Recognition: 2 theorem links
· Lean TheoremTransGP: Task-Conditioned Transformer-Guided Genetic Programming for Multitask Dynamic Flexible Job Shop Scheduling
Pith reviewed 2026-05-13 17:13 UTC · model grok-4.3
The pith
A task-conditioned Transformer guides genetic programming to evolve better heuristics for multiple dynamic job shop scheduling tasks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
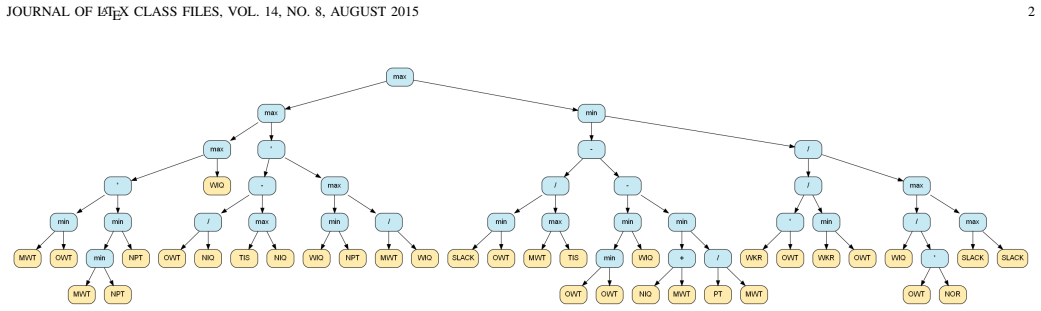
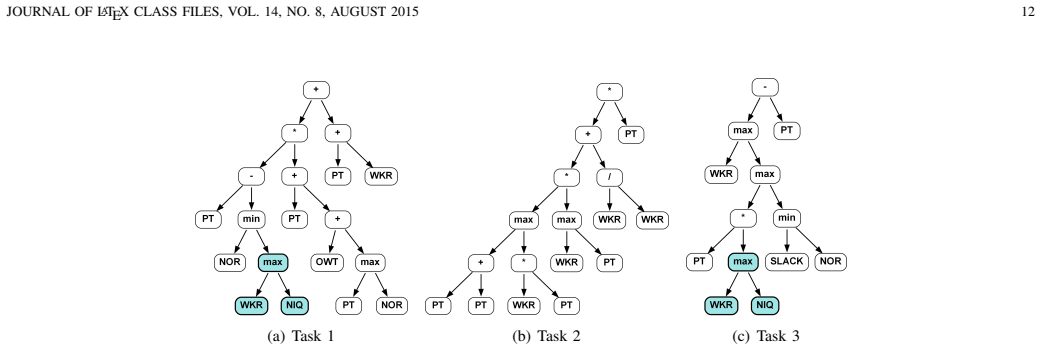
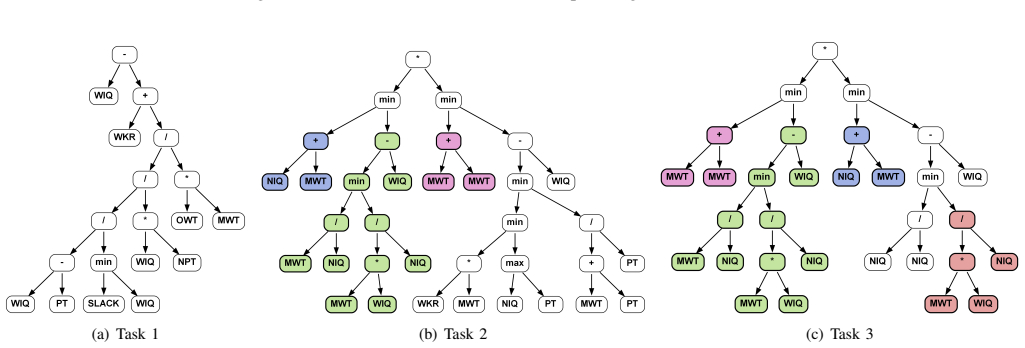
TransGP integrates a task-conditioned Transformer into the genetic programming loop so that the model both captures the distribution of elite heuristics across tasks and produces new heuristics conditioned on the specific task at hand, thereby directing the evolutionary population toward higher-quality regions of the heuristic space and enabling simultaneous optimization of multiple DFJSS instances.
What carries the argument
Task-conditioned Transformer that learns the distribution of elite GP heuristics and performs conditional generation to bias the evolutionary search toward task-specific promising structures.
