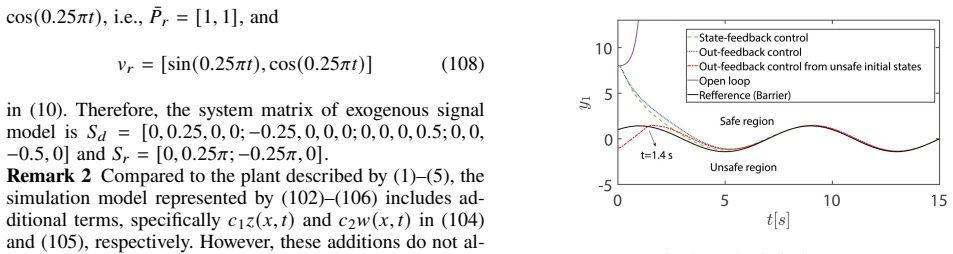
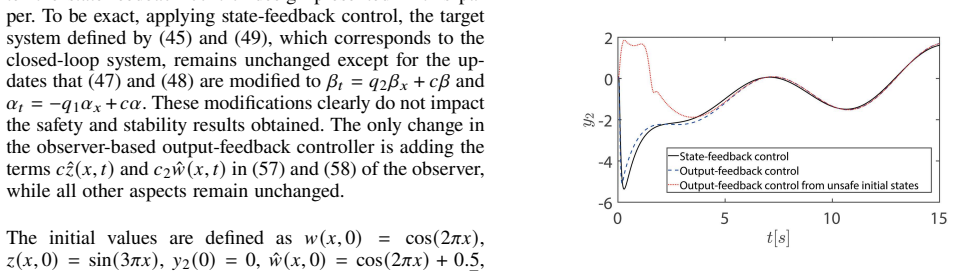
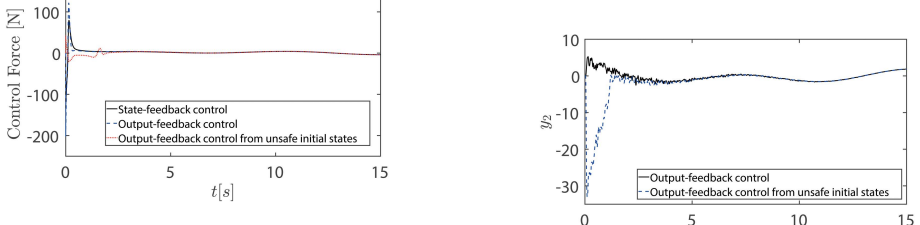
The central claim is that for a class of coupled 2×2 hyperbolic PDE-ODE systems with fully distributed disturbances, a state-feedback controller designed via the nonovershooting backstepping method, combined with a state observer and disturbance estimator, guarantees that the regulated output stays in or is rescued to the safe region in prescribed time, the output tracking error converges exponentially to zero, estimation errors converge exponentially, and all closed-loop signals remain bounded. This is illustrated in a UAV delivery scenario with a cable-suspended payload avoiding barriers.
What carries the argument
The nonovershooting backstepping method, which designs the controller to prevent overshoot in the regulated output while achieving regulation, integrated with explicit bounds from the observer and disturbance estimator to handle uncertainties.
If this is right
- If the regulated output starts in the safe region, it stays there under the control.
- Otherwise, the output enters the safe region within a prescribed finite time.
- The output tracking error decays exponentially to zero.
- Observer and disturbance estimation errors also decay exponentially to zero.
- All signals in the closed loop stay bounded.
Where Pith is reading between the lines
- This design could be adapted to systems with different boundary conditions or additional nonlinearities.
- Applications beyond UAVs, such as traffic flow or chemical processes modeled similarly, might benefit from the prescribed-time safety feature.
- Experimental validation on physical systems would test the robustness to modeling errors not covered in the analysis.
Load-bearing premise
The system must fit the specific coupled 2x2 hyperbolic PDE-ODE structure with the regulated output being the state furthest from the actuator, allowing derivation of explicit estimation error bounds.
What would settle it
A simulation or experiment where the regulated output, starting outside the safe region, fails to enter it within the prescribed time or where the tracking error does not converge to zero would disprove the guarantees.
