Recognition: 2 theorem links
· Lean TheoremThe Alignment Flywheel: A Governance-Centric Hybrid MAS for Architecture-Agnostic Safety
Pith reviewed 2026-05-15 19:02 UTC · model grok-4.3
The pith
The Alignment Flywheel decouples decision generation from safety governance so that many failures can be fixed by patching the Safety Oracle rather than retraining the core component.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The Alignment Flywheel formalizes a governance-centric hybrid MAS that decouples decision generation from safety governance. A Proposer representing any autonomous decision component generates candidate trajectories, a Safety Oracle returns raw safety signals through a stable interface, an enforcement layer applies explicit risk policy at runtime, and a governance MAS supervises the Oracle through auditing, uncertainty-driven verification, and versioned refinement. The central engineering principle is patch locality: many newly observed safety failures can be mitigated by updating the governed oracle artifact and its release pipeline rather than retracting or retraining the underlying决策组件.
What carries the argument
Patch locality through the governed Safety Oracle, which supplies raw safety signals via a stable interface that the governance MAS can audit and refine independently of the Proposer.
Load-bearing premise
A stable implementation-agnostic interface exists for the Safety Oracle to deliver reliable raw safety signals, and the governance MAS can audit and refine it without introducing new failure modes or dependencies on the Proposer.
What would settle it
A concrete safety failure observed in deployment that cannot be mitigated by any update to the Safety Oracle and its release pipeline, or that requires direct changes to the Proposer to resolve.
Figures


read the original abstract
Multi-agent systems provide mature methodologies for role decomposition, coordination, and normative governance, capabilities that remain essential as increasingly powerful autonomous decision components are embedded within agent-based systems. While learned and generative models substantially expand system capability, their safety behavior is often entangled with training, making it opaque, difficult to audit, and costly to update after deployment. This paper formalizes the Alignment Flywheel as a governance-centric hybrid MAS architecture that decouples decision generation from safety governance. A Proposer, representing any autonomous decision component, generates candidate trajectories, while a Safety Oracle returns raw safety signals through a stable interface. An enforcement layer applies explicit risk policy at runtime, and a governance MAS supervises the Oracle through auditing, uncertainty-driven verification, and versioned refinement. The central engineering principle is patch locality: many newly observed safety failures can be mitigated by updating the governed oracle artifact and its release pipeline rather than retracting or retraining the underlying decision component. The architecture is implementation-agnostic with respect to both the Proposer and the Safety Oracle, and specifies the roles, artifacts, protocols, and release semantics needed for runtime gating, audit intake, signed patching, and staged rollout across distributed deployments. The result is a hybrid MAS engineering framework for integrating highly capable but fallible autonomous systems under explicit, version-controlled, and auditable oversight.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes the Alignment Flywheel, a governance-centric hybrid multi-agent system architecture that decouples a Proposer (any autonomous decision component) from safety oversight via a Safety Oracle that supplies raw safety signals through a stable interface, an enforcement layer for runtime risk policy, and a governance MAS for auditing, verification, and versioned refinement of the Oracle. The central claim is patch locality: safety failures can be mitigated by updating only the governed Oracle artifact and release pipeline rather than retracting or retraining the underlying decision component. The architecture is presented as implementation-agnostic with respect to both Proposer and Oracle, specifying roles, artifacts, protocols, and release semantics for runtime gating, audit intake, signed patching, and staged rollout.
Significance. If the architecture can be realized with the claimed isolation and stability properties, it would provide a practical engineering framework for integrating capable but fallible autonomous systems under explicit, version-controlled oversight in multi-agent settings. The emphasis on modular patching and governance MAS supervision addresses a real deployment challenge in safety-critical AI systems. However, the contribution remains conceptual; without empirical validation, formal protocol analysis, or concrete interface specifications, its significance is limited to outlining a design pattern rather than demonstrating a working solution.
major comments (2)
- [Abstract and governance MAS description] Abstract and governance MAS section: The central engineering principle of patch locality is asserted to hold because governance actions on the Oracle remain isolated from the Proposer, yet no protocol analysis, interface schema for raw safety signals, or examination of potential new runtime dependencies is supplied. For opaque or learned Proposers this leaves the claim that updates can be performed without re-entanglement unshown.