If this is right
- GP populations converge in fewer generations when guided by the Transformer-generated heuristics.
- The resulting heuristics achieve lower makespan and higher robustness than both handcrafted rules and pure Transformer outputs.
- Knowledge transfers across related scheduling tasks through the shared Transformer model without explicit block swapping.
- The same evolutionary loop can handle a variable number of tasks without redesigning the fitness function or representation.
Where Pith is reading between the lines
- The same conditioning mechanism could be applied to other hyper-heuristic domains such as vehicle routing or bin packing where GP already evolves operators.
- Online deployment might allow the Transformer to be fine-tuned incrementally as new shop-floor data arrives, reducing the need for full retraining.
- The approach suggests a general template for embedding generative models inside evolutionary algorithms to shrink the effective search space.
Load-bearing premise
The Transformer can reliably learn the distribution of elite heuristics from training tasks and generate effective new heuristics for unseen tasks without overfitting or introducing search bias.
What would settle it
Train TransGP on a collection of DFJSS task instances, then test it on a fresh set of task instances drawn from the same distribution and measure whether it still shows faster convergence and lower makespan than multitask GP baselines.
Figures







read the original abstract
Hyper-heuristics have become a popular approach for solving dynamic flexible job shop scheduling (DFJSS) problems. They use gradient-free optimization techniques like Genetic Programming (GP) to evolve non-differentiable heuristics. However, conventional GP methods tend to converge slowly because they rely solely on evolutionary search to find good heuristics. Existing multitask GP methods can solve multiple tasks simultaneously and speed up the search by transferring knowledge across similar tasks. But they mostly exchange heuristic building blocks without truly generating heuristics conditioned on task information. In this paper, we aim to accelerate convergence and enable task-specific heuristic generation by incorporating a task-conditioned Transformer model. The Transformer works in two ways. First, it learns the distribution of elite heuristics, biasing the search toward promising regions of the heuristic space. Second, through conditional generation, it produces heuristics tailored to specific tasks, allowing the model to handle multiple scheduling tasks at once and improving overall optimization efficiency. Based on these ideas, we propose TransGP, a Task-Conditioned Transformer-Guided GP framework. This evolutionary paradigm integrates generative modeling with GP, enabling efficient multitask heuristic learning and knowledge transfer. We evaluate TransGP on a range of DFJSS scenarios. Experimental results show that TransGP consistently outperforms multitask GP baselines, widely used handcrafted heuristics, and the pure Transformer model, achieving faster convergence, superior solution quality, and enhanced robustness.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes TransGP, a hybrid framework that integrates a task-conditioned Transformer model with Genetic Programming (GP) for multitask dynamic flexible job shop scheduling (DFJSS). The Transformer is claimed to learn the distribution of elite heuristics to bias GP search and to perform conditional generation of task-specific heuristics, enabling knowledge transfer across tasks and yielding faster convergence, higher solution quality, and greater robustness than multitask GP baselines, handcrafted heuristics, and a pure Transformer model.
Significance. If the reported outperformance is reproducible and statistically supported, the work would offer a concrete advance in hyper-heuristic design by showing how a generative model can usefully condition evolutionary search without replacing it. The two-way use of the Transformer (distribution learning plus conditional generation) is a natural extension of existing multitask GP ideas and could generalize to other domains where heuristic spaces are large and task similarity can be exploited.
major comments (2)
- [Experimental Results] The central empirical claim (consistent outperformance with faster convergence and superior solution quality) is load-bearing for the paper's contribution, yet the abstract and description supply no information on the number of independent runs, statistical tests, baseline re-implementations, or effect-size reporting. Without these details the data-to-claim link cannot be evaluated and the result remains unverifiable.
- [Method] The description of the Transformer-GP interface (learning elite-heuristic distributions and performing conditional generation) is presented at a high level with no equations, pseudocode, or architectural diagram showing how task conditioning is injected into the GP population or fitness evaluation. This omission makes it impossible to assess whether the claimed two-way interaction is implemented without introducing harmful bias or overfitting to the training task set.
minor comments (2)
- [Abstract] The abstract states that TransGP is evaluated 'on a range of DFJSS scenarios' but does not enumerate the exact problem instances, dynamic event types, or objective functions used; this information should appear in the experimental setup section.