Figures





read the original abstract
This paper presents a safe output regulation control strategy for a class of systems modeled by a coupled $2\times 2$ hyperbolic PDE-ODE structure, subject to fully distributed disturbances throughout the system. A state-feedback controller is developed by the {{nonovershooting backstepping}} method to simultaneously achieve exponential output regulation and enforce safety constraints on the regulated output that is the state furthest from the control input. To handle unmeasurable states and external disturbances, a state observer and a disturbance estimator are designed. Explicit bounds on the estimation errors are derived and used to construct a robust safe regulator that accounts for the uncertainties. The proposed control scheme guarantees that: 1) If the regulated output is initially within the safe region, it remains there; otherwise, it will be rescued to the safety within a prescribed time; 2) The output tracking error converges to zero exponentially; 3) The observer accurately estimates both the distributed states and external disturbances, with estimation errors converging to zero exponentially; 4) All signals in the closed-loop system remain bounded. The effectiveness of the proposed method is demonstrated through a UAV delivery scenario with a cable-suspended payload, where the payload is regulated to track a desired reference while avoiding collisions with barriers.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a safe output regulation strategy for coupled 2×2 hyperbolic PDE-ODE systems subject to fully distributed disturbances. A nonovershooting backstepping state-feedback controller is designed to enforce safety constraints on the regulated output (the state furthest from actuation) while achieving exponential regulation to a reference. A state observer and disturbance estimator are introduced, with explicit bounds on their estimation errors used to construct a robust safe regulator. The central claims are that the regulated output either remains inside the safe set or is driven inside within prescribed time, the output tracking error converges exponentially to zero, observer and estimator errors converge exponentially to zero, and all closed-loop signals remain bounded. The approach is illustrated on a UAV cable-suspended payload delivery example.
Significance. If the derivations of the explicit error bounds and their integration into the nonovershooting barrier analysis are rigorous, the work would represent a meaningful extension of backstepping-based boundary control to safety-critical regulation problems in hyperbolic systems with uncertainties. The combination of prescribed-time rescue, exponential convergence, and robustness to distributed disturbances addresses a practically relevant gap, with the UAV application providing a concrete demonstration of potential utility in engineering systems.
major comments (2)
- [Robust safe regulator construction and target-system barrier analysis] The skeptic concern is valid: the manuscript derives explicit bounds on observer and disturbance estimator errors but does not appear to quantify how these exponential envelopes (whose constants depend on disturbance norm and initial conditions) interact with the prescribed-time gain schedule to keep the safety margin strictly positive during the finite-time rescue phase. This analysis is load-bearing for claim 1 in the abstract.
- [Observer and disturbance estimator design] In the error-system analysis for the observer under fully distributed disturbances, the Lyapunov or kernel-based bounds must be shown to remain compatible with the nonovershooting property without requiring additional conservatism that could invalidate the prescribed-time guarantee; the current presentation leaves this interaction unexamined.
minor comments (2)
- [Problem formulation] Notation for the coupling terms between the PDE and ODE subsystems could be introduced more explicitly in the problem formulation to aid readers.
- [Numerical example] The UAV example would benefit from a brief statement of the specific parameter values used for the cable-suspended payload model.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each of the major comments in detail below and indicate the changes we will implement in the revised version.
read point-by-point responses
-
Referee: [Robust safe regulator construction and target-system barrier analysis] The skeptic concern is valid: the manuscript derives explicit bounds on observer and disturbance estimator errors but does not appear to quantify how these exponential envelopes (whose constants depend on disturbance norm and initial conditions) interact with the prescribed-time gain schedule to keep the safety margin strictly positive during the finite-time rescue phase. This analysis is load-bearing for claim 1 in the abstract.
Authors: We appreciate the referee pointing out this potential gap in the exposition. The manuscript does derive the explicit bounds and incorporates them into the barrier analysis by defining a modified safety set that accounts for the estimation error envelope. The prescribed-time gain schedule is then tuned to ensure the transformed state trajectory respects the adjusted barrier, keeping the original safety margin positive. To make this rigorous and transparent, we will revise the target-system analysis section to include an explicit lemma showing the condition on the gain parameter that guarantees the margin positivity, using the derived constants from the error bounds. revision: yes
-
Referee: [Observer and disturbance estimator design] In the error-system analysis for the observer under fully distributed disturbances, the Lyapunov or kernel-based bounds must be shown to remain compatible with the nonovershooting property without requiring additional conservatism that could invalidate the prescribed-time guarantee; the current presentation leaves this interaction unexamined.
Authors: The error bounds for the observer and estimator are obtained via Lyapunov analysis on the error system, yielding exponential convergence with rates that can be made arbitrarily fast by design parameters. These rates are chosen to be compatible with the nonovershooting controller by ensuring the error decay is faster than the prescribed-time convergence, thus the uncertainty term vanishes before the rescue completes without extra conservatism. We will add a discussion in the revised manuscript to explicitly link the observer convergence rate to the nonovershooting condition, confirming that no additional conservatism is introduced that affects the prescribed-time guarantee. revision: yes
Circularity Check
No significant circularity; derivation is self-contained via standard backstepping and explicit error bounds from the model.
full rationale
The paper's central claims rest on designing a state observer and disturbance estimator for the 2x2 hyperbolic PDE-ODE system, deriving explicit exponential bounds on their errors via Lyapunov or kernel methods, and inserting those bounds into a nonovershooting backstepping controller to enforce safety. These steps are constructed directly from the plant equations and target-system transformations rather than by fitting parameters to data or reducing to prior self-citations by definition. The safety guarantees (nonovershooting or prescribed-time rescue) and exponential regulation follow from the closed-loop target dynamics with the inserted bounds; no load-bearing premise collapses to an input by construction. The approach is therefore independent of the specific fitted quantities or self-referential uniqueness theorems.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The plant is a coupled 2x2 hyperbolic PDE-ODE system with fully distributed disturbances.