- [Safety Oracle interface definition] Safety Oracle and enforcement layer: The paper states that a stable, implementation-agnostic interface exists allowing any Proposer to emit trajectories and receive usable raw safety signals, but supplies neither a concrete signal schema nor an argument that the interface definition itself does not force coupling when the Proposer is a black-box learned model.
minor comments (2)
- [Related work] The manuscript would benefit from an explicit comparison table contrasting the proposed architecture with existing MAS governance frameworks (e.g., normative MAS or runtime verification systems) to clarify novelty.
- [Terminology and definitions] Terminology such as 'raw safety signals' and 'versioned refinement' is used without operational definitions or examples of what the signals contain or how refinement is performed.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive critique. The comments correctly identify that the manuscript presents the Alignment Flywheel at an architectural level without supplying concrete protocol details or an example interface schema. We address each point below and will incorporate the requested clarifications in the revised version.
read point-by-point responses
-
Referee: [Abstract and governance MAS description] Abstract and governance MAS section: The central engineering principle of patch locality is asserted to hold because governance actions on the Oracle remain isolated from the Proposer, yet no protocol analysis, interface schema for raw safety signals, or examination of potential new runtime dependencies is supplied. For opaque or learned Proposers this leaves the claim that updates can be performed without re-entanglement unshown.
Authors: We agree that the current text asserts patch locality without a supporting protocol sketch. In the revision we will add a new subsection (Section 4.2) that defines the minimal interaction protocol: the Proposer emits only observable trajectories (state-action sequences) and receives a vector of raw safety signals; the Oracle update changes only the evaluation function behind those signals. Because the Proposer never receives Oracle internals or training data, and because enforcement is performed by a separate runtime gate that consumes the signals, an Oracle patch cannot create new runtime dependencies on the Proposer. We will also include a short argument that this contract remains stable even when the Proposer is a black-box learned model, since the interface touches only externally observable behavior. revision: yes
-
Referee: [Safety Oracle interface definition] Safety Oracle and enforcement layer: The paper states that a stable, implementation-agnostic interface exists allowing any Proposer to emit trajectories and receive usable raw safety signals, but supplies neither a concrete signal schema nor an argument that the interface definition itself does not force coupling when the Proposer is a black-box learned model.
Authors: The manuscript deliberately avoids prescribing a single schema in order to remain agnostic across safety-evaluation techniques. To meet the referee’s request we will append an illustrative minimal schema (Appendix A) that lists the required fields (trajectory identifier, per-step risk vector, binary violation flags, and optional uncertainty estimate). The accompanying text will argue that this schema induces no coupling: the Proposer is required only to emit trajectories it already produces and to accept the returned signals for gating; it does not expose parameters or gradients to the Oracle, nor does the Oracle modify the Proposer’s weights. Hence an update to the Oracle artifact changes only the signal-generation logic, preserving the claimed locality. revision: yes
Circularity Check
No circularity: descriptive architecture with no derivations or self-referential reductions
full rationale
The paper is a descriptive architectural specification that defines roles (Proposer, Safety Oracle, governance MAS) and states the patch locality principle as an engineering claim. No equations, fitted parameters, predictions, or formal derivations appear in the text. The central decoupling is asserted via interface stability rather than derived from prior quantities within the paper. No self-citations are invoked as load-bearing uniqueness theorems or ansatzes. The architecture is presented as implementation-agnostic by construction of the role definitions, but this is definitional description rather than a circular reduction of a claimed result to its inputs. The skeptic's concerns address unproven assumptions about interface independence, which fall under correctness or completeness rather than circularity.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption A stable interface for raw safety signals can be maintained independently of the decision component.
