Recognition: no theorem link
ClawMobile: Rethinking Smartphone-Native Agentic Systems
Pith reviewed 2026-05-15 19:18 UTC · model grok-4.3
The pith
ClawMobile uses hierarchical separation of reasoning and control to stabilize smartphone agent systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
ClawMobile adopts a hierarchical architecture that separates high-level language reasoning from structured, deterministic control pathways, improving execution stability and reproducibility on real devices.
What carries the argument
Hierarchical architecture separating high-level language reasoning from structured, deterministic control pathways
If this is right
- Agent execution on smartphones becomes more stable when high-level plans are executed through fixed control mechanisms rather than direct LLM commands.
- Mobile LLM runtimes benefit from explicit coordination between probabilistic and deterministic components.
- Key remaining challenges include improving efficiency and adaptability while maintaining stability.
- Open-sourcing the implementation allows others to test and extend these design principles on real hardware.
Where Pith is reading between the lines
- Similar hierarchical designs could apply to other resource-constrained platforms like embedded systems.
- The separation might simplify testing by allowing independent verification of control pathways.
- Developers could use this model to integrate LLMs with existing mobile automation tools more reliably.
- Future work might explore dynamic switching between reasoning modes based on task complexity.
Load-bearing premise
Separating high-level probabilistic reasoning from deterministic control pathways produces measurable gains in stability and reproducibility on real smartphones.
What would settle it
Comparative experiments measuring task completion rates, error rates, and run-to-run consistency on physical smartphones with and without the hierarchical separation.
Figures
read the original abstract
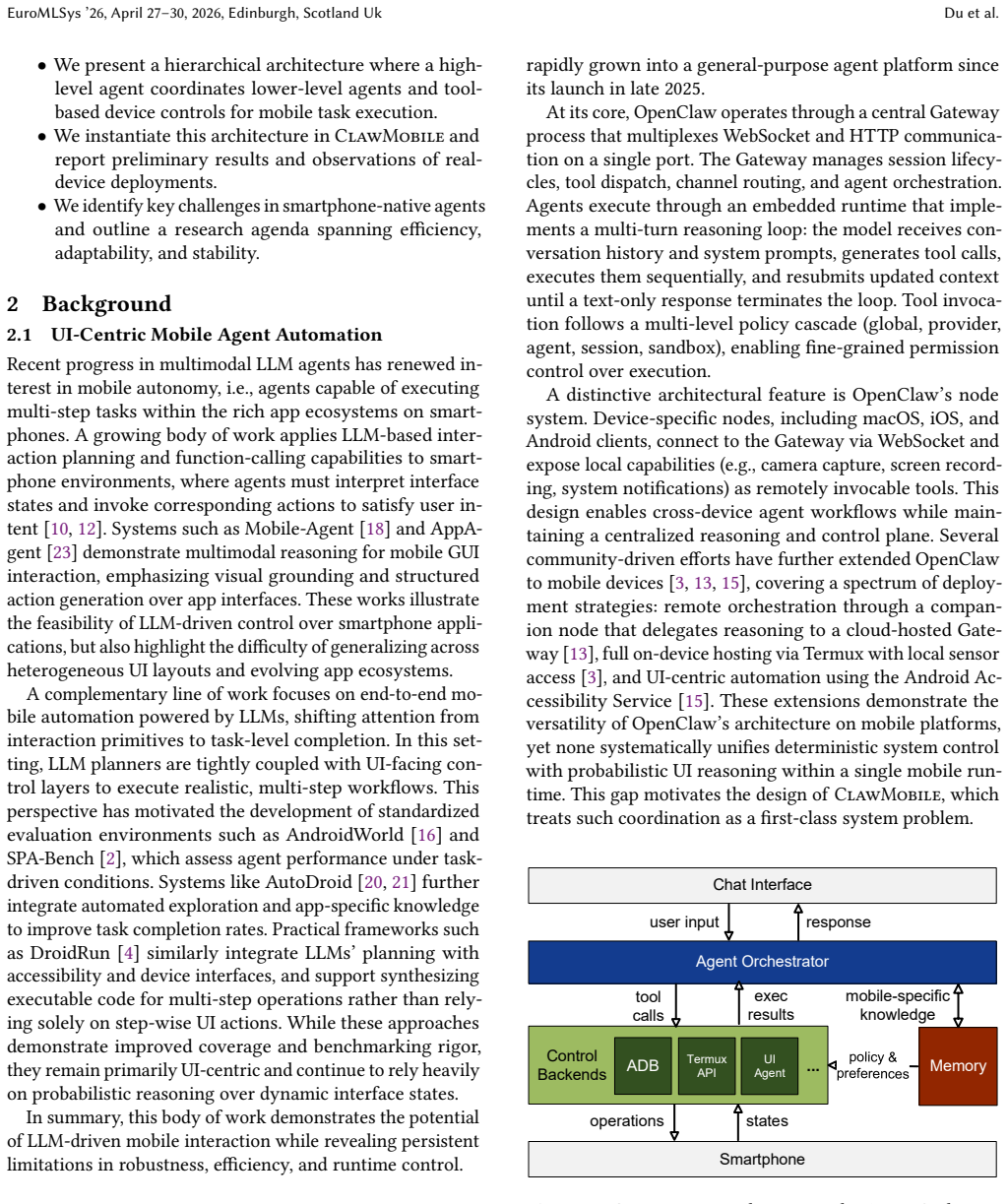
Smartphones represent a uniquely challenging environment for agentic systems. Unlike cloud or desktop settings, mobile devices combine constrained execution contexts, fragmented control interfaces, and rapidly changing application states. As large language models (LLMs) evolve from conversational assistants to action-oriented agents, achieving reliable smartphone-native autonomy requires rethinking how reasoning and control are composed. We introduce ClawMobile as a concrete exploration of this design space. ClawMobile adopts a hierarchical architecture that separates high-level language reasoning from structured, deterministic control pathways, improving execution stability and reproducibility on real devices. Using ClawMobile as a case study, we distill the design principles for mobile LLM runtimes and identify key challenges in efficiency, adaptability, and stability. We argue that building robust smartphone-native agentic systems demands principled coordination between probabilistic planning and deterministic system interfaces. The implementation is open-sourced~\footnote{https://github.com/ClawMobile/ClawMobile} to facilitate future exploration.