Recognition: 2 theorem links
· Lean TheoremBeyond Static Vision: Scene Dynamic Field Unlocks Intuitive Physics Understanding in Multi-modal Large Language Models
Pith reviewed 2026-05-14 22:08 UTC · model grok-4.3
The pith
Scene Dynamic Field uses physics simulators in fine-tuning to give multi-modal models intuitive grasp of dynamic scenes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Scene Dynamic Field augments multi-modal large language models by incorporating physics simulators inside a multi-task fine-tuning loop, allowing the models to acquire intuitive understanding of the dynamics of continuum objects that standard training leaves unlearned.
What carries the argument
Scene Dynamic Field (SDF): a concise multi-task fine-tuning framework that feeds physics-simulator outputs into the model to teach dynamic scene behavior.
If this is right
- Models achieve up to 20.7 percent higher accuracy on fluid-dynamics tasks.
- Performance improves on the new Next Frame Selection and Temporal Coherence Verification benchmarks.
- The method shows strong generalization to physical domains not seen during fine-tuning.
- A cost-efficient route opens for grounding multi-modal models in physical motion without massive new data collection.
Where Pith is reading between the lines
- The same simulator-augmented loop could be applied to robotic planning tasks that require predicting object trajectories.
- The two benchmarks could be extended to test causal reasoning or 3D spatial dynamics in future evaluations.
- If the gains persist, training pipelines for multi-modal models may shift toward hybrid simulator-plus-video regimes rather than video-only scaling.
Load-bearing premise
Performance gains on simulator-derived tasks reflect genuine intuitive physics understanding rather than overfitting to simulator-specific patterns.
What would settle it
Measure whether SDF-tuned models retain their accuracy advantage when tested on real-world video sequences of fluids or other dynamics that were never present in the simulators used for training.
Figures












read the original abstract
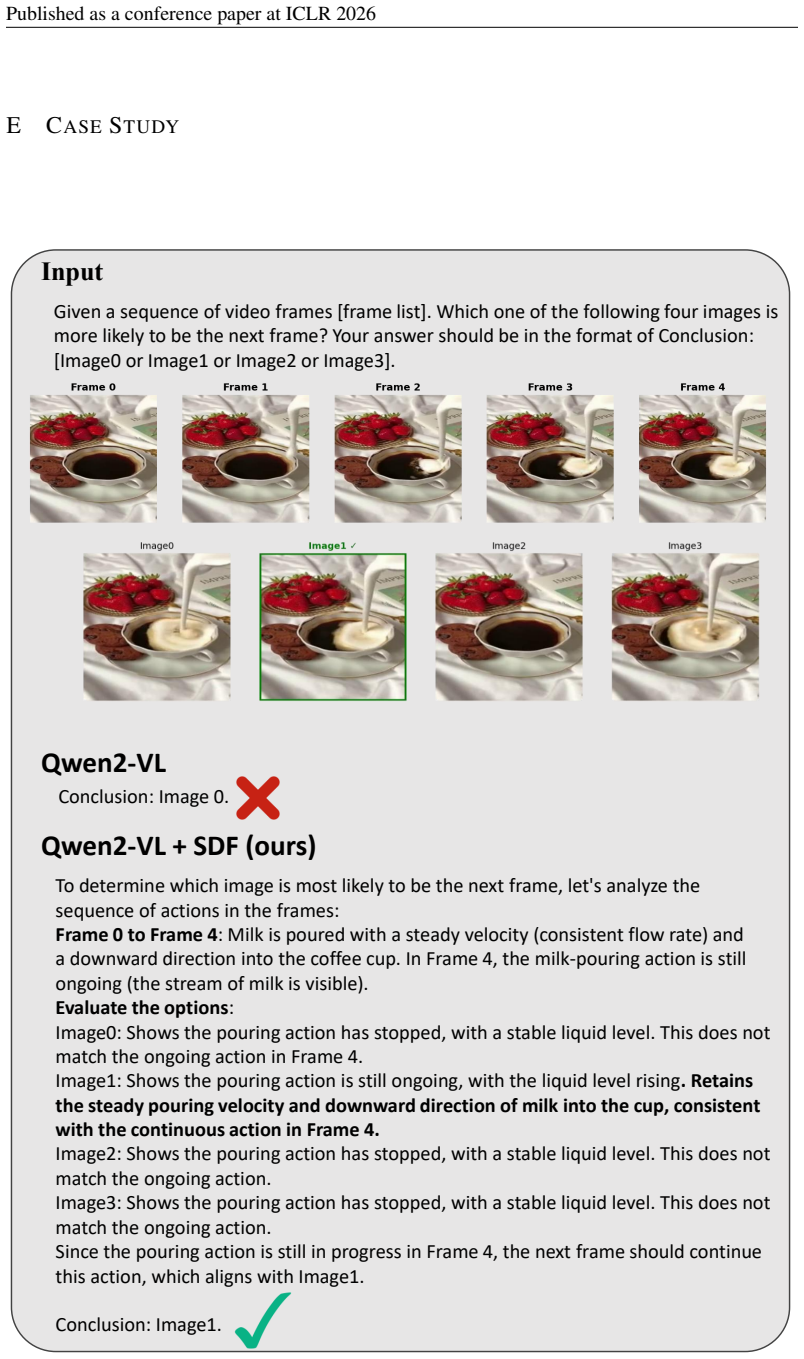
While Multimodal Large Language Models (MLLMs) have demonstrated impressive capabilities in image and video understanding, their ability to comprehend the physical world has become an increasingly important research focus. Despite their improvements, current MLLMs struggle significantly with high-level physics reasoning. In this work, we investigate the first step of physical reasoning, i.e., intuitive physics understanding, revealing substantial limitations in understanding the dynamics of continuum objects. To isolate and evaluate this specific capability, we introduce two fundamental benchmark tasks: Next Frame Selection (NFS) and Temporal Coherence Verification (TCV). Our experiments demonstrate that even state-of-the-art MLLMs perform poorly on these foundational tasks. To address this limitation, we propose Scene Dynamic Field (SDF), a concise approach that leverages physics simulators within a multi-task fine-tuning framework. SDF substantially improves performance, achieving up to 20.7% gains on fluid tasks while showing strong generalization to unseen physical domains. This work not only highlights a critical gap in current MLLMs but also presents a promising cost-efficient approach for developing more physically grounded MLLMs. Our code and data are available at https://github.com/andylinx/Scene-Dynamic-Field.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that current MLLMs struggle significantly with intuitive physics understanding, particularly the dynamics of continuum objects. It introduces two new benchmark tasks—Next Frame Selection (NFS) and Temporal Coherence Verification (TCV)—on which state-of-the-art MLLMs perform poorly. The authors propose Scene Dynamic Field (SDF), a method that incorporates physics simulators into a multi-task fine-tuning framework, reporting up to 20.7% gains on fluid tasks and strong generalization to unseen physical domains. The work positions SDF as a cost-efficient approach to develop more physically grounded MLLMs.
Significance. If the reported gains reflect genuine improvements in abstract intuitive physics understanding rather than simulator-specific pattern matching, the work would be significant. It identifies a clear gap in MLLM capabilities for dynamic physical reasoning and offers a practical simulator-based fine-tuning strategy that could be widely adopted, with implications for embodied AI, robotics, and scientific reasoning tasks.
major comments (3)
- [§5] §5 Experiments: The reported gains of up to 20.7% on fluid tasks are presented without details on the specific base MLLMs, baseline comparisons, control conditions (e.g., fine-tuning without simulator data), number of runs, variance, or statistical significance tests, which are required to substantiate the central claim that SDF produces genuine physics understanding.
- [§3] §3 Benchmarks: The NFS and TCV tasks are asserted to isolate dynamics of continuum objects without confounding factors from static vision or language, but no ablations, shortcut analyses, or controls are provided to confirm that base MLLMs cannot solve them via non-dynamic cues.
- [§5.3] §5.3 Generalization: The claim of strong generalization to unseen physical domains lacks explicit characterization of domain shifts (e.g., differences in physics parameters or rendering style between simulator training data and test sets), leaving open the possibility that gains arise from distribution matching rather than abstract understanding.
minor comments (2)
- [Abstract] The abstract should name the specific state-of-the-art MLLMs evaluated to improve reproducibility.
- [§4] Clarify the precise integration mechanism of the Scene Dynamic Field with the MLLM backbone in the method section.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and will revise the manuscript to incorporate additional details, controls, and analyses as outlined.
read point-by-point responses
-
Referee: [§5] §5 Experiments: The reported gains of up to 20.7% on fluid tasks are presented without details on the specific base MLLMs, baseline comparisons, control conditions (e.g., fine-tuning without simulator data), number of runs, variance, or statistical significance tests, which are required to substantiate the central claim that SDF produces genuine physics understanding.
Authors: We agree that additional experimental rigor is needed to substantiate the claims. The manuscript specifies the base models (Video-LLaVA and LLaVA-NeXT) and some baselines, but we will expand §5 in revision to include: fine-tuning without simulator data as an explicit control, results averaged over 3 runs with standard deviation, and paired t-tests for statistical significance. These additions will clarify that gains stem from physics-informed training rather than other factors. revision: yes
-
Referee: [§3] §3 Benchmarks: The NFS and TCV tasks are asserted to isolate dynamics of continuum objects without confounding factors from static vision or language, but no ablations, shortcut analyses, or controls are provided to confirm that base MLLMs cannot solve them via non-dynamic cues.
Authors: We acknowledge this gap in validation. While the task designs (e.g., requiring prediction of physically consistent next frames in NFS) aim to isolate dynamics, we will add ablations in the revised §3: performance on static-frame variants, temporally shuffled sequences, and language-only prompts. These will demonstrate that base MLLMs cannot solve the tasks via non-dynamic shortcuts. revision: yes
-
Referee: [§5.3] §5.3 Generalization: The claim of strong generalization to unseen physical domains lacks explicit characterization of domain shifts (e.g., differences in physics parameters or rendering style between simulator training data and test sets), leaving open the possibility that gains arise from distribution matching rather than abstract understanding.
Authors: We agree that explicit characterization strengthens the generalization claim. In the revised §5.3, we will quantify domain shifts (e.g., differences in viscosity/gravity parameters and rendering variations like lighting/texture between training simulators and test sets) and add experiments on out-of-distribution physics scenarios to support that improvements reflect abstract understanding beyond distribution matching. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper introduces two new benchmarks (NFS and TCV) to isolate intuitive physics understanding of continuum dynamics and proposes SDF as a multi-task fine-tuning method that incorporates data from external physics simulators. Performance improvements are shown empirically on held-out test splits without any equations or claims that reduce by construction to fitted parameters, self-definitions, or load-bearing self-citations. The central result relies on independent simulator-generated training data and externally defined evaluation tasks rather than renaming known patterns or smuggling ansatzes via prior work, rendering the derivation chain self-contained.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Physics simulators provide accurate and sufficient dynamic information for training intuitive physics understanding.
invented entities (1)
-
Scene Dynamic Field
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearSDF leverages physics simulators... velocity-to-color mapping... multi-task fine-tuning strategy
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclearfluid dynamics... continuum objects... Next Frame Selection (NFS) and Temporal Coherence Verification (TCV)
Reference graph
Works this paper leans on
-
[1]
" write newline "" before.all 'output.state := FUNCTION n.dashify 't := "" t empty not t #1 #1 substring "-" = t #1 #2 substring "--" = not "--" * t #2 global.max substring 't := t #1 #1 substring "-" = "-" * t #2 global.max substring 't := while if t #1 #1 substring * t #2 global.max substring 't := if while FUNCTION format.date year duplicate empty "emp...
-
[2]
\@ifxundefined[1] #1\@undefined \@firstoftwo \@secondoftwo \@ifnum[1] #1 \@firstoftwo \@secondoftwo \@ifx[1] #1 \@firstoftwo \@secondoftwo [2] @ #1 \@temptokena #2 #1 @ \@temptokena \@ifclassloaded agu2001 natbib The agu2001 class already includes natbib coding, so you should not add it explicitly Type <Return> for now, but then later remove the command n...
-
[3]
\@lbibitem[] @bibitem@first@sw\@secondoftwo \@lbibitem[#1]#2 \@extra@b@citeb \@ifundefined br@#2\@extra@b@citeb \@namedef br@#2 \@nameuse br@#2\@extra@b@citeb \@ifundefined b@#2\@extra@b@citeb @num @parse #2 @tmp #1 NAT@b@open@#2 NAT@b@shut@#2 \@ifnum @merge>\@ne @bibitem@first@sw \@firstoftwo \@ifundefined NAT@b*@#2 \@firstoftwo @num @NAT@ctr \@secondoft...
-
[4]
@open @close @open @close and [1] URL: #1 \@ifundefined chapter * \@mkboth \@ifxundefined @sectionbib * \@mkboth * \@mkboth\@gobbletwo \@ifclassloaded amsart * \@ifclassloaded amsbook * \@ifxundefined @heading @heading NAT@ctr thebibliography [1] @ \@biblabel @NAT@ctr \@bibsetup #1 @NAT@ctr @ @openbib .11em \@plus.33em \@minus.07em 4000 4000 `\.\@m @bibit...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.