- [Method] Notation for the task-conditioning mechanism and the elite-heuristic distribution is introduced without a clear table or figure summarizing the input/output shapes or the loss functions employed for Transformer training.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. We address each major comment below and will revise the manuscript accordingly to improve clarity and verifiability.
read point-by-point responses
-
Referee: [Experimental Results] The central empirical claim (consistent outperformance with faster convergence and superior solution quality) is load-bearing for the paper's contribution, yet the abstract and description supply no information on the number of independent runs, statistical tests, baseline re-implementations, or effect-size reporting. Without these details the data-to-claim link cannot be evaluated and the result remains unverifiable.
Authors: We agree that the abstract and high-level description do not provide these experimental details. In the revised manuscript we will explicitly report the number of independent runs (30 per scenario), the statistical tests employed (Wilcoxon rank-sum test with Holm-Bonferroni correction at p < 0.05), confirmation that baselines were re-implemented from the original sources, and effect-size reporting (Cohen's d). These additions will be placed in both the abstract and the experimental results section to make the empirical claims fully verifiable. revision: yes
-
Referee: [Method] The description of the Transformer-GP interface (learning elite-heuristic distributions and performing conditional generation) is presented at a high level with no equations, pseudocode, or architectural diagram showing how task conditioning is injected into the GP population or fitness evaluation. This omission makes it impossible to assess whether the claimed two-way interaction is implemented without introducing harmful bias or overfitting to the training task set.
Authors: We acknowledge that the current presentation of the Transformer-GP interface is high-level. In the revision we will add: (i) the mathematical formulation of task-conditioned attention and the loss used to learn the elite-heuristic distribution, (ii) pseudocode for the full TransGP loop including how task embeddings condition both the Transformer generator and the GP population initialization/fitness, and (iii) an architectural diagram illustrating the data flow. These additions will allow readers to evaluate the precise mechanism of the two-way interaction and any risk of bias or overfitting. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper presents TransGP as an empirical hybrid evolutionary framework that integrates a task-conditioned Transformer for distribution learning and conditional heuristic generation with standard GP search. No equations, derivations, or self-referential definitions appear in the abstract or description that would reduce claimed performance gains to fitted parameters by construction, self-citation chains, or renamed inputs. The central claims rest on experimental comparisons against baselines, which are independent of any internal reduction to the method's own outputs. This is a standard empirical proposal with no load-bearing circular steps.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The Transformer works in two ways. First, it learns the distribution of elite heuristics... Second, through conditional generation, it produces heuristics tailored to specific tasks
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We propose TransGP, a Task-Conditioned Transformer-Guided GP framework
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
A two- individual based evolutionary algorithm for the flexible job shop schedul- ing problem,
J. Ding, Z. Lü, C.-M. Li, L. Shen, L. Xu, and F. Glover, “A two- individual based evolutionary algorithm for the flexible job shop schedul- ing problem,” inProceedings of the AAAI conference on Artificial Intelligence, vol. 33, no. 01, 2019, pp. 2262–2271
work page 2019
-
[2]
M. Xu, Y . Mei, F. Zhang, and M. Zhang, “Genetic programming for dynamic flexible job shop scheduling: Evolution with single individu- als and ensembles,”IEEE Transactions on Evolutionary Computation, vol. 28, no. 6, pp. 1761–1775, 2023
work page 2023
-
[3]
M. Ðurasevi ´c and D. Jakobovi ´c, “Heuristic and metaheuristic methods for the parallel unrelated machines scheduling problem: a survey,” Artificial Intelligence Review, vol. 56, no. 4, pp. 3181–3289, 2023
work page 2023
-
[4]
Self-labeling the job shop scheduling problem,