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces ClawMobile, a hierarchical architecture for smartphone-native agentic systems that separates high-level language reasoning from structured, deterministic control pathways. It claims this design improves execution stability and reproducibility on real devices, uses the system as a case study to distill design principles for mobile LLM runtimes, identifies challenges in efficiency, adaptability, and stability, and open-sources the implementation.
Significance. If the stability and reproducibility improvements are empirically demonstrated, the work could meaningfully advance reliable LLM agents in constrained mobile environments by clarifying coordination between probabilistic planning and deterministic interfaces. The open-sourced implementation is a clear strength that supports reproducibility and community follow-up.
major comments (2)
- [Abstract] Abstract: The central claim that the hierarchical separation 'improving execution stability and reproducibility on real devices' is asserted without any supporting experiments, metrics (e.g., success rates, variance, latency), ablation studies, or comparisons to non-hierarchical baselines under constrained execution and fragmented interfaces.
- [Evaluation (or equivalent)] The manuscript provides no evaluation section, results tables, or quantitative benchmarks that would substantiate the load-bearing assertion of measurable gains from the architecture; the contribution therefore rests on an unevidenced design choice rather than demonstrated outcomes.
minor comments (1)
- [Abstract] The GitHub footnote could include a direct link or DOI for easier access.
Simulated Author's Rebuttal
We thank the referee for the constructive comments highlighting the need for empirical support. The manuscript is a design exploration of hierarchical agentic systems for smartphones, but we agree the abstract and contribution would benefit from more cautious language and added evaluation to substantiate the stability claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the hierarchical separation 'improving execution stability and reproducibility on real devices' is asserted without any supporting experiments, metrics (e.g., success rates, variance, latency), ablation studies, or comparisons to non-hierarchical baselines under constrained execution and fragmented interfaces.