- domain assumption The governance MAS can effectively audit, verify uncertainty, and refine the Oracle through versioned updates.
invented entities (2)
-
Safety Oracle
no independent evidence
-
Alignment Flywheel
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
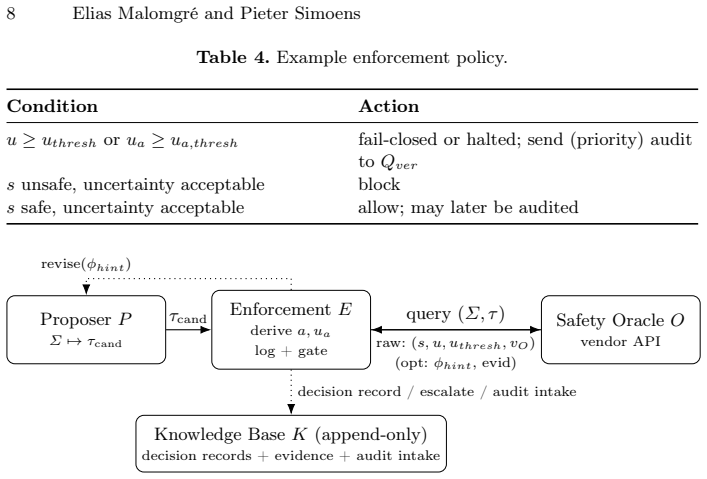
A Proposer generates candidate trajectories; a governed Safety Oracle stack returns safety scores, prediction uncertainty, audit coverage uncertainty, and evidence hooks through a stable interface; and an Enforcement layer applies explicit risk policy at runtime.
-
IndisputableMonolith/Foundation/BranchSelection.leanbranch_selection unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The central engineering principle is patch locality: many newly observed safety failures can be mitigated by updating the governed oracle artifact and its release pipeline rather than retracting or retraining the underlying decision component.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
In: Proceedings of the Twenty-First International Conference on Machine Learning
Abbeel, P., Ng, A.Y.: Apprenticeship learning via inverse reinforcement learning. In: Proceedings of the Twenty-First International Conference on Machine Learning. p. 1. ICML ’04, Association for Computing Machin- ery, New York, NY, USA (2004). https://doi.org/10.1145/1015330.1015430, https://doi.org/10.1145/1015330.1015430
-
[2]
Artificial Intelligence Review55(6), 4307–4346 (2022)
Adams, S., Cody, T., Beling, P.A.: A survey of inverse reinforcement learn- ing. Artificial Intelligence Review55(6), 4307–4346 (2022)
work page 2022
-
[3]
In: Proceedings of the AAAI conference on artificial intelligence
Alshiekh, M., Bloem, R., Ehlers, R., Könighofer, B., Niekum, S., Topcu, U.: Safe reinforcement learning via shielding. In: Proceedings of the AAAI conference on artificial intelligence. vol. 32 (2018)
work page 2018
-
[4]
Artificial Intelligence297, 103500 (2021)
Arora, S., Doshi, P.: A survey of inverse reinforcement learning: Challenges, methods and progress. Artificial Intelligence297, 103500 (2021)
work page 2021
-
[5]
arXiv preprint arXiv:2412.10096 (2024)
Baert, M., Leroux, S., Simoens, P.: Reward machine inference for robotic manipulation. arXiv preprint arXiv:2412.10096 (2024)
-
[6]
In: 2014 IEEE Real-Time Systems Symposium
Bak, S., Johnson, T.T., Caccamo, M., Sha, L.: Real-time reachability for verified simplex design. In: 2014 IEEE Real-Time Systems Symposium. pp. 138–148. IEEE (2014)
work page 2014
-
[7]
AI and Ethics5(3), 3265–3279 (2025)
Batool, A., Zowghi, D., Bano, M.: Ai governance: a systematic literature review. AI and Ethics5(3), 3265–3279 (2025)
work page 2025
-
[8]
Internet Research33(7), 133– 167 (2023)
Birkstedt, T., Minkkinen, M., Tandon, A., Mäntymäki, M.: Ai governance: themes, knowledge gaps and future agendas. Internet Research33(7), 133– 167 (2023)
work page 2023
-
[9]
Computational & Mathematical Organization Theory 12(2), 71–79 (2006)
Boella, G., Van Der Torre, L., Verhagen, H.: Introduction to normative multiagent systems. Computational & Mathematical Organization Theory 12(2), 71–79 (2006)
work page 2006
-
[10]
In: 2017 IEEE international conference on big data (big data)
