Recognition: 2 theorem links
· Lean TheoremPTLD: Sim-to-real Privileged Tactile Latent Distillation for Dexterous Manipulation
Pith reviewed 2026-05-15 16:32 UTC · model grok-4.3
The pith
PTLD distills real-world privileged tactile data into a state estimator that improves sim-trained proprioceptive policies for dexterous manipulation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
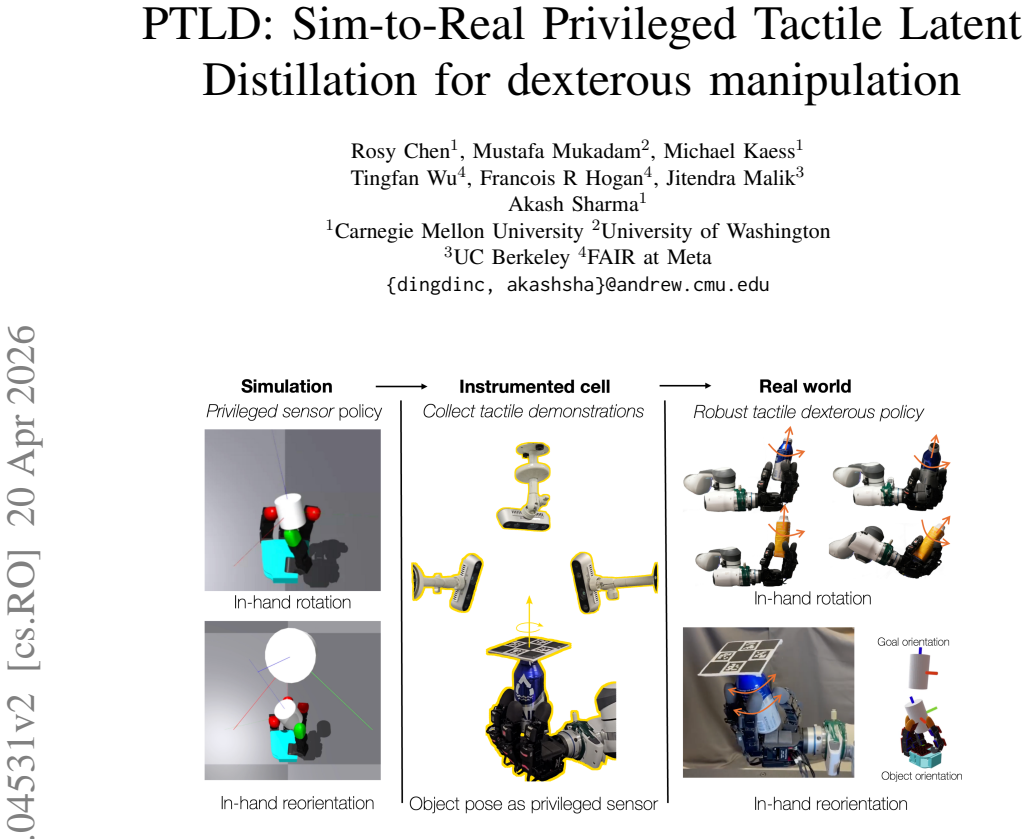
PTLD collects real-world tactile policy data with privileged sensors and distills it into a latent state estimator that operates on tactile input, enabling proprioceptive policies trained in simulation to incorporate tactile sensing and achieve large gains on in-hand rotation and reorientation without tactile simulation.
What carries the argument
Privileged Tactile Latent Distillation, a process that trains a state estimator on real privileged tactile observations to augment sim-trained proprioceptive policies.
If this is right
- Proprioceptive policies trained in simulation gain substantial performance from the distilled tactile estimator on benchmark manipulation tasks.
- Tasks previously intractable with proprioception alone, such as tactile in-hand reorientation, become achievable.
- The approach reduces dependence on accurate tactile simulation or costly real-world demonstration collection.
- Final policies run with only proprioception and the learned estimator, avoiding the need for privileged sensors at test time.
Where Pith is reading between the lines
- The distillation technique could extend to other hard-to-simulate modalities like vision or force without changing the overall training pipeline.
- Applying the same privileged-to-latent transfer to multi-fingered hands with different sensor placements might generalize the gains beyond the tested setup.
- If the estimator remains stable across object variations, it could support longer-horizon household tasks that combine rotation and reorientation.
Load-bearing premise
Real-world data collected with privileged sensors can be distilled into a robust tactile state estimator that transfers effectively to improve policies trained only on proprioception in simulation.
What would settle it
Running the distilled estimator on a new task or robot hardware and finding zero or negative performance gain relative to the proprioception-only baseline.
Figures










read the original abstract
Tactile dexterous manipulation is essential to automating complex household tasks, yet learning effective control policies remains a challenge. While recent work has relied on imitation learning, obtaining high quality demonstrations for multi-fingered hands via robot teleoperation or kinesthetic teaching is prohibitive. Alternatively, with reinforcement we can learn skills in simulation, but fast and realistic simulation of tactile observations is challenging. To bridge this gap, we introduce PTLD: sim-to-real Privileged Tactile Latent Distillation, a novel approach to learning tactile manipulation skills without requiring tactile simulation. Instead of simulating tactile sensors or relying purely on proprioceptive policies to transfer zero-shot sim-to-real, our key idea is to leverage privileged sensors in the real world to collect real-world tactile policy data. This data is then used to distill a robust state estimator that operates on tactile input. We demonstrate from our experiments that PTLD can be used to improve proprioceptive manipulation policies trained in simulation significantly by incorporating tactile sensing. On the benchmark in-hand rotation task, PTLD achieves a 182% improvement over a proprioception only policy. We also show that PTLD enables learning the challenging task of tactile in-hand reorientation where we see a 57% improvement in the number of goals reached over using proprioception alone. Website: https://akashsharma02.github.io/ptld-website/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces PTLD, a sim-to-real method for dexterous manipulation that collects real-world data using privileged tactile sensors, distills a tactile state estimator from this data, and uses the resulting latents to augment proprioceptive policies trained entirely in simulation. It reports quantitative gains of 182% on a benchmark in-hand rotation task and 57% on tactile in-hand reorientation relative to proprioception-only baselines, without requiring tactile simulation.
Significance. If the transfer results hold under rigorous controls, the approach would offer a practical route to incorporating real tactile sensing into sim-trained policies for multi-fingered hands, addressing a key bottleneck in dexterous manipulation where accurate tactile simulation remains difficult.
major comments (2)
- [Experimental Results] Experimental Results section: the reported 182% and 57% improvements are given as point estimates with no accompanying details on number of evaluation trials, standard deviations, confidence intervals, or statistical tests; without these, it is impossible to determine whether the gains are reliable or could be explained by variance in policy rollouts.
- [Method] Method section (distillation procedure): the central claim that real privileged tactile observations can be distilled into latents that improve a policy whose training distribution contains only simulated proprioception lacks any analysis or ablation addressing the domain gap; no alignment mechanism, distribution matching, or real-world deployment results with the estimator are provided to support that the latents remain useful when the policy is executed outside simulation.
minor comments (2)
- [Abstract] Abstract: the phrase '182% improvement' should be defined explicitly (e.g., relative success rate, normalized return) to avoid ambiguity.
- [Related Work] Related Work: add citations to recent privileged-information distillation and sim-to-real tactile papers to better situate the contribution.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed review. The comments highlight important aspects of statistical rigor and domain-gap analysis that will strengthen the manuscript. We address each major comment below and outline the planned revisions.
read point-by-point responses
-
Referee: [Experimental Results] Experimental Results section: the reported 182% and 57% improvements are given as point estimates with no accompanying details on number of evaluation trials, standard deviations, confidence intervals, or statistical tests; without these, it is impossible to determine whether the gains are reliable or could be explained by variance in policy rollouts.
Authors: We agree that the current presentation of results as point estimates is insufficient. In the revised manuscript we will report the exact number of evaluation trials (30 independent rollouts per policy variant), standard deviations, 95% confidence intervals, and the results of paired t-tests confirming statistical significance of the reported improvements. revision: yes
-
Referee: [Method] Method section (distillation procedure): the central claim that real privileged tactile observations can be distilled into latents that improve a policy whose training distribution contains only simulated proprioception lacks any analysis or ablation addressing the domain gap; no alignment mechanism, distribution matching, or real-world deployment results with the estimator are provided to support that the latents remain useful when the policy is executed outside simulation.
Authors: The quantitative gains (182% and 57%) are measured in real-world robot deployments, where the sim-trained proprioceptive policy receives latents produced by an estimator that was trained exclusively on real privileged tactile data. Because the estimator never sees simulated tactile signals, the domain gap is addressed by construction. Nevertheless, we acknowledge that an explicit analysis would improve clarity. In revision we will add (i) an ablation isolating the contribution of the tactile latents, (ii) t-SNE visualizations of latent distributions on held-out real data, and (iii) quantitative estimator accuracy metrics from the same real-world trials. We maintain that an explicit alignment loss is unnecessary given the end-to-end real-world validation. revision: partial
Circularity Check
No significant circularity; empirical comparisons stand independently of any derivation chain.
full rationale
The paper introduces PTLD as an empirical distillation procedure that collects privileged real-world tactile data to train a state estimator, then uses the resulting latents to augment a proprioception-only policy trained in simulation. No equations, derivations, or self-referential definitions appear in the method; performance numbers (182% and 57% improvements) are reported as direct experimental outcomes against proprioception baselines. No fitted parameters are renamed as predictions, no uniqueness theorems are imported from self-citations, and no ansatz is smuggled via prior work. The central claims rest on task success rates measured in the target setting, which are externally falsifiable and do not reduce to the inputs by construction.
Axiom & Free-Parameter Ledger
invented entities (1)
-
Privileged Tactile Latent
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We employ an asymmetric actor-critic framework... Llatent ≜ ||E(Xsensor) − sg(Ê(Xpriv))|| ... LPPO ≜ LCLIPπ + cV LV + Lentropy ... L ≜ LPPO + clatent Llatent
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
PTLD: sim-to-real Privileged Tactile Latent Distillation... distill a robust state estimator that operates on tactile input
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Diffusion Policy: Visuomotor Policy Learning via Action Diffusion,
C. Chi, S. Feng, Y . Du, Z. Xu, E. Cousineau, B. Burchfiel, and S. Song, “Diffusion Policy: Visuomotor Policy Learning via Action Diffusion,” inProceedings of Robotics: Science and Systems (RSS),
-
[2]