Authors: We agree the abstract asserts an improvement without quantitative backing. In revision we will rephrase the relevant sentence to present the separation as a design intended to improve stability and reproducibility, grounded in the challenges and rationale detailed in the body. We will also add a new Evaluation section with preliminary results including task success rates, outcome variance, latency measurements, and comparisons against non-hierarchical baselines on real devices. revision: yes
-
Referee: [Evaluation (or equivalent)] The manuscript provides no evaluation section, results tables, or quantitative benchmarks that would substantiate the load-bearing assertion of measurable gains from the architecture; the contribution therefore rests on an unevidenced design choice rather than demonstrated outcomes.
Authors: The current version emphasizes architectural principles and open-source implementation as a case study rather than a full empirical benchmark paper. We accept that this leaves the stability claim unsubstantiated. The revised manuscript will include an Evaluation section reporting quantitative results on a set of smartphone agent tasks, with metrics for success rate, reproducibility (variance across runs), latency, and direct comparisons to non-hierarchical LLM-agent baselines under realistic mobile constraints. revision: yes
Circularity Check
No circularity: architectural proposal without derivations or fitted predictions
full rationale
The paper presents ClawMobile as a hierarchical system design separating high-level LLM reasoning from deterministic control pathways, asserting gains in stability and reproducibility on mobile devices. No equations, parameter fittings, predictions derived from subsets of data, or self-citations appear in the abstract or described full text. The central claims are design assertions and distilled principles rather than results obtained by reducing to prior inputs by construction. The work is therefore self-contained as an engineering case study with no load-bearing circular steps.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Streamline AI Agent Tool Interactions
Amazon 2026. Streamline AI Agent Tool Interactions. https://aws.amazon.com/blogs/machine-learning/streamline-ai- agent-tool-interactions-connect-api-gateway-to-agentcore-gateway- with-mcp
work page 2026
-
[2]
Jingxuan Chen, Derek Yuen, Bin Xie, Yuhao Yang, Gongwei Chen, Zhihao Wu, Li Yixing, Xurui Zhou, Weiwen Liu, Shuai Wang, Kai- wen Zhou, Rui Shao, Liqiang Nie, Yasheng Wang, Jianye HAO, Jun Wang, and Kun Shao. 2025. SPA-BENCH: A COMPRE- HENSIVE BENCHMARK FOR SMARTPHONE AGENT EVALU- ATION. InInternational Conference on Learning Representations, Y. Yue, A. Ga...
work page 2025
- [3]
- [4]
-
[5]
Hongchao Du, Shangyu Wu, Arina Kharlamova, Nan Guan, and Chun Jason Xue. 2025. FlexInfer: Breaking Memory Constraint via Flexible and Efficient Offloading for On-Device LLM Inference. In Proceedings of the 5th Workshop on Machine Learning and Systems, EuroMLSys 2025, World Trade Center, Rotterdam, The Netherlands, 30 March 2025- 3 April 2025, Eiko Yoneki ...
- [6]
- [7]
-
[8]
Jakub Hoscilowicz and Artur Janicki. 2025. Clickagent: Enhancing ui location capabilities of autonomous agents. InProceedings of the 26th Annual Meeting of the Special Interest Group on Discourse and Dialogue. 471–476
work page 2025
- [9]
-
[10]
Guangyi Liu, Pengxiang Zhao, Yaozhen Liang, Liang Liu, Yaxuan Guo, Han Xiao, Weifeng Lin, Yuxiang Chai, Yue Han, Shuai Ren, Hao Wang, Xiaoyu Liang, WenHao Wang, Tianze Wu, Zhengxi Lu, Siheng Chen, LiLinghao, Hao Wang, Guanjing Xiong, Yong Liu, and Hongsheng Li
-
[11]
LLM-Powered GUI Agents in Phone Automation: Surveying Progress and Prospects.Transactions on Machine Learning Research (2025).https://openreview.net/forum?id=yWQqoi1G1K
work page 2025
- [12]
-
[13]
Dang Nguyen, Jian Chen, Yu Wang, Gang Wu, Namyong Park, Zheng- mian Hu, Hanjia Lyu, Junda Wu, Ryan Aponte, Yu Xia, Xintong Li, Jing Shi, Hongjie Chen, Viet Dac Lai, Zhouhang Xie, Sungchul Kim, Ruiyi Zhang, Tong Yu, Mehrab Tanjim, Nesreen K. Ahmed, Puneet Mathur, Seunghyun Yoon, Lina Yao, Branislav Kveton, Jihyung Kil, Thien Huu Nguyen, Trung Bui, Tianyi Z...
-
[14]
OpenClaw 2026. Openclaw Android platforms. https://docs.openclaw.ai/platforms/android
work page 2026
-
[15]
OpenClaw: Your own personal AI assistant
OpenClaw 2026. OpenClaw: Your own personal AI assistant. https://github.com/openclaw/openclaw (accessed 2026-02-25)
work page 2026
-
[16]
PhoneClaw: Automate Android phones entirely without root from a side-loaded APK
PhoneClaw 2026. PhoneClaw: Automate Android phones entirely without root from a side-loaded APK. https://github.com/rohanarun/phoneclaw
work page 2026
-
[17]
Christopher Rawles, Sarah Clinckemaillie, Yifan Chang, Jonathan Waltz, Gabrielle Lau, Marybeth Fair, Alice Li, William Bishop, Wei Li, Folawiyo Campbell-Ajala, Daniel Toyama, Robert Berry, Divya Tyama- gundlu, Timothy Lillicrap, and Oriana Riva. 2025. AndroidWorld: A Dynamic Benchmarking Environment for Autonomous Agents. arXiv:2405.14573 [cs.AI]https://a...
work page internal anchor Pith review Pith/arXiv arXiv 2025
- [18]
- [19]
-
[20]
Yiqin Wang, Haoji Zhang, Jingqi Tian, and Yansong Tang. 2025. Ponder & press: Advancing visual gui agent towards general computer control. InFindings of the Association for Computational Linguistics: ACL 2025. 1461–1473
work page 2025
- [21]
-
[22]
Hao Wen, Yuanchun Li, Guohong Liu, Shanhui Zhao, Tao Yu, Toby Jia-Jun Li, Shiqi Jiang, Yunhao Liu, Yaqin Zhang, and Yunxin Liu. 2024. AutoDroid: LLM-powered Task Automation in Android. InProceed- ings of the 30th Annual International Conference on Mobile Computing and Networking(Washington D.C., DC, USA)(ACM MobiCom ’24). Association for Computing Machine...
-
[23]
Liangxuan Wu, Yanjie Zhao, Chao Wang, Tianming Liu, and Haoyu Wang. 2024. A first look at llm-powered smartphones. InProceedings of the 39th IEEE/ACM International Conference on Automated Software Engineering Workshops. 208–217
work page 2024
-
[24]
Chi Zhang, Zhao Yang, Jiaxuan Liu, Yanda Li, Yucheng Han, Xin Chen, Zebiao Huang, Bin Fu, and Gang Yu. 2025. AppAgent: Multimodal Agents as Smartphone Users. InProceedings of the 2025 CHI Conference on Human Factors in Computing Systems (CHI ’25). Association for Computing Machinery, New York, NY, USA, Article 70, 20 pages.https: //doi.org/10.1145/3706598.3713600
-
[25]
Boyuan Zheng, Boyu Gou, Jihyung Kil, Huan Sun, and Yu Su. 2024. Gpt-4v (ision) is a generalist web agent, if grounded.arXiv preprint arXiv:2401.01614(2024)
work page internal anchor Pith review arXiv 2024
- [26]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.