Breck, E., Cai, S., Nielsen, E., Salib, M., Sculley, D.: The ml test score: A rubric for ml production readiness and technical debt reduction. In: 2017 IEEE international conference on big data (big data). pp. 1123–1132. IEEE (2017)
work page 2017
-
[11]
In: Proceedings of the 10th international command and control research technology symposium
Brehmer, B.: The dynamic ooda loop: Amalgamating boyd’s ooda loop and the cybernetic approach to command and control. In: Proceedings of the 10th international command and control research technology symposium. pp. 365–368 (2005)
work page 2005
-
[12]
arXiv preprint arXiv:2510.14176 (2025)
Castanyer, R.C., Mohamed, F., Castro, P.S., Neary, C., Berseth, G.: Arm- fm: Automated reward machines via foundation models for compositional reinforcement learning. arXiv preprint arXiv:2510.14176 (2025)
-
[13]
ACM Computing Surveys58(2), 1–37 (2025)
Chaudhari, S., Aggarwal, P., Murahari, V., Rajpurohit, T., Kalyan, A., Narasimhan, K., Deshpande, A., Castro da Silva, B.: Rlhf deciphered: A critical analysis of reinforcement learning from human feedback for llms. ACM Computing Surveys58(2), 1–37 (2025)
work page 2025
-
[14]
IEEE Control Systems Magazine 43(2), 28–65 (2023)
Hobbs, K.L., Mote, M.L., Abate, M.C., Coogan, S.D., Feron, E.M.: Run- time assurance for safety-critical systems: An introduction to safety filtering 48 Elias Malomgré and Pieter Simoens approaches for complex control systems. IEEE Control Systems Magazine 43(2), 28–65 (2023)
work page 2023
-
[15]
In: Proceedings of the SIGCHI conference on Human Factors in Computing Systems
Horvitz, E.: Principles of mixed-initiative user interfaces. In: Proceedings of the SIGCHI conference on Human Factors in Computing Systems. pp. 159–166 (1999)
work page 1999
-
[16]
Hovakimyan, G., Bravo, J.M.: Evolving strategies in machine learning: a systematicreviewofconceptdriftdetection.Information15(12), 786(2024)
work page 2024
-
[17]
Hsu, K.C., Hu, H., Fisac, J.F.: The safety filter: A unified view of safety- criticalcontrolinautonomoussystems.AnnualReviewofControl,Robotics, and Autonomous Systems7(2023)
work page 2023
-
[18]
arXiv preprint arXiv:2310.19852 (2025)
Ji, J., Qiu, T., Chen, B., Zhang, B., Lou, H., Wang, K., Duan, Y., He, Z., Zhou, J., Zhang, Z., et al.: Ai alignment: A comprehensive survey. arXiv preprint arXiv:2310.19852 (2025)
-
[19]
Communications of the ACM68(11), 80–90 (2025)
Könighofer, B., Bloem, R., Jansen, N., Junges, S., Pranger, S.: Shields for safe reinforcement learning. Communications of the ACM68(11), 80–90 (2025)
work page 2025
-
[20]
In: 2017 USENIX Annual Technical Conference (USENIX ATC 17)
Kuppusamy, T.K., Diaz, V., Cappos, J.: Mercury:{Bandwidth-Effective} prevention of rollback attacks against community repositories. In: 2017 USENIX Annual Technical Conference (USENIX ATC 17). pp. 673–688 (2017)
work page 2017
-
[21]
Li, J., Zhao, B., Zhang, C.: Fuzzing: a survey. Cybersecurity1(1), 6 (2018)
work page 2018
-
[22]
In: Findings of the Association for Computational Linguistics: EMNLP 2024
Li, R., Wang, P., Ma, J., Zhang, D., Sha, L., Sui, Z.: Be a multitude to itself: A prompt evolution framework for red teaming. In: Findings of the Association for Computational Linguistics: EMNLP 2024. pp. 3287–3301 (2024)
work page 2024
-
[23]
arXiv preprint arXiv:2409.07569 (2024)