Available: https://journals.sagepub.com/doi/abs/10.1177/ 02783649241273668?journalCode=ijra
[Online]. Available: https://journals.sagepub.com/doi/abs/10.1177/ 02783649241273668?journalCode=ijra
-
[3]
Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn, “Learning fine- grained bimanual manipulation with low-cost hardware,”arXiv preprint arXiv:2304.13705, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[4]
Universal Manipulation Interface: In-The-Wild Robot Teaching Without In-The-Wild Robots
C. Chi, Z. Xu, C. Pan, E. Cousineau, B. Burchfiel, S. Feng, R. Tedrake, and S. Song, “Universal manipulation interface: In-the-wild robot teaching without in-the-wild robots,”arXiv preprint arXiv:2402.10329, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[5]
C. Chen, Z. Yu, H. Choi, M. Cutkosky, and J. Bohg, “Dexforce: Extracting force-informed actions from kinesthetic demonstrations for dexterous manipulation,”IEEE Robotics and Automation Letters, vol. 10, no. 6, pp. 6416–6423, 2025
work page 2025
-
[6]
Dexumi: Using human hand as the universal manipulation interface for dexterous manipulation,
M. Xu, H. Zhang, Y . Hou, Z. Xu, L. Fan, M. Veloso, and S. Song, “Dexumi: Using human hand as the universal manipulation interface for dexterous manipulation,”arXiv preprint arXiv:2505.21864, 2025
-
[7]
Sim-to-Real: Learning Agile Locomotion For Quadruped Robots
J. Tan, T. Zhang, E. Coumans, A. Iscen, Y . Bai, D. Hafner, S. Bohez, and V . Vanhoucke, “Sim-to-real: Learning agile locomotion for quadruped robots,”arXiv preprint arXiv:1804.10332, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[8]
Deepmimic: Example-guided deep reinforcement learning of physics-based character skills,
X. B. Peng, P. Abbeel, S. Levine, and M. Van de Panne, “Deepmimic: Example-guided deep reinforcement learning of physics-based character skills,”ACM Transactions On Graphics (TOG), vol. 37, no. 4, pp. 1–14, 2018
work page 2018
-
[9]
Hover: Versatile neural whole-body controller for humanoid robots,
T. He, W. Xiao, T. Lin, Z. Luo, Z. Xu, Z. Jiang, J. Kautz, C. Liu, G. Shi, X. Wanget al., “Hover: Versatile neural whole-body controller for humanoid robots,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 9989–9996
work page 2025
-
[10]
Y . Li, Z. Luo, T. Zhang, C. Dai, A. Kanervisto, A. Tirinzoni, H. Weng, K. Kitani, M. Guzek, A. Touatiet al., “Bfm-zero: A promptable behavioral foundation model for humanoid control using unsupervised reinforcement learning,”arXiv preprint arXiv:2511.04131, 2025
-
[11]
K. Zakka, B. Tabanpour, Q. Liao, M. Haiderbhai, S. Holt, J. Y . Luo, A. Allshire, E. Frey, K. Sreenath, L. A. Kahrset al., “Mujoco playground,” arXiv preprint arXiv:2502.08844, 2025
-
[12]
In-Hand Object Rotation via Rapid Motor Adaptation,
H. Qi, A. Kumar, R. Calandra, Y . Ma, and J. Malik, “In-Hand Object Rotation via Rapid Motor Adaptation,” inConference on Robot Learning (CoRL), 2022
work page 2022
-
[13]
Dextrous tactile in-hand manipulation using a modular reinforcement learning architecture,
J. Pitz, L. Röstel, L. Sievers, and B. Bäuml, “Dextrous tactile in-hand manipulation using a modular reinforcement learning architecture,”arXiv preprint arXiv:2303.04705, 2023
-
[14]
Dextreme: Transfer of agile in-hand manipulation from simulation to reality,
A. Handa, A. Allshire, V . Makoviychuk, A. Petrenko, R. Singh, J. Liu, D. Makoviichuk, K. Van Wyk, A. Zhurkevich, B. Sundaralingamet al., “Dextreme: Transfer of agile in-hand manipulation from simulation to reality,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 5977–5984
work page 2023
-
[15]
Dextrah- rgb: Visuomotor policies to grasp anything with dexterous hands,
R. Singh, A. Allshire, A. Handa, N. Ratliff, and K. Van Wyk, “Dextrah- rgb: Visuomotor policies to grasp anything with dexterous hands,”arXiv preprint arXiv:2412.01791, 2024
-
[16]
Solving Rubik's Cube with a Robot Hand
I. Akkaya, M. Andrychowicz, M. Chociej, M. Litwin, B. McGrew, A. Petron, A. Paino, M. Plappert, G. Powell, R. Ribaset al., “Solving rubik’s cube with a robot hand,”arXiv preprint arXiv:1910.07113, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1910
-
[17]
Learning dexterous in-hand manipulation,
O. M. Andrychowicz, B. Baker, M. Chociej, R. Jozefowicz, B. McGrew, J. Pachocki, A. Petron, M. Plappert, G. Powell, A. Rayet al., “Learning dexterous in-hand manipulation,”The International Journal of Robotics Research, vol. 39, no. 1, pp. 3–20, 2020
work page 2020
-
[18]
Tactile beyond pixels: Multisensory touch representations for robot manipulation,
C. Higuera, A. Sharma, T. Fan, C. K. Bodduluri, B. Boots, M. Kaess, M. Lambeta, T. Wu, Z. Liu, F. R. Hogan, and M. Mukadam, “Tactile beyond pixels: Multisensory touch representations for robot manipulation,” in9th Annual Conference on Robot Learning, 2025. [Online]. Available: https://openreview.net/forum?id=sMs4pJYhWi
work page 2025
-
[19]
Anyrotate: Gravity-invariant in-hand object rotation with sim-to-real touch,
M. Yang, C. Lu, A. Church, Y . Lin, C. Ford, H. Li, E. Psomopoulou, D. A. Barton, and N. F. Lepora, “Anyrotate: Gravity-invariant in-hand object rotation with sim-to-real touch,”arXiv preprint arXiv:2405.07391, 2024
-
[20]
Dexteritygen: Foundation controller for unprecedented dexterity,
Z.-H. Yin, C. Wang, L. Pineda, F. Hogan, K. Bodduluri, A. Sharma, P. Lancaster, I. Prasad, M. Kalakrishnan, J. Maliket al., “Dexteritygen: Foundation controller for unprecedented dexterity,”arXiv preprint arXiv:2502.04307, 2025
-
[21]
Rotating without seeing: Towards in-hand dexterity through touch,
Z.-H. Yin, B. Huang, Y . Qin, Q. Chen, and X. Wang, “Rotating without seeing: Towards in-hand dexterity through touch,”arXiv preprint arXiv:2303.10880, 2023
-
[22]
Tacto: A fast, flexible, and open-source simulator for high-resolution vision-based tactile sensors,
S. Wang, M. Lambeta, P.-W. Chou, and R. Calandra, “Tacto: A fast, flexible, and open-source simulator for high-resolution vision-based tactile sensors,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 3930– 3937, 2022
work page 2022
-
[23]
Tacsl: A library for visuotactile sensor simulation and learning,
I. Akinola, J. Xu, J. Carius, D. Fox, and Y . Narang, “Tacsl: A library for visuotactile sensor simulation and learning,”IEEE Transactions on Robotics, 2025
work page 2025
-
[24]
Sim2real manipulation on unknown objects with tactile-based reinforce- ment learning,
E. Su, C. Jia, Y . Qin, W. Zhou, A. Macaluso, B. Huang, and X. Wang, “Sim2real manipulation on unknown objects with tactile-based reinforce- ment learning,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 9234–9241
work page 2024
-
[25]
D. Chen, B. Zhou, V . Koltun, and P. Krähenbühl, “Learning by cheating,” inConference on robot learning. PMLR, 2020, pp. 66–75
work page 2020
-
[26]
Data-driven planning via imitation learning,
S. Choudhury, M. Bhardwaj, S. Arora, A. Kapoor, G. Ranade, S. Scherer, and D. Dey, “Data-driven planning via imitation learning,”The Interna- tional Journal of Robotics Research, vol. 37, no. 13-14, pp. 1632–1672, 2018
work page 2018
-
[27]
Rma: Rapid motor adaptation for legged robots
A. Kumar, Z. Fu, D. Pathak, and J. Malik, “Rma: Rapid motor adaptation for legged robots,”arXiv preprint arXiv:2107.04034, 2021
-
[28]
An overview of dexterous manipulation,
A. M. Okamura, N. Smaby, and M. R. Cutkosky, “An overview of dexterous manipulation,” inProceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), vol. 1. IEEE, 2000, pp. 255–262
work page 2000
-
[29]
In-hand dexterous manipulation of piecewise-smooth 3-d objects,
D. Rus, “In-hand dexterous manipulation of piecewise-smooth 3-d objects,”The International Journal of Robotics Research, vol. 18, no. 4, pp. 355–381, 1999
work page 1999
-
[30]
Deep dynamics models for learning dexterous manipulation,
A. Nagabandi, K. Konolige, S. Levine, and V . Kumar, “Deep dynamics models for learning dexterous manipulation,” inConference on robot learning. PMLR, 2020, pp. 1101–1112
work page 2020
-
[31]
Dextrous manipulation by rolling and finger gaiting,
L. Han and J. C. Trinkle, “Dextrous manipulation by rolling and finger gaiting,” inProceedings. 1998 IEEE International Conference on Robotics and Automation (Cat. No. 98CH36146), vol. 1. IEEE, 1998, pp. 730– 735
work page 1998
-
[32]
Implementing a force strategy for object re-orientation,
R. Fearing, “Implementing a force strategy for object re-orientation,” inProceedings. 1986 IEEE International Conference on Robotics and Automation, vol. 3. IEEE, 1986, pp. 96–102
work page 1986
-
[33]
Complex in-hand manipulation via compliance-enabled finger gaiting and multi- modal planning,
A. S. Morgan, K. Hang, B. Wen, K. Bekris, and A. M. Dollar, “Complex in-hand manipulation via compliance-enabled finger gaiting and multi- modal planning,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 4821–4828, 2022
work page 2022
-
[34]
Visual dexterity: In-hand reorientation of novel and complex object shapes,
T. Chen, M. Tippur, S. Wu, V . Kumar, E. Adelson, and P. Agrawal, “Visual dexterity: In-hand reorientation of novel and complex object shapes,”Science Robotics, vol. 8, no. 84, p. eadc9244, 2023
work page 2023
-
[35]
Domain randomization for transferring deep neural networks from simulation to the real world,
J. Tobin, R. Fong, A. Ray, J. Schneider, W. Zaremba, and P. Abbeel, “Domain randomization for transferring deep neural networks from simulation to the real world,” in2017 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2017, pp. 23–30
work page 2017
-
[36]
Robot parkour learning.arXiv preprint arXiv:2309.05665, 2023
Z. Zhuang, Z. Fu, J. Wang, C. Atkeson, S. Schwertfeger, C. Finn, and H. Zhao, “Robot parkour learning,”arXiv preprint arXiv:2309.05665, 2023
-
[37]
Learning perception-aware agile flight in cluttered environments,
Y . Song, K. Shi, R. Penicka, and D. Scaramuzza, “Learning perception-aware agile flight in cluttered environments,”arXiv preprint arXiv:2210.01841, 2022
-
[38]
GelSight: High-resolution Robot Tactile Sensors for Estimating Geometry and Force,
W. Yuan, S. Dong, and E. Adelson, “GelSight: High-resolution Robot Tactile Sensors for Estimating Geometry and Force,”Sensors: Special Issue on Tactile Sensors and Sensing, vol. 17, no. 12, pp. 2762 – 2782, November 2017. [Online]. Available: https: //www.mdpi.com/1424-8220/17/12/2762
work page 2017
-
[39]
M. Lambeta, P.-W. Chou, S. Tian, B. Yang, B. Maloon, V . R. Most, D. Stroud, R. Santos, A. Byagowi, G. Kammerer, D. Jayaraman, and R. Calandra, “DIGIT: A Novel Design for a Low-Cost Compact High- Resolution Tactile Sensor With Application to In-Hand Manipulation,” IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 3838–3845,
-
[40]
Available: https://ieeexplore.ieee.org/document/9018215
[Online]. Available: https://ieeexplore.ieee.org/document/9018215
-
[41]
Reskin: versatile, replaceable, lasting tactile skins,
R. Bhirangi, T. Hellebrekers, C. Majidi, and A. Gupta, “Reskin: versatile, replaceable, lasting tactile skins,” in5th Annual Conference on Robot Learning, 2021. [Online]. Available: https://proceedings.mlr.press/v164/ bhirangi22a/bhirangi22a.pdf
work page 2021
-
[42]
T. P. Tomo, A. Schmitz, W. K. Wong, H. Kristanto, S. Somlor, J. Hwang, L. Jamone, and S. Sugano, “Covering a Robot Fingertip With uSkin: A Soft Electronic Skin With Distributed 3-Axis Force Sensitive Elements for Robot Hands,”IEEE Robotics and Automation Letters, vol. 3, no. 1, pp. 124–131, 2018. [Online]. Available: https://ieeexplore.ieee.org/document/8000399
-
[43]
3d-vitac: Learning fine-grained manipulation with visuo-tactile sensing,
B. Huang, Y . Wang, X. Yang, Y . Luo, and Y . Li, “3d-vitac: Learning fine-grained manipulation with visuo-tactile sensing,” in8th Annual Conference on Robot Learning, 2024
work page 2024
-
[44]
Self-supervised perception for tactile skin covered dexterous hands,
A. Sharma, C. Higuera, C. K. Bodduluri, Z. Liu, T. Fan, T. Hellebrekers, M. Lambeta, B. Boots, M. Kaess, T. Wu, F. R. Hogan, and M. Mukadam, “Self-supervised perception for tactile skin covered dexterous hands,” in 9th Annual Conference on Robot Learning, 2025. [Online]. Available: https://openreview.net/forum?id=eLeCrM5PEO
work page 2025
-
[45]
Tactile-rl for insertion: Generalization to objects of unknown geometry,
S. Dong, D. Jha, D. Romeres, S. Kim, D. Nikovski, and A. Rodriguez, “Tactile-rl for insertion: Generalization to objects of unknown geometry,” in2021 IEEE International Conference on Robotics and Automation (ICRA), 2021. [Online]. Available: https://arxiv.org/pdf/2104.01167.pdf
-
[46]
Cable manipulation with a tactile-reactive gripper,
Y . She, S. Wang, S. Dong, N. Sunil, A. Rodriguez, and E. Adelson, “Cable manipulation with a tactile-reactive gripper,”The International Journal of Robotics Research, vol. 40, no. 12-14, pp. 1385–1401, 2021
work page 2021
-
[47]
Tactile slam: Real-time inference of shape and pose from planar pushing,
S. Suresh, M. Bauza, K.-T. Yu, J. G. Mangelson, A. Rodriguez, and M. Kaess, “Tactile slam: Real-time inference of shape and pose from planar pushing,” in2021 IEEE international conference on robotics and automation (ICRA). IEEE, 2021, pp. 11 322–11 328
work page 2021
-
[48]
Sparsh: Self-supervised touch representations for vision-based tactile sensing,
C. Higuera, A. Sharma, C. K. Bodduluri, T. Fan, P. Lancaster, M. Kalakrishnan, M. Kaess, B. Boots, M. Lambeta, T. Wu, and M. Mukadam, “Sparsh: Self-supervised touch representations for vision-based tactile sensing,” 2024. [Online]. Available: https: //openreview.net/forum?id=xYJn2e1uu8
work page 2024
-
[49]
Transferable tactile transformers for representation learning across diverse sensors and tasks,
J. Zhao, Y . Ma, L. Wang, and E. H. Adelson, “Transferable tactile transformers for representation learning across diverse sensors and tasks,” 2024
work page 2024
-
[50]
Lessons from learning to spin “pens
J. Wang, Y . Yuan, H. Che, H. Qi, Y . Ma, J. Malik, and X. Wang, “Lessons from learning to spin “pens”,” inCoRL, 2024
work page 2024
-
[51]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Prox- imal policy optimization algorithms,”arXiv preprint arXiv:1707.06347, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[52]
A reduction of imitation learning and structured prediction to no-regret online learning,
S. Ross, G. Gordon, and D. Bagnell, “A reduction of imitation learning and structured prediction to no-regret online learning,” inProceedings of the fourteenth international conference on artificial intelligence and statistics. JMLR Workshop and Conference Proceedings, 2011, pp. 627–635
work page 2011
-
[53]
Asymmetric Actor Critic for Image-Based Robot Learning
L. Pinto, M. Andrychowicz, P. Welinder, W. Zaremba, and P. Abbeel, “Asymmetric actor critic for image-based robot learning,”arXiv preprint arXiv:1710.06542, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[54]
Bootstrap your own latent-a new approach to self-supervised learning,
J.-B. Grill, F. Strub, F. Altché, C. Tallec, P. Richemond, E. Buchatskaya, C. Doersch, B. Avila Pires, Z. Guo, M. Gheshlaghi Azaret al., “Bootstrap your own latent-a new approach to self-supervised learning,”Advances in neural information processing systems, vol. 33, pp. 21 271–21 284, 2020
work page 2020
-
[55]
Data2vec: A general framework for self-supervised learning in speech, vision and language,
A. Baevski, W.-N. Hsu, Q. Xu, A. Babu, J. Gu, and M. Auli, “Data2vec: A general framework for self-supervised learning in speech, vision and language,” inInternational conference on machine learning. PMLR, 2022, pp. 1298–1312
work page 2022
-
[56]
F. Dellaert and G. Contributors, “borglab/gtsam,” May 2022. [Online]. Available: https://github.com/borglab/gtsam)
work page 2022
-
[57]
General In-Hand Object Rotation with Vision and Touch,
H. Qi, B. Yi, S. Suresh, M. Lambeta, Y . Ma, R. Calandra, and J. Malik, “General In-Hand Object Rotation with Vision and Touch,” inConference on Robot Learning (CoRL), 2023
work page 2023
-
[58]
On the continuity of rotation representations in neural networks,
Y . Zhou, C. Barnes, J. Lu, J. Yang, and H. Li, “On the continuity of rotation representations in neural networks,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2019, pp. 5745–5753
work page 2019
-
[59]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
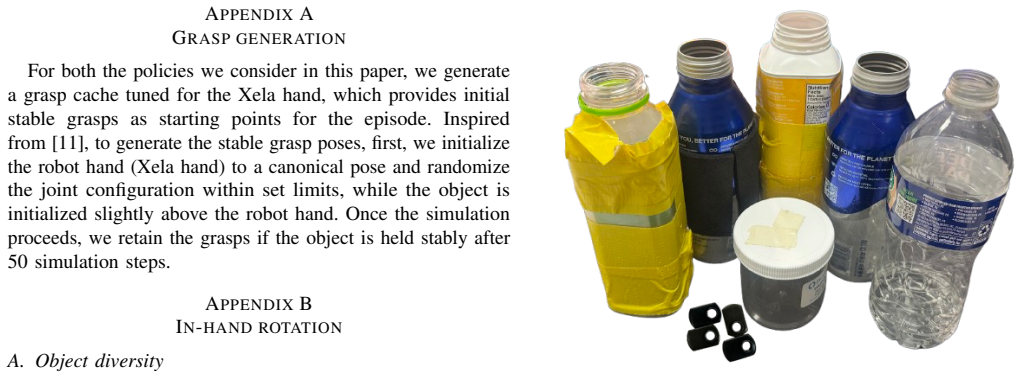
V . Makoviychuk, L. Wawrzyniak, Y . Guo, M. Lu, K. Storey, M. Macklin, D. Hoeller, N. Rudin, A. Allshire, A. Handaet al., “Isaac gym: High performance gpu-based physics simulation for robot learning,”arXiv preprint arXiv:2108.10470, 2021. APPENDIXA GRASP GENERATION For both the policies we consider in this paper, we generate a grasp cache tuned for the Xe...
work page internal anchor Pith review Pith/arXiv arXiv 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.