Recognition: 2 theorem links
· Lean TheoremCoupled Control, Structured Memory, and Verifiable Action in Agentic AI (SCRAT -- Stochastic Control with Retrieval and Auditable Trajectories): A Comparative Perspective from Squirrel Locomotion and Scatter-Hoarding
Pith reviewed 2026-05-13 19:51 UTC · model grok-4.3
The pith
Squirrel locomotion and scatter-hoarding supply a model for coupling fast control, structured memory, and verifiable action inside one agentic AI system under partial observability.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
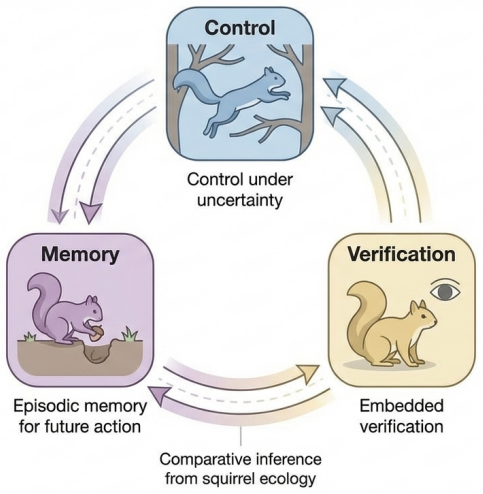
A minimal hierarchical partially observed control model with latent dynamics, structured episodic memory, observer-belief state, option-level actions, and delayed verifier signals can be inferred from squirrel arboreal locomotion, scatter-hoarding, and audience-sensitive caching, and this coupling produces testable improvements in robustness, delayed retrieval, and verification under asymmetric information.
What carries the argument
The explicit inference ladder (empirical observation to minimal computational inference to AI design conjecture) together with the hierarchical partially observed control model that places structured episodic memory and observer-belief states inside the action-verifier loop.
If this is right
- Fast local feedback plus predictive compensation improves robustness when hidden dynamics shift.
- Memory organized for future control improves delayed retrieval when cues conflict or load increases.
- Placing verifiers and observer models inside the action-memory loop reduces silent failure and information leakage.
- Role-differentiated proposer, executor, checker, and adversary components can lower correlated error under asymmetric information.
Where Pith is reading between the lines
- The same coupling pattern could be tested directly in simulated environments that combine locomotion, caching, and observation tasks to generate quantitative benchmarks.
- Extending the observer-belief state to multi-agent settings may address verification problems that arise when several AI systems interact under partial information.
- The inference ladder itself could be applied to other biological systems that solve similar triads of control, memory, and verification, such as certain birds or primates, to generate further design conjectures.
Load-bearing premise
Biological mechanisms observed in squirrels can be mapped onto AI architectures through an explicit inference ladder without quantitative validation or loss of fidelity.
What would settle it
Build two agent systems, one using the proposed integrated model and one using separate control and memory modules, and measure whether the integrated version shows measurably lower silent failure rates and better delayed retrieval on a task with hidden dynamics shifts and strategic observers; if the difference disappears or reverses, the coupling claim does not hold.
Figures


read the original abstract
Agentic AI is increasingly judged not by fluent output alone but by whether it can act, remember, and verify under partial observability, delay, and strategic observation. Existing research often studies these demands separately: robotics emphasizes control, retrieval systems emphasize memory, and alignment or assurance work emphasizes checking and oversight. This article argues that squirrel ecology offers a sharp comparative case because arboreal locomotion, scatter-hoarding, and audience-sensitive caching couple all three demands in one organism. We synthesize evidence from fox, eastern gray, and, in one field comparison, red squirrels, and impose an explicit inference ladder: empirical observation, minimal computational inference, and AI design conjecture. We introduce a minimal hierarchical partially observed control model with latent dynamics, structured episodic memory, observer-belief state, option-level actions, and delayed verifier signals. This motivates three hypotheses: (H1) fast local feedback plus predictive compensation improves robustness under hidden dynamics shifts; (H2) memory organized for future control improves delayed retrieval under cue conflict and load; and (H3) verifiers and observer models inside the action-memory loop reduce silent failure and information leakage while remaining vulnerable to misspecification. A downstream conjecture is that role-differentiated proposer/executor/checker/adversary systems may reduce correlated error under asymmetric information and verification burden. The contribution is a comparative perspective and benchmark agenda: a disciplined program of falsifiable claims about the coupling of control, memory, and verifiable action.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a comparative perspective arguing that squirrel behaviors involving arboreal locomotion, scatter-hoarding, and audience-sensitive caching provide an integrated model for coupling control, memory, and verifiable action in agentic AI systems. It synthesizes biological evidence and proposes the SCRAT (Stochastic Control with Retrieval and Auditable Trajectories) model as a minimal hierarchical partially observed Markov decision process (POMDP) incorporating latent dynamics, structured episodic memory, observer-belief states, option-level actions, and delayed verifier signals. This framework motivates three specific hypotheses (H1-H3) on robustness under hidden dynamics, memory for delayed retrieval, and verification to reduce failures, along with a conjecture on role-differentiated agent systems. The main contribution is framed as establishing a benchmark agenda with falsifiable claims.
Significance. Should the inference from squirrel ecology to AI architectures be successfully quantified and tested, this work could significantly influence the design of agentic AI by providing a biologically inspired, integrated approach to handling partial observability, delays, and strategic interactions. The focus on verifiable action and structured memory addresses key challenges in current AI research. The proposal of falsifiable hypotheses and a benchmark agenda represents a constructive step toward empirical validation in this interdisciplinary space.
major comments (3)
- [Section introducing the SCRAT model and hypotheses] The central hypotheses (H1: fast local feedback plus predictive compensation; H2: memory organized for future control; H3: verifiers and observer models) are presented without any supporting quantitative data, derivations, or error analysis from the squirrel observations, making the claims rest on qualitative analogy alone.
- [Description of the inference ladder] The 'explicit inference ladder' from empirical observation to minimal computational inference to AI design conjecture is described in the abstract and introduction but the computational inference step lacks any equations, mappings, or intermediate models that would connect specific squirrel field data (e.g., caching rates) to the POMDP components.
- [Model formalization] Although the SCRAT model is introduced as a minimal hierarchical POMDP-like structure with components such as latent dynamics and episodic memory, no formal equations, state definitions, or transition functions are provided, preventing assessment of how the coupling is achieved.
minor comments (2)
- [Abstract] The abstract is quite long and dense; consider condensing the description of the model components for better readability.
- [Terminology] The acronym SCRAT is introduced but its expansion (Stochastic Control with Retrieval and Auditable Trajectories) could be clarified earlier in the text for readers unfamiliar with the domain.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and for recognizing the potential significance of this interdisciplinary perspective. The manuscript is framed as a comparative benchmark agenda synthesizing existing evidence to motivate falsifiable hypotheses, rather than a data-driven empirical study or fully formalized technical model. We address each major comment below and indicate planned revisions.
read point-by-point responses
-
Referee: [Section introducing the SCRAT model and hypotheses] The central hypotheses (H1: fast local feedback plus predictive compensation; H2: memory organized for future control; H3: verifiers and observer models) are presented without any supporting quantitative data, derivations, or error analysis from the squirrel observations, making the claims rest on qualitative analogy alone.
Authors: The hypotheses are motivated by qualitative synthesis of published squirrel ecology literature rather than new quantitative data or derivations from field observations. This is intentional for a perspective paper whose primary contribution is establishing a benchmark agenda with falsifiable claims for future work. We will add a new subsection in the discussion that outlines concrete experimental designs and metrics for testing each hypothesis in AI systems (e.g., robustness under dynamics shifts for H1, retrieval accuracy under cue conflict for H2, and failure/leakage rates for H3). revision: partial
-
Referee: [Description of the inference ladder] The 'explicit inference ladder' from empirical observation to minimal computational inference to AI design conjecture is described in the abstract and introduction but the computational inference step lacks any equations, mappings, or intermediate models that would connect specific squirrel field data (e.g., caching rates) to the POMDP components.
Authors: We agree the computational inference step can be clarified. While the paper analyzes no new field data, we will revise the introduction to include a table of high-level mappings from key biological observations (e.g., audience-sensitive caching rates) to POMDP elements such as observer-belief states and delayed verifier signals. This will make the ladder more explicit without adding unsubstantiated equations or quantitative derivations. revision: yes
-
Referee: [Model formalization] Although the SCRAT model is introduced as a minimal hierarchical POMDP-like structure with components such as latent dynamics and episodic memory, no formal equations, state definitions, or transition functions are provided, preventing assessment of how the coupling is achieved.
Authors: The SCRAT model is intentionally described at a minimal conceptual level to emphasize integration across control, memory, and verification. To address the concern, we will add a structured outline (with pseudocode for the overall loop) defining the components and their high-level interactions in a new subsection, while preserving the perspective framing and avoiding full formalization that would exceed the manuscript's scope. revision: yes
Circularity Check
No significant circularity; derivation is analogical perspective without self-referential reduction
full rationale
The paper states an inference ladder from squirrel observations to a hierarchical POMDP-like model and three hypotheses, but supplies no equations, parameter fits, or derivations that would allow any component to reduce to the biological inputs by construction. The model is introduced as motivated by the observations rather than derived from them mathematically, and the hypotheses are framed as downstream conjectures rather than predictions forced by fitted inputs or self-definitions. No self-citations, uniqueness theorems, or ansatzes are invoked in a load-bearing way within the provided text. The contribution is explicitly a comparative perspective and benchmark agenda, which remains self-contained against external benchmarks without circular closure.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Squirrel locomotion, caching, and audience sensitivity can be faithfully abstracted into a single hierarchical partially observed control model with latent dynamics, episodic memory, and delayed verifiers
invented entities (1)
-
SCRAT model
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
minimal hierarchical partially observed control model with latent dynamics, structured episodic memory, observer-belief state, option-level actions, and delayed verifier signals... SCRAT (Stochastic Control with Retrieval and Auditable Trajectories)
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
fast local feedback plus predictive compensation... memory organized for future control... verifiers and observer models inside the action-memory loop
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
Toward a Science of Intent: Closure Gaps and Delegation Envelopes for Open-World AI Agents
Intent compilation turns vague human goals into verifiable artifacts, using closure-gap vectors and delegation envelopes to separate open-world agent challenges from closed-world solvers and to benchmark closure fixes...
Reference graph
Works this paper leans on
-
[1]
Acrobatic squirrels learn to leap and land on tree branches without falling,
N. H. Hunt, J. Jinn, L. F. Jacobs, and R. J. Full, “Acrobatic squirrels learn to leap and land on tree branches without falling,”Science, vol. 373, no. 6555, pp. 697–700, 2021, doi: 10.1126/science.abe5753
-
[2]
Grey squirrels remember the locations of buried nuts,
L. F. Jacobs and E. R. Liman, “Grey squirrels remember the locations of buried nuts,”Animal Behaviour, vol. 41, no. 1, pp. 103–110, 1991, doi: 10.1016/S0003-3472(05)80506-8
-
[3]
Field experiments on duration and precision of grey and red squirrel spatial memory,
I. M. V . Macdonald, “Field experiments on duration and precision of grey and red squirrel spatial memory,” Animal Behaviour, vol. 54, no. 4, pp. 879–891, 1997, doi: 10.1006/anbe.1996.0528
-
[4]
Caching for where and what: evidence for a mnemonic strategy in a scatter- hoarder,
M. M. Delgado and L. F. Jacobs, “Caching for where and what: evidence for a mnemonic strategy in a scatter- hoarder,”Royal Society Open Science, vol. 4, no. 9, Art. no. 170958, 2017, doi: 10.1098/rsos.170958. 13
-
[5]
Fox squirrels match food assessment and cache effort to value and scarcity,
M. M. Delgado, M. Nicholas, D. J. Petrie, and L. F. Jacobs, “Fox squirrels match food assessment and cache effort to value and scarcity,”PLOS ONE, vol. 9, no. 3, Art. no. e92892, 2014, doi: 10.1371/journal.pone.0092892
-
[6]
L. A. Leaver, L. Hopewell, C. Caldwell, and L. Mallarky, “Audience effects on food caching in grey squirrels (Sciurus carolinensis): evidence for pilferage avoidance strategies,”Animal Cognition, vol. 10, no. 1, pp. 23–27, 2007, doi: 10.1007/s10071-006-0026-7
-
[7]
The socioeconomics of food hoarding in wild squirrels,
A. N. Robin and L. F. Jacobs, “The socioeconomics of food hoarding in wild squirrels,”Current Opinion in Behavioral Sciences, vol. 45, Art. no. 101139, 2022, doi: 10.1016/j.cobeha.2022.101139
-
[8]
The functional organization and cortical connections of motor cortex in squirrels,
D. F. Cooke, J. Padberg, T. Zahner, and L. Krubitzer, “The functional organization and cortical connections of motor cortex in squirrels,”Cerebral Cortex, vol. 22, no. 9, pp. 1959–1978, 2012, doi: 10.1093/cercor/bhr228
-
[9]
P. Lavenex, M. A. Steele, and L. F. Jacobs, “Sex differences, but no seasonal variations in the hippocampus of food-caching squirrels: a stereological study,”Journal of Comparative Neurology, vol. 425, no. 1, pp. 152–166, 2000
work page 2000
-
[10]
Optimal feedback control as a theory of motor coordination,
E. Todorov and M. I. Jordan, “Optimal feedback control as a theory of motor coordination,”Nature Neuroscience, vol. 5, no. 11, pp. 1226–1235, 2002, doi: 10.1038/nn963
-
[11]
Internal models in the cerebellum,
D. M. Wolpert, R. C. Miall, and M. Kawato, “Internal models in the cerebellum,”Trends in Cognitive Sciences, vol. 2, no. 9, pp. 338–347, 1998, doi: 10.1016/S1364-6613(98)01221-2
-
[12]
The hippocampus as a predictive map,
K. L. Stachenfeld, M. M. Botvinick, and S. J. Gershman, “The hippocampus as a predictive map,”Nature Neuroscience, vol. 20, no. 11, pp. 1643–1653, 2017, doi: 10.1038/nn.4650
-
[13]
L. P. Kaelbling, M. L. Littman, and A. R. Cassandra, “Planning and acting in partially observable stochastic domains,”Artificial Intelligence, vol. 101, nos. 1–2, pp. 99–134, 1998, doi: 10.1016/S0004-3702(98)00023-X
-
[14]
Between MDPs and semi-MDPs: a framework for temporal abstraction in reinforcement learning,
R. S. Sutton, D. Precup, and S. Singh, “Between MDPs and semi-MDPs: a framework for temporal abstraction in reinforcement learning,”Artificial Intelligence, vol. 112, nos. 1–2, pp. 181–211, 1999, doi: 10.1016/S0004- 3702(99)00052-1
-
[15]
Dyna, an integrated architecture for learning, planning, and reacting,
R. S. Sutton, “Dyna, an integrated architecture for learning, planning, and reacting,”SIGART Bulletin, vol. 2, no. 4, pp. 160–163, 1991, doi: 10.1145/122344.122377
-
[16]
A. Pritzelet al., “Neural episodic control,” inProceedings of the 34th International Conference on Machine Learning, PMLR 70, 2017, pp. 2827–2836
work page 2017
-
[17]
A brief account of runtime verification,
M. Leucker and C. Schallhart, “A brief account of runtime verification,”Journal of Logic and Algebraic Program- ming, vol. 78, no. 5, pp. 293–303, 2009, doi: 10.1016/j.jlap.2008.08.004
-
[18]
Toward Verified Artificial Intelligence,
S. A. Seshia, D. Sadigh, and S. S. Sastry, “Toward Verified Artificial Intelligence,”Communications of the ACM, vol. 65, no. 7, pp. 46–55, 2022, doi: 10.1145/3503914
-
[19]
D. Hafner, J. Pasukonis, J. Ba, and T. Lillicrap, “Mastering diverse control tasks through world models,”Nature, vol. 640, pp. 647–653, 2025, doi: 10.1038/s41586-025-08744-2
-
[20]
D. Ha and J. Schmidhuber, “World Models,” arXiv:1803.10122, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[21]
G. Irving, P. Christiano, and D. Amodei, “AI safety via debate,” arXiv:1805.00899, 2018
work page internal anchor Pith review arXiv 2018
-
[22]
M. Brundageet al., “Toward trustworthy AI development: mechanisms for supporting verifiable claims,” arXiv:2004.07213, 2020
-
[23]
M. Minsky,The Society of Mind. New York, NY , USA: Simon and Schuster, 1986
work page 1986
-
[24]
M. E. Hasselmo,How We Remember: Brain Mechanisms of Episodic Memory. Cambridge, MA, USA: The MIT Press, 2011
work page 2011
-
[25]
AI Agents as Universal Task Solvers: It’s All About Time,
A. Achille and S. Soatto, “AI Agents as Universal Task Solvers: It’s All About Time,” arXiv:2510.12066, 2026
-
[26]
Discovering neural nets with low Kolmogorov complexity and high generalization capability,
J. Schmidhuber, “Discovering neural nets with low Kolmogorov complexity and high generalization capability,” Neural Networks, vol. 10, no. 5, pp. 857–873, 1997. 14
work page 1997
-
[27]
J. Schmidhuber, “POWERPLAY: Training an increasingly general problem solver by continually searching for the simplest still unsolvable problem,” arXiv preprint arXiv:1112.5309, 2013
-
[28]
J. Schmidhuber, J. Zhao, and M. Wiering, “Shifting inductive bias with success-story algorithm, adaptive Levin search, and incremental self-improvement,”Machine Learning, vol. 28, pp. 105–130, 1997
work page 1997
-
[29]
The speed prior: a new simplicity measure yielding near-optimal computable predictions,
J. Schmidhuber, “The speed prior: a new simplicity measure yielding near-optimal computable predictions,” in Proceedings of the 15th Annual Conference on Computational Learning Theory, 2002, pp. 216–228
work page 2002
-
[30]
J. Schmidhuber, “On learning to think: Algorithmic information theory for novel combinations of reinforcement learning controllers and recurrent neural world models,” arXiv preprint arXiv:1511.09249, 2015
work page Pith review arXiv 2015
-
[31]
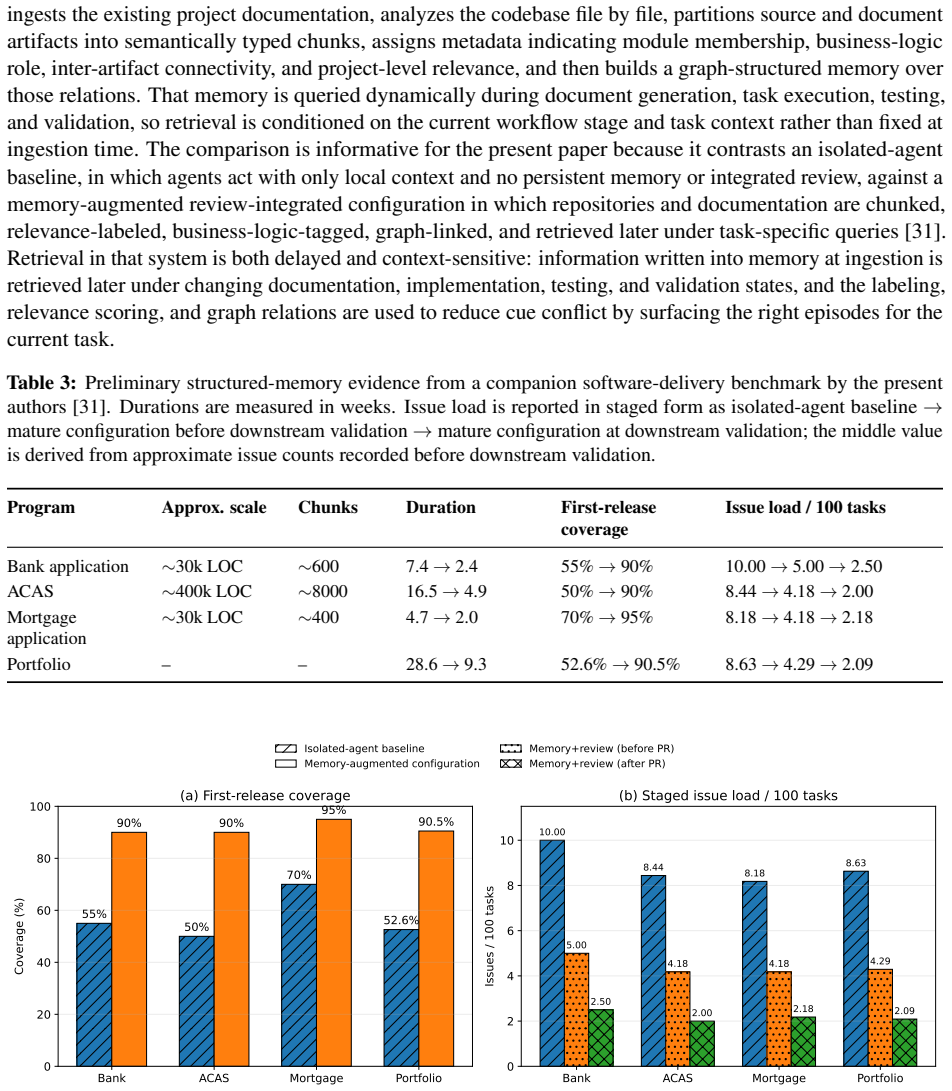
M. Armesto, and C. Kolb, “Orchestrating Human-AI Software Delivery: A Retrospective Longitudinal Field Study of Three Software Modernization Programs,” manuscript, 2026. 15
work page 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.