A. Corsini, A. Porrello, S. Calderara, and M. Dell’Amico, “Self-labeling the job shop scheduling problem,”Proceedings of the Advances in Neural Information Processing Systems, vol. 37, pp. 105 528–105 551, 2024
work page 2024
-
[5]
A bi-level framework for learning to solve combinato- rial optimization on graphs,
R. Wang, Z. Hua, G. Liu, J. Zhang, J. Yan, F. Qi, S. Yang, J. Zhou, and X. Yang, “A bi-level framework for learning to solve combinato- rial optimization on graphs,”Proceedings of the Advances in Neural Information Processing Systems, vol. 34, pp. 21 453–21 466, 2021
work page 2021
-
[6]
M. Xu, Y . Mei, F. Zhang, and M. Zhang, “Learn to optimise for job shop scheduling: a survey with comparison between genetic programming and reinforcement learning,”Artificial Intelligence Review, vol. 58, no. 6, pp. 1–53, 2025
work page 2025
-
[7]
W. Yi, N. Chen, Y . Chen, and Z. Pei, “An improved deep q-network for dynamic flexible job shop scheduling with limited maintenance re- sources,”International Journal of Production Research, vol. 63, no. 23, pp. 9112–9133, 2025
work page 2025
-
[8]
Quality diversity genetic programming for learning scheduling heuristics,
M. Xu, F. Neumann, A. Neumann, and Y . S. Ong, “Quality diversity genetic programming for learning scheduling heuristics,” inProceedings of the Genetic and Evolutionary Computation Conference, 2025, pp. 1090–1098
work page 2025
-
[9]
Explainable artifi- cial intelligence by genetic programming: A survey,
Y . Mei, Q. Chen, A. Lensen, B. Xue, and M. Zhang, “Explainable artifi- cial intelligence by genetic programming: A survey,”IEEE Transactions on Evolutionary Computation, vol. 27, no. 3, pp. 621–641, 2022
work page 2022
-
[10]
Multifactorial genetic programming for symbolic regression problems,
J. Zhong, L. Feng, W. Cai, and Y .-S. Ong, “Multifactorial genetic programming for symbolic regression problems,”IEEE transactions on systems, man, and cybernetics: systems, vol. 50, no. 11, pp. 4492–4505, 2018
work page 2018
-
[11]
Y . Zhou, J. Yang, and Z. Huang, “Automatic design of scheduling policies for dynamic flexible job shop scheduling via surrogate-assisted cooperative co-evolution genetic programming,”International Journal of Production Research, vol. 58, no. 9, pp. 2561–2580, 2020
work page 2020
-
[12]
Generative model for decision trees,
R. Guidotti, A. Monreale, M. Setzu, and G. V olpi, “Generative model for decision trees,” inProceedings of the AAAI Conference on Artificial Intelligence, vol. 38, no. 19, 2024, pp. 21 116–21 124
work page 2024
-
[13]
Llm-driven instance-specific heuristic generation and selection,
S. Zhang, S. Liu, N. Lu, J. Wu, J. Liu, Y .-S. Ong, and K. Tang, “Llm-driven instance-specific heuristic generation and selection,”arXiv preprint arXiv:2506.00490, 2025
-
[14]
C. Luo, X. Li, L. Gao, Q. Liu, and Q. Fan, “A knowledge-enhanced evo- lutionary multitasking memetic algorithm for multimodal multiobjective flexible job shop scheduling considering speed,”IEEE Transactions on Cybernetics, 2026
work page 2026
-
[15]
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, Ł. Kaiser, and I. Polosukhin, “Attention is all you need,”Proceedings of the Advances in Neural Information Processing Systems, vol. 30, 2017
work page internal anchor Pith review 2017
-
[16]
Review of job shop scheduling research and its new perspectives under industry 4.0,
J. Zhang, G. Ding, Y . Zou, S. Qin, and J. Fu, “Review of job shop scheduling research and its new perspectives under industry 4.0,”Journal of intelligent manufacturing, vol. 30, no. 4, pp. 1809–1830, 2019
work page 2019
-
[17]
K. Lei, P. Guo, Y . Wang, J. Zhang, X. Meng, and L. Qian, “Large- scale dynamic scheduling for flexible job-shop with random arrivals of new jobs by hierarchical reinforcement learning,”IEEE Transactions on Industrial Informatics, vol. 20, no. 1, pp. 1007–1018, 2023
work page 2023
-
[18]
X. Chen, J. Li, Z. Wang, Q. Chen, K. Gao, and Q. Pan, “Optimizing dynamic flexible job shop scheduling using an evolutionary multi-task optimization framework and genetic programming,”IEEE Transactions on Evolutionary Computation, 2025
work page 2025
-
[19]
Task relatedness-based multitask genetic programming for dynamic flexible job shop scheduling,
F. Zhang, Y . Mei, S. Nguyen, K. C. Tan, and M. Zhang, “Task relatedness-based multitask genetic programming for dynamic flexible job shop scheduling,”IEEE Transactions on Evolutionary Computation, vol. 27, no. 6, pp. 1705–1719, 2022. JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 14
work page 2022
-
[20]
J. Chen, Y . Jia, Y . Bi, and W. Chen, “Generate a single heuristic for multiple dynamic flexible job shop scheduling tasks by genetic programming,” inProceedings of the IEEE Congress on Evