Recognition: no theorem link
Rethinking Forward Processes for Score-Based Data Assimilation in High Dimensions
Pith reviewed 2026-05-13 18:16 UTC · model grok-4.3
The pith
A measurement-aware forward process built from the measurement equation yields exact likelihood scores for score-based data assimilation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
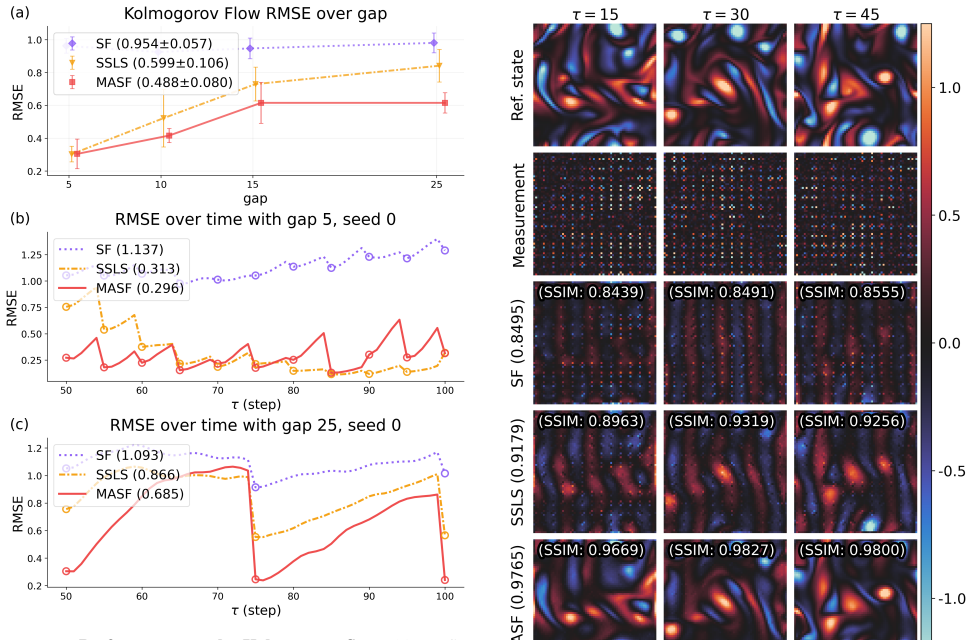
We propose a measurement-aware score-based filter (MASF) that defines a measurement-aware forward process directly from the measurement equation. This construction makes the likelihood score analytically tractable: for linear measurements, we derive the exact likelihood score and combine it with a learned prior score to obtain the posterior score.
What carries the argument
The measurement-aware forward process constructed directly from the measurement equation, which renders the likelihood score exact rather than approximate.
If this is right
- The measurement-update step no longer relies on heuristic approximations of the likelihood score.
- Posterior scores are formed by direct addition of an exact likelihood score and a learned prior score.
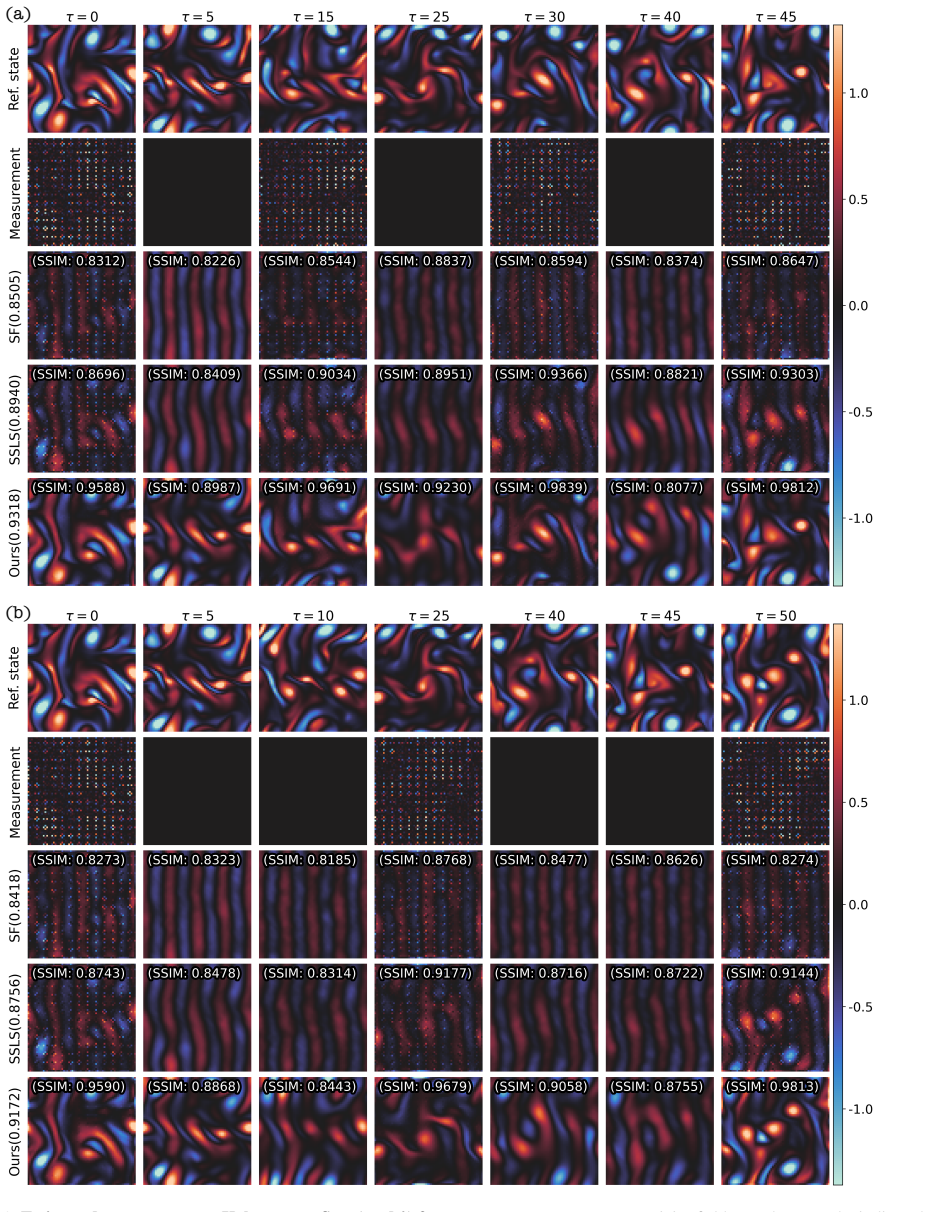
- Error accumulation across sequential assimilation steps is reduced in high-dimensional settings.
- Numerical experiments on high-dimensional datasets show gains in accuracy and stability over existing score-based filters.
Where Pith is reading between the lines
- The construction may extend to mildly nonlinear measurements by retaining the same forward-process logic with local linearizations.
- Long-horizon assimilation chains could see compounding benefits from the absence of per-step heuristic error.
- The same measurement-aware principle might be tested in other generative-model-based filtering frameworks outside score-based diffusion.
Load-bearing premise
Building the forward process directly from the measurement equation preserves the diffusion properties required for stable score-based sampling and does not create new instabilities or extra approximation errors in high dimensions.
What would settle it
Run the proposed MASF and a standard score-based filter side-by-side on a high-dimensional linear measurement assimilation task and check whether the new method exhibits lower error accumulation or greater instability over long sequences.
Figures







read the original abstract
Data assimilation is the process of estimating the time-evolving state of a dynamical system by integrating model predictions and noisy observations. It is commonly formulated as Bayesian filtering, but classical filters often struggle with accuracy or computational feasibility in high dimensions. Recently, score-based generative models have emerged as a scalable approach for high-dimensional data assimilation, enabling accurate modeling and sampling of complex distributions. However, existing score-based filters often specify the forward process independently of the data assimilation. As a result, the measurement-update step depends on heuristic approximations of the likelihood score, which can accumulate errors and degrade performance over time. Here, we propose a measurement-aware score-based filter (MASF) that defines a measurement-aware forward process directly from the measurement equation. This construction makes the likelihood score analytically tractable: for linear measurements, we derive the exact likelihood score and combine it with a learned prior score to obtain the posterior score. Numerical experiments covering a range of settings, including high-dimensional datasets, demonstrate improved accuracy and stability over existing score-based filters.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a measurement-aware score-based filter (MASF) for data assimilation that constructs the forward process directly from the linear measurement equation y = Hx + ε. This yields an exact, analytically tractable likelihood score that is added to a learned prior score to form the posterior score, with the claim that the approach improves accuracy and stability over existing score-based filters in high dimensions.
Significance. If the measurement-aware forward process preserves the Markov diffusion structure and the standard existence/uniqueness conditions for the reverse SDE, the method would reduce reliance on heuristic likelihood approximations and could deliver more reliable posterior sampling in high-dimensional assimilation tasks.
major comments (3)
- [§3] The construction of the measurement-aware forward process (described in the abstract and §3) must explicitly verify that the resulting drift and diffusion coefficients satisfy the Lipschitz and linear-growth conditions required for a unique strong solution to the SDE; without this, the exact likelihood term does not automatically cancel potential non-Markovian artifacts or variance explosion in high dimensions.
- [§4.1] The derivation of the exact likelihood score ∇ log p(y|x_t) for linear measurements (claimed in the abstract) is not reproduced in sufficient detail to confirm it follows directly from the measurement equation without additional approximations; the full steps, including the explicit form of the forward SDE and assumptions on H and ε, are needed to support the central claim.
- [Experiments] High-dimensional numerical experiments must include diagnostics (e.g., trajectory variance, checks on marginal Fokker-Planck consistency, or Markov property preservation) to demonstrate that the new forward process does not introduce instabilities absent in standard score-based filters.
minor comments (2)
- [Abstract] The abstract refers to 'a range of settings' without enumeration; listing the specific datasets or dimensions would improve clarity.
- [Notation] Notation for the time-dependent coefficients in the forward process should be defined once and used consistently to avoid ambiguity when combining prior and likelihood scores.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major point below and have revised the manuscript to incorporate the requested clarifications, proofs, and diagnostics.
read point-by-point responses
-
Referee: [§3] The construction of the measurement-aware forward process (described in the abstract and §3) must explicitly verify that the resulting drift and diffusion coefficients satisfy the Lipschitz and linear-growth conditions required for a unique strong solution to the SDE; without this, the exact likelihood term does not automatically cancel potential non-Markovian artifacts or variance explosion in high dimensions.
Authors: We agree that explicit verification of the Lipschitz and linear-growth conditions is required for rigor. In the revised §3 we have added a dedicated subsection proving that, under the standing assumptions of a bounded linear operator H and Gaussian measurement noise ε with finite second moments, both the drift and diffusion coefficients of the measurement-aware forward process satisfy the global Lipschitz and linear-growth conditions. This guarantees a unique strong solution to the SDE and confirms that the exact likelihood score does not introduce non-Markovian artifacts or uncontrolled variance growth. revision: yes
-
Referee: [§4.1] The derivation of the exact likelihood score ∇ log p(y|x_t) for linear measurements (claimed in the abstract) is not reproduced in sufficient detail to confirm it follows directly from the measurement equation without additional approximations; the full steps, including the explicit form of the forward SDE and assumptions on H and ε, are needed to support the central claim.
Authors: We have expanded §4.1 with the complete derivation. Starting from the linear measurement model y = Hx + ε with ε ∼ N(0,R), the measurement-aware forward SDE is defined as dx_t = [f(x_t) + g(t)^2 H^T R^{-1}(y − H μ_t)] dt + g(t) dW_t, where μ_t is the conditional mean under the forward process. We then compute the conditional density p(y|x_t) explicitly, yielding the exact score ∇_x log p(y|x_t) = −H^T R^{-1}(H μ_t − y) with no further approximations. All assumptions (H linear and bounded, R positive definite and known) are now stated at the beginning of the section. revision: yes
-
Referee: [Experiments] High-dimensional numerical experiments must include diagnostics (e.g., trajectory variance, checks on marginal Fokker-Planck consistency, or Markov property preservation) to demonstrate that the new forward process does not introduce instabilities absent in standard score-based filters.
Authors: We agree that such diagnostics strengthen the empirical validation. The revised experiments section now includes (i) plots of trajectory variance versus time for all high-dimensional test cases, (ii) numerical residuals measuring consistency with the marginal Fokker–Planck equation, and (iii) empirical checks of the Markov property via conditional independence tests on sampled trajectories. These diagnostics show that the measurement-aware forward process introduces no additional instabilities relative to standard score-based filters. revision: yes
Circularity Check
No significant circularity: measurement-aware forward process derived independently from measurement equation
full rationale
The central construction defines the forward process directly from the linear measurement equation y = Hx + ε, yielding an exact closed-form likelihood score that is added to a separately learned prior score. This addition does not reduce the derived likelihood term to any fitted quantity or self-citation; the prior-score learning step remains an independent input. No equation in the provided chain equates a prediction to its own fitting procedure by construction, nor does any load-bearing uniqueness claim rest on prior work by the same authors. The derivation is therefore self-contained relative to standard score-based diffusion theory.
Axiom & Free-Parameter Ledger
free parameters (1)
- learned prior score network parameters
axioms (2)
- domain assumption Score-based generative models can accurately approximate the score of high-dimensional distributions
- ad hoc to paper A forward process constructed from the measurement equation preserves the required marginal properties for diffusion sampling
Reference graph
Works this paper leans on
-
[1]
H. G. Chipilski, X. Wang, and D. B. Parsons. Impact of as- similating pecan profilers on the prediction of bore-driven nocturnal convection: a multiscale forecast evaluation for the 6 july 2015 case study.Monthly Weather Review, 148: 1147–1175,
work page 2015
-
[2]
Diffusion Models Beat GANs on Image Synthesis
URL https://arxiv. org/abs/2105.05233. Aapo Hyv¨arinen. Estimation of non-normalized statistical models by score matching.Journal of Machine Learning Research,
work page internal anchor Pith review Pith/arXiv arXiv
-
[3]
9 Feng Bao, Zezhong Zhang, and Guannan Zhang
URL https: //openreview.net/forum?id=VUvLSnMZdX. 9 Feng Bao, Zezhong Zhang, and Guannan Zhang. A score- based filter for nonlinear data assimilation.Journal of Computational Physics, 2024a. Feng Bao, Zezhong Zhang, and Guannan Zhang. An ensem- ble score filter for tracking high-dimensional nonlinear dynamical systems.Computer Methods in Applied Me- chanic...
-
[4]
URL https://arxiv.org/abs/ 2411.13443. K. J. H. Law, Andrew M. Stuart, and Konstantinos C. Zy- galakis.Data Assimilation: A Mathematical Introduction. Springer,
work page internal anchor Pith review Pith/arXiv arXiv
-
[5]
Improved denois- ing diffusion probabilistic models.arXiv preprint arXiv:2102.09672,
Alex Nichol and Prafulla Dhariwal. Improved denois- ing diffusion probabilistic models.arXiv preprint arXiv:2102.09672,
-
[6]
doi: 10.1109/TIP.2003. 819861. Edward N. Lorenz. Deterministic nonperiodic flow.Journal of the Atmospheric Sciences, 20(2):130–141,
-
[7]
Christopher Bishop.Pattern Recognition and Machine Learning
doi: 10.1175/1520-0469(1963)020⟨0130:DNF⟩2.0.CO;2. Christopher Bishop.Pattern Recognition and Machine Learning. Springer,
-
[8]
doi: 10.1016/0021-8928(62)90149-1. Gary J. Chandler and Richard R. Kerswell. Invariant recur- rent solutions embedded in a turbulent two-dimensional kolmogorov flow.Journal of Fluid Mechanics, 722:554– 595,
-
[9]
doi: 10.1017/jfm.2013.122. Dmitrii Kochkov, Jamie A. Smith, Ayya Alieva, Qing Wang, Michael P. Brenner, and Stephan Hoyer. Machine learning–accelerated computational fluid dynamics.Pro- ceedings of the National Academy of Sciences, 118(21): e2101784118, 2021a. doi: 10.1073/pnas.2101784118. Dmitrii Kochkov, Jamie A. Smith, Peter Norgaard, Gideon Dresdner, ...
-
[10]
Data assimilation in the latent space of a neural network.arXiv preprint arXiv:2012.12056,
Maddalena Amendola, Rossella Arcucci, Laetitia Mottet, Cesar Quilodran Casas, Shiwei Fan, Christopher Pain, Paul Linden, and Yi-Ke Guo. Data assimilation in the latent space of a neural network.arXiv preprint arXiv:2012.12056,
-
[11]
doi: 10.48550/arXiv.2012. 12056. 10 Hang Fan, Yubao Liu, Zhaoyang Huo, Yuewei Liu, Yueqin Shi, and Yang Li. A novel latent space data assimilation framework with autoencoder-observation to latent space. Monthly Weather Review,
-
[12]
Ivo Pasmans, Yumeng Chen, Tobias Sebastian Finn, Marc Bocquet, and Alberto Carrassi. Ensemble kalman filter in latent space using a variational autoencoder pair.arXiv preprint arXiv:2502.12987,
-
[13]
Maria Cruz Varona, Raphael Gebhart, Julian Suk, and Boris Lohmann. Practicable simulation-free model order re- duction by nonlinear moment matching.arXiv preprint arXiv:1901.10750,
-
[14]
= Σ(s)from (69) yields (77). 15 Proof.From Theorem B.1, the conditional density is p(z|x t) = (2π)−d/2 |Σt→1|− 1 2 exp − 1 2(z−M t→1xt)TΣ−1 t→1(z−M t→1xt) .(79) Hence logp(z|x t) =− 1 2(z−M t→1xt)TΣ−1 t→1(z−M t→1xt)− 1 2 log|Σ t→1| − d 2 log(2π).(80) The last two terms do not depend on xt. For the quadratic term, using ∇xt(z−M t→1xt) =−M t→1 and the symme...
work page 1982
-
[15]
Model architecture.For Lorenz–63, we use a time-conditioned MLP Bishop [2006], Perez et al
We uset default = 0.992for the terminal time. Model architecture.For Lorenz–63, we use a time-conditioned MLP Bishop [2006], Perez et al
work page 2006
-
[16]
Model architecture.For Lorenz–96, we use a 1D U-Net Stoller et al
We uset default = 0.992for the terminal time. Model architecture.For Lorenz–96, we use a 1D U-Net Stoller et al. [2018], Perslev et al
work page 2018
-
[17]
Training setup.We train for500epochs and learning rate3×10 −4, using a validation split of0.1
We set dropout to 0.0 and do not use self-conditioning or learned variance. Training setup.We train for500epochs and learning rate3×10 −4, using a validation split of0.1. D.3 Kolmogorov Flow: Configuration Details Dynamics and data generation.We generate 2D trajectories from Kolmogorov flow Meshalkin and Sinai [1961], Chandler and Kerswell
work page 1961
-
[18]
Each state is a velocity field xt ∈R 2×64×64
on the 64×64 grid. Each state is a velocity field xt ∈R 2×64×64. We simulate trajectories with Reynolds numberRe = 2000using the step sizedt= 0.2from50to100. 18 Measurement equation.We use a grid-masked measurement equation with additive Gaussian noise: zτ =M⊙x τ +σϵ,ϵ∼ N(0, I),(110) where M∈ {0,1} 1×1×64×64 is a pixel-wise mask and ⊙ denotes element-wise...
work page 2006
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.