Liu, G., Xu, S., Liu, S., Gaurav, A., Subramanian, S.G., Poupart, P.: A comprehensive survey on inverse constrained reinforcement learning: Defi- nitions, progress and challenges. arXiv preprint arXiv:2409.07569 (2024)
-
[24]
arXiv preprint arXiv:2507.15287 (2025)
Malomgré, E., Simoens, P.: Mixture of autoencoder experts guidance using unlabeled and incomplete data for exploration in reinforcement learning. arXiv preprint arXiv:2507.15287 (2025)
- [25]
-
[26]
AI and Ethics2(4), 603–609 (2022)
Mäntymäki, M., Minkkinen, M., Birkstedt, T., Viljanen, M.: Defining orga- nizational ai governance. AI and Ethics2(4), 603–609 (2022)
work page 2022
-
[27]
In: Proceedings of the 2022 ACM SIGSAC Conference on Com- puter and Communications Security
Newman, Z., Meyers, J.S., Torres-Arias, S.: Sigstore: Software signing for everybody. In: Proceedings of the 2022 ACM SIGSAC Conference on Com- puter and Communications Security. pp. 2353–2367 (2022)
work page 2022
- [28]
-
[29]
Advances in neural information processing systems35, 27730–27744 (2022) The Alignment Flywheel 49
Ouyang, L., Wu, J., Jiang, X., Almeida, D., Wainwright, C., Mishkin, P., Zhang, C., Agarwal, S., Slama, K., Ray, A., et al.: Training language models to follow instructions with human feedback. Advances in neural information processing systems35, 27730–27744 (2022) The Alignment Flywheel 49
work page 2022
-
[30]
Advances in neural information processing systems32(2019)
Ovadia, Y., Fertig, E., Ren, J., Nado, Z., Sculley, D., Nowozin, S., Dillon, J., Lakshminarayanan, B., Snoek, J.: Can you trust your model’s uncertainty? evaluating predictive uncertainty under dataset shift. Advances in neural information processing systems32(2019)
work page 2019
-
[31]
In: 2017 17th International Conference on Appli- cation of Concurrency to System Design (ACSD)
Phan, D., Yang, J., Clark, M., Grosu, R., Schierman, J., Smolka, S., Stoller, S.: A component-based simplex architecture for high-assurance cyber-physical systems. In: 2017 17th International Conference on Appli- cation of Concurrency to System Design (ACSD). pp. 49–58. IEEE (2017)
work page 2017
-
[32]
Qin, X., Luan, S., See, J., Yang, C., Li, Z.: Governed capability evolution for embodied agents: Safe upgrade, compatibility checking, and runtime rollback for embodied capability modules. arXiv preprint arXiv:2604.08059 (2026)
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[33]
Quiñonero-Candela, J., Sugiyama, M., Schwaighofer, A., Lawrence, N.D.: Dataset shift in machine learning. Mit Press (2008)
work page 2008
-
[34]
Advances in neural information processing systems36, 53728–53741 (2023)
Rafailov, R., Sharma, A., Mitchell, E., Manning, C.D., Ermon, S., Finn, C.: Direct preference optimization: Your language model is secretly a reward model. Advances in neural information processing systems36, 53728–53741 (2023)
work page 2023
-
[35]
In: Proceedings of the 2022 AAAI/ACM Conference on AI, Ethics, and Society
Raji, I.D., Xu, P., Honigsberg, C., Ho, D.: Outsider oversight: Designing a third party audit ecosystem for ai governance. In: Proceedings of the 2022 AAAI/ACM Conference on AI, Ethics, and Society. pp. 557–571 (2022)
work page 2022
-
[36]
Rebedea, T., Dinu, R., Sreedhar, M.N., Parisien, C., Cohen, J.: Nemo guardrails: A toolkit for controllable and safe llm applications with pro- grammable rails. In: Proceedings of the 2023 conference on empirical meth- ods in natural language processing: system demonstrations. pp. 431–445 (2023)
work page 2023
-
[37]
In: Proceedings of the fifth international confer- ence on Autonomous agents
Scerri, P., Pynadath, D., Tambe, M.: Adjustable autonomy in real-world multi-agent environments. In: Proceedings of the fifth international confer- ence on Autonomous agents. pp. 300–307 (2001)
work page 2001
-
[38]
Advances in neural information process- ing systems28(2015)
Sculley, D., Holt, G., Golovin, D., Davydov, E., Phillips, T., Ebner, D., Chaudhary, V., Young, M., Crespo, J.F., Dennison, D.: Hidden technical debt in machine learning systems. Advances in neural information process- ing systems28(2015)
work page 2015
-
[39]
IEEE access5, 3909–3943 (2017)
Shahin, M., Babar, M.A., Zhu, L.: Continuous integration, delivery and deployment: a systematic review on approaches, tools, challenges and prac- tices. IEEE access5, 3909–3943 (2017)
work page 2017
-
[40]
arXiv preprint arXiv:2108.13557 (2021)
Shankar, S., Parameswaran, A.: Towards observability for production ma- chine learning pipelines. arXiv preprint arXiv:2108.13557 (2021)
-
[41]
Active Reward Machine Inference From Raw State Trajectories
Shehab, M.L., Aspeel, A., Ozay, N.: Active reward machine inference from raw state trajectories. arXiv preprint arXiv:2604.07480 (2026)
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[42]
ACM Transactions on Intelligent Systems and Technology (TIST)5(1), 1–23 (2014)
Singh, M.P.: Norms as a basis for governing sociotechnical systems. ACM Transactions on Intelligent Systems and Technology (TIST)5(1), 1–23 (2014)
work page 2014
-
[43]
arXiv preprint arXiv:2507.13158 (2025) 50 Elias Malomgré and Pieter Simoens
Sun, H., van der Schaar, M.: Inverse reinforcement learning meets large language model post-training: Basics, advances, and opportunities. arXiv preprint arXiv:2507.13158 (2025) 50 Elias Malomgré and Pieter Simoens
-
[44]
arXiv preprint arXiv:2505.09843 (2025)
Turcotte, M., Labrèche, F., Paquette, S.O.: Automated alert classification and triage (aact): an intelligent system for the prioritisation of cybersecurity alerts. arXiv preprint arXiv:2505.09843 (2025)
-
[45]
Information and Software Technology183, 107733 (2025)
Zarour, M., Alzabut, H., Al-Sarayreh, K.T.: Mlops best prac- tices, challenges and maturity models: A systematic litera- ture review. Information and Software Technology183, 107733 (2025). https://doi.org/https://doi.org/10.1016/j.infsof.2025.107733, https://www.sciencedirect.com/science/article/pii/S0950584925000722
-
[46]
arXiv preprint arXiv:2511.08607 (2025)
Zhao, Y., Zhang, S., Wu, Y., Sun, Y., Sun, Y., Pei, D., Bansal, C., Ma, M.: Triage in software engineering: A systematic review of research and practice. arXiv preprint arXiv:2511.08607 (2025)
- [47]
-
[48]
Fine-Tuning Language Models from Human Preferences
Ziegler, D.M., Stiennon, N., Wu, J., Brown, T.B., Radford, A., Amodei, D., Christiano, P., Irving, G.: Fine-tuning language models from human preferences. arXiv preprint arXiv:1909.08593 (2019)
work page internal anchor Pith review Pith/arXiv arXiv 1909
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.