Recognition: 1 theorem link
· Lean TheoremVision-Based Hand Shadowing for Robotic Manipulation via Inverse Kinematics
Pith reviewed 2026-05-15 12:27 UTC · model grok-4.3
The pith
An egocentric RGB-D camera retargets hand motion to a low-cost robot arm via inverse kinematics at 86.7 percent success on structured pick-and-place.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
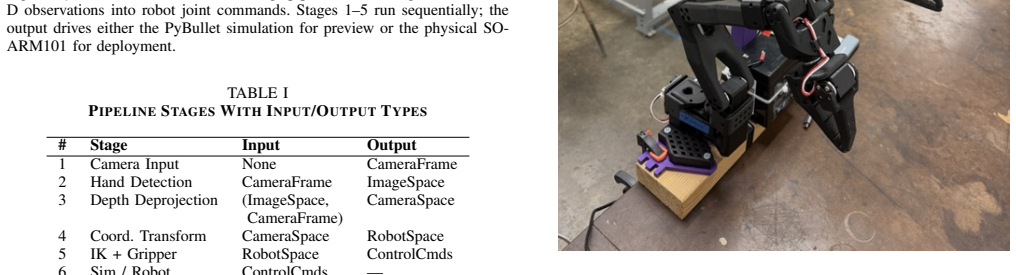
The pipeline maps 21 MediaPipe hand landmarks through depth deprojection and coordinate transformation into a damped-least-squares IK solver that produces feasible joint trajectories for the six-degree-of-freedom SO-ARM101, achieving 86.7 percent success and 36.4 mm mean position error on repeated pick-and-place trials while outperforming several trained vision-language-action policies on the same structured task.
What carries the argument
Damped-least-squares inverse-kinematics solver that converts deprojected 3D hand landmarks into robot joint angles.
If this is right
- Gripper opening is set directly from measured thumb-index distance with a hierarchy of fallback modes.
- Exponential moving-average smoothing cuts trajectory jerk by 57 to 68 percent.
- Every computed action can be previewed inside a physics simulator before execution on the physical arm.
- Swapping the detector for WiLoR raises hand-detection rate by 8 percent under partial occlusion.
Where Pith is reading between the lines
- The same analytical retargeting could lower the data-collection burden for learning-based teleoperation if occlusion handling improves.
- Tighter integration of depth uncertainty into the IK cost function might shrink the observed 36 mm position error for finer manipulation.
- Extending the method to two hands or to dynamic obstacles would test whether the current single-camera assumption scales beyond the tested grid.
Load-bearing premise
Hand-landmark detections stay accurate enough after deprojection and frame change for the IK solver to generate collision-free trajectories even when the hand is partly hidden or lighting varies.
What would settle it
Running the pipeline on the same benchmark while artificially adding realistic hand-occlusion noise or depth errors and measuring whether success falls below 50 percent.
Figures






read the original abstract
Teleoperation of low-cost robotic manipulators remains challenging due to the difficulty of retargeting human hand motion to robot joint commands. We present an offline hand-shadowing inverse-kinematics (IK) retargeting pipeline driven by a single egocentric RGB-D camera mounted on 3D-printed glasses. The pipeline detects 21 hand landmarks per hand using MediaPipe Hands, deprojects them into 3D via depth sensing, transforms them into the robot coordinate frame, and solves a damped-least-squares IK problem to produce joint commands for the SO-ARM101 robot (5 arm + 1 gripper joints). A gripper controller maps thumb-index finger geometry to grasp aperture with a multi-level fallback hierarchy. Actions are previewed in a physics simulation before replay on the physical robot. We evaluate the pipeline on a structured pick-and-place benchmark (5-tile grid, 10 grasps per tile, 3 independent runs) achieving an 86.7% +/- 4.2% success rate, and compare it against four vision-language-action (VLA) policies (ACT, SmolVLA, pi_0.5, GR00T N1.5) trained on leader-follower teleoperation data. We provide a quantitative error analysis of the pipeline, reporting a mean IK position error of 36.4 mm, trajectory smoothness metrics showing 57-68% jerk reduction from EMA smoothing, and an ablation study over the smoothing parameter. We also test the pipeline in unstructured real-world environments (grocery store, pharmacy) and find that success is reduced to 9.3% due to hand occlusion by surrounding objects. To mitigate this, we integrate WiLoR as an alternative hand detector, achieving an 8% improvement in hand detection rate over MediaPipe, highlighting both the promise and current limitations of marker-free analytical retargeting.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents an offline vision-based hand-shadowing pipeline for retargeting human hand motion to a low-cost SO-ARM101 robot via a single egocentric RGB-D camera. Hand landmarks are detected with MediaPipe (or WiLoR), deprojected to 3D, transformed to the robot frame, and mapped to joint commands using damped-least-squares IK; a thumb-index geometry controller handles the gripper with fallback logic, and actions are previewed in simulation before physical replay. On a structured 5-tile pick-and-place benchmark the pipeline reports 86.7% +/- 4.2% success, 36.4 mm mean IK position error, and 57-68% jerk reduction via EMA smoothing, while outperforming or matching four VLA baselines and explicitly quantifying the drop to 9.3% success under occlusion.