- domain assumption Explicit bounds on observer and disturbance estimator errors can be derived.
Reference graph
Works this paper leans on
-
[1]
Disturbance rejection in 2×2 linear hyperbolic systems,
A. Aamo, “Disturbance rejection in 2×2 linear hyperbolic systems,” IEEE Trans. Autom. Control, 58, 1095–1106, 2013
work page 2013
-
[2]
Anfinsen, H., Aamo, O. “Disturbance rejection in general heterodirectional 1-D linear hyperbolic systems using collocated sensing and control,”Automatica, 76, 230-242, 2017
work page 2017
-
[3]
Prescribed-time safety design for strict-feedback nonlinear systems,
I. Abel, D. Steeves, M. Krstic, M. Jankovic, “Prescribed-time safety design for strict-feedback nonlinear systems,”IEEE Trans. Autom. Control, 69(3): 1464–1479, 2023
work page 2023
-
[4]
Constrained control of multi- input systems with distinct input delays,
I. Abel, M. Jankovic, and M. Krstic, “Constrained control of multi- input systems with distinct input delays,”Int. J. Robust Nonlin., 34(10): 6659–6682, 2024
work page 2024
-
[5]
Control barrier function based quadratic programs for safety critical systems,
A. D. Ames, X. Xu, J. W. Grizzle, and P. Tabuada. “Control barrier function based quadratic programs for safety critical systems,”IEEE Trans. Autom. Control, 62(8):3861–3876, 2016
work page 2016
-
[6]
A fixed-time stable adaptation law for safety-critical control under parametric uncertainty,
M. Black, E. Arabi, and D. Panagou, “A fixed-time stable adaptation law for safety-critical control under parametric uncertainty,” inProc. IEEE European Control Conf., pp. 1328–1333, 2021
work page 2021
-
[7]
Strictly proper control design for the stabilization of 2×2 linear hyperbolic ODE-PDE-ODE systems,
D. Bou. Saba, F. Bribiesca-Argomedo, M. D. Loreto and D. Eberard, “Strictly proper control design for the stabilization of 2×2 linear hyperbolic ODE-PDE-ODE systems,” inProc. 58th IEEE Conf. Decis. Control, pp. 4996–5001, 2019
work page 2019
-
[8]
Local exponential 𝐻2 stabilization of a 2×2 quasilinear hyperbolic system using backstepping,
J.M. Coron, R. Vazquez, M. Krstic and G. Bastin, “ Local exponential 𝐻2 stabilization of a 2×2 quasilinear hyperbolic system using backstepping,”SIAM J. Control Optim., 51(3), pp. 2005–2035, 2013
work page 2005
-
[9]
Output feedback control of general linear heterodirectional hyperbolic ODE-PDE-ODE systems,
J. Deutscher, N. Gehring and R. Kern “Output feedback control of general linear heterodirectional hyperbolic ODE-PDE-ODE systems,” Automatica, 95, pp. 472–480, 2018
work page 2018
-
[10]
J. Deutscher, N. Gehring, R. Kern “Output feedback control of general linear heterodirectional hyperbolic PDE-ODE systems with spatially-varying coefficients,”Int. J. Control, 92(10), pp.2274–2290, 2019
work page 2019
-
[11]
J. Deutscher, “Output regulation for general linear heterodirectional hyperbolic systems with spatially-varying coefficients,”Automatica, 85, pp.34–42, 2017
work page 2017
-
[12]
A backstepping approach to output regulation for coupled linear wave-ODE systems,
J. Deutscher, J. Gabriel, “A backstepping approach to output regulation for coupled linear wave-ODE systems,”Automatica, 123, 109338, 2021. 16
work page 2021
-
[13]
S. Koga, M. Krstic, “Safe PDE backstepping QP control with high relative degree CBFs: Stefan model with actuator dynamics,”IEEE Trans. Autom. Control, DOI: 10.1109/TAC.2023.3250514, 2023
- [14]
-
[15]
Nonovershooting control of strict-feedback nonlinear systems,
M. Krstic, M. Bement, “Nonovershooting control of strict-feedback nonlinear systems,”IEEE Trans. Autom. Control, 51, pp. 1938–1943, 2006
work page 1938
-
[16]
Mean-nonovershooting control of stochastic nonlinear systems,
W. Li, M. Krstic, “Mean-nonovershooting control of stochastic nonlinear systems,”IEEE Trans. Autom. Control, 66 (12), pp: 5756– 5771, 2020
work page 2020
-
[17]
Stabilization of coupled linear heterodirectional hyperbolic PDE- ODE systems,
F. Di Meglio, F. Bribiesca-Argomedo, L. Hu and M. Krstic, “Stabilization of coupled linear heterodirectional hyperbolic PDE- ODE systems,”Automatica, 87, pp. 281–289, 2018
work page 2018
-
[18]
Q. Nguyen and K. Sreenath, “Exponential control barrier functions for enforcing high relative-degree safety-critical constraints,”in Proc. Amer. Control Conf, pp. 322–328, 2016
work page 2016
-
[19]
R. Vazquez and M. Krstic, “Marcum𝑄-functions and explicit kernels for stabilization of 2×2 linear hyperbolic systems with constant coefficients,”Syst. Control Lett., 68, pp. 33–42, 2014
work page 2014
-
[20]
Backstepping boundary stabilization and state estimation of a 2×2 linear hyperbolic system,
R. Vazquez, M. Krstic and J.M. Coron, “Backstepping boundary stabilization and state estimation of a 2×2 linear hyperbolic system,” in50th IEEE Conference on Decision and Control and European Control Conference, pp. 4937–4942, 2011
work page 2011
-
[21]
J. Wang and M. Krstic, “Delay-compensated control of sandwiched ODE-PDE-ODE hyperbolic systems for oil drilling and disaster relief,”Automatica, 120, pp. 109131, 2020
work page 2020
-
[22]
J. Wang and M. Krstic,PDE Control of String-Actuated Motion, Princeton University Press, 2022
work page 2022
-
[23]
Control of a 2×2 coupled linear hyperbolic system sandwiched between two ODEs,
J. Wang, M. Krstic and Y. Pi, “Control of a 2×2 coupled linear hyperbolic system sandwiched between two ODEs,”Int. J. Robust Nonlin., 28, pp. 3987–4016, 2018
work page 2018
-
[24]
Output-positive adaptive control of hyperbolic PDE-ODE cascades,
J. Wang and M. Krstic, “Output-positive adaptive control of hyperbolic PDE-ODE cascades,” arXiv:2309.05596v3, 2025
-
[25]
Control barrier functions for systems with high relative degree,
W. Xiao and C. Belta, “Control barrier functions for systems with high relative degree,” inProc. Conf. Decis. Control, pp. 474–479, 2019
work page 2019
-
[26]
High order control barrier functions,
W. Xiao and C. Belta, “High order control barrier functions,”IEEE Trans. Autom. Control, 67(7), pp. 3655–3662, 2021
work page 2021
-
[27]
Output regulation boundary control of first- order coupled linear MIMO hyperbolic PIDE systems,
X. Xu and S. Dubljevic, “Output regulation boundary control of first- order coupled linear MIMO hyperbolic PIDE systems,”International Journal of Control, 93(3), pp: 410–423, 2020
work page 2020
-
[28]
State feedback regulator design for coupled linear wave equations,
J. Gabriel, J. Deutscher, “State feedback regulator design for coupled linear wave equations,”In Proc. European Control Conference (ECC), Limassol, Cyprus, pp. 3013–3018, 2018
work page 2018
-
[29]
Output regulation of anti-stable coupled wave equations via the backstepping technique,
J.-J. Gu, J.-M. Wang, Y.-P. Guo, “Output regulation of anti-stable coupled wave equations via the backstepping technique,”IET Control Theory and Applications, 12, 431–445, 2018
work page 2018
-
[30]
Output regulation for general heterodirectional linear hyperbolic PDEs coupled with nonlinear ODEs,
A. Irscheid, J. Deutscher, N. Gehring, J. Rudolph, “Output regulation for general heterodirectional linear hyperbolic PDEs coupled with nonlinear ODEs,”Automatica, 148, 110748, 2023
work page 2023
-
[31]
Output regulation and tracking for linear ODE-hyperbolic PDE-ODE systems,
J. Redaud, F. Bribiesca-Argomedo, J. Auriol, “Output regulation and tracking for linear ODE-hyperbolic PDE-ODE systems,”Automatica, 162, 111503, 2024
work page 2024
-
[32]
Yoshida,Lectures on differential and integral equations, volume
K. Yoshida,Lectures on differential and integral equations, volume
-
[33]
Interscience Publishers, 1960. 17
work page 1960
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.