Significance. If the reported metrics hold, the work supplies a lightweight, analytical, marker-free alternative to learned VLA policies for hand retargeting, with direct physical-robot measurements, an ablation on smoothing, and an honest scope limitation on unstructured scenes. The explicit failure-mode quantification and WiLoR mitigation test strengthen the contribution for practical low-cost teleoperation.
major comments (2)
- [§4.2] §4.2 (benchmark results): the 86.7% success rate is measured on a 5-tile grid with 10 grasps per tile and 3 runs, yet the distribution of the 36.4 mm mean IK position error across tiles is not broken down; if errors concentrate near tile edges this could systematically inflate failure rates and weaken the claim that the pipeline is reliable for structured tasks.
- [§5] §5 (VLA comparison): the four baselines are trained on leader-follower teleoperation data, but the manuscript does not state whether the data collection used the identical egocentric camera pose, lighting, and hand visibility conditions as the proposed pipeline; without this alignment the performance gap may partly reflect domain shift rather than retargeting method superiority.
minor comments (3)
- [§3.3] The multi-level fallback hierarchy for the gripper controller is mentioned only in the abstract; a concise pseudocode or decision tree in §3.3 would improve reproducibility.
- [Figures 4-5] Figure captions for the smoothness and ablation plots should explicitly state the EMA alpha values tested and the exact jerk metric (e.g., mean squared jerk) used to obtain the 57-68% reduction figures.
- [§3.2] The coordinate-frame transformation between camera and robot base is described at high level; adding the explicit rotation matrix or homogeneous transform equation would aid readers attempting to replicate the deprojection step.
Simulated Author's Rebuttal
We are grateful to the referee for the positive assessment and recommendation for minor revision. We address each major comment below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [§4.2] §4.2 (benchmark results): the 86.7% success rate is measured on a 5-tile grid with 10 grasps per tile and 3 runs, yet the distribution of the 36.4 mm mean IK position error across tiles is not broken down; if errors concentrate near tile edges this could systematically inflate failure rates and weaken the claim that the pipeline is reliable for structured tasks.
Authors: We agree that a per-tile breakdown of the IK position error would strengthen transparency and directly address the possibility of edge-related bias in the reported success rates. We will add this breakdown (as a table or supplementary figure) to the revised §4.2, allowing readers to inspect the error distribution across the five tiles. revision: yes
-
Referee: [§5] §5 (VLA comparison): the four baselines are trained on leader-follower teleoperation data, but the manuscript does not state whether the data collection used the identical egocentric camera pose, lighting, and hand visibility conditions as the proposed pipeline; without this alignment the performance gap may partly reflect domain shift rather than retargeting method superiority.
Authors: We acknowledge that the manuscript does not currently specify the precise alignment of data-collection conditions. We will revise §5 to explicitly describe the leader-follower data collection setup (same robot, camera pose, and laboratory environment) and add a short discussion of any remaining differences in lighting or hand visibility, together with their potential impact on the comparison. revision: yes
Circularity Check
No significant circularity; empirical metrics are measured directly
full rationale
The manuscript presents an empirical pipeline for hand-shadowing IK retargeting using standard MediaPipe landmark detection, depth deprojection, coordinate transformation, and damped-least-squares IK solving. All headline results (86.7% success rate, 36.4 mm mean position error, jerk reductions) are obtained from direct physical robot trials on a structured benchmark and simulation replay, not from any fitted parameters, self-referential equations, or derivations that reduce to the inputs by construction. No self-citation load-bearing steps, uniqueness theorems, or ansatzes are invoked to justify the core claims; the occlusion failure case is explicitly quantified as a scope limitation rather than hidden. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (2)
- IK damping factor
- EMA smoothing alpha
axioms (2)
- domain assumption MediaPipe Hands 2D landmarks can be accurately deprojected to metric 3D using the depth channel of the egocentric RGB-D camera.
- domain assumption The robot's forward kinematics model is exact and the damped-least-squares IK solver converges to a usable joint configuration for every reachable target.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The pipeline detects 21 hand landmarks per hand using MediaPipe Hands, deprojects them into 3D via depth sensing, transforms them into the robot coordinate frame, and solves a damped-least-squares IK problem
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
WiLoR: End-to- end 3D hand localization and reconstruction in-the-wild,
R. A. Potamias, J. Zhang, J. Deng, and S. Zafeiriou, “WiLoR: End-to- end 3D hand localization and reconstruction in-the-wild,”arXiv preprint arXiv:2409.12259, 2024
-
[2]
MediaPipe Hands: On-device real-time hand tracking,
F. Zhang, V . Bazarevsky, A. Vakunov, A. Tkachenka, G. Sung, C.- L. Chang, and M. Grundmann, “MediaPipe Hands: On-device real-time hand tracking,”arXiv preprint arXiv:2006.10214, 2020
-
[3]
Embodied hands: Modeling and capturing hands and bodies together,
J. Romero, D. Tzionas, and M. J. Black, “Embodied hands: Modeling and capturing hands and bodies together,”ACM Trans. Graphics (Proc. SIGGRAPH Asia), vol. 36, no. 6, pp. 245:1–245:17, 2017
work page 2017
-
[4]
Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn, “Learning fine- grained bimanual manipulation with low-cost hardware,”arXiv preprint arXiv:2304.13705, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[5]
SmolVLA: A Vision-Language-Action Model for Affordable and Efficient Robotics
F. Cadenaet al., “SmolVLA: A vision-language-action model for af- fordable and efficient robotics,”arXiv preprint arXiv:2506.01844, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[6]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
K. Blacket al., “π 0: A vision-language-action flow model for general robot control,”arXiv preprint arXiv:2410.24164, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[7]
Open-TeleVision: Teleoperation with immersive active visual feedback,
X. Chenget al., “Open-TeleVision: Teleoperation with immersive active visual feedback,” inProc. CoRL, 2025
work page 2025
-
[8]
Bunny-VisionPro: Real-time bimanual dexterous teleop- eration for imitation learning,
Y . Dinget al., “Bunny-VisionPro: Real-time bimanual dexterous teleop- eration for imitation learning,”arXiv preprint arXiv:2407.03162, 2024
-
[9]
Intel RealSense stereoscopic depth cameras,
L. Keselman, J. I. Woodfill, A. Grunnet-Jepsen, and A. Bhowmik, “Intel RealSense stereoscopic depth cameras,” inProc. CCD Workshop, CVPR, 2017
work page 2017
-
[10]
PyBullet, a Python module for physics simulation for games, robotics and machine learning,
E. Coumans and Y . Bai, “PyBullet, a Python module for physics simulation for games, robotics and machine learning,” http://pybullet.org, 2016–2021. 9
work page 2016
-
[11]
LeRobot: State-of-the-art machine learning for real- world robotics,
Hugging Face, “LeRobot: State-of-the-art machine learning for real- world robotics,” https://github.com/huggingface/lerobot, 2024
work page 2024
-
[12]
SO-ARM100: Open-source 6-DOF robotic arm,
The Robot Studio, “SO-ARM100: Open-source 6-DOF robotic arm,” https://github.com/TheRobotStudio/SO-ARM100, 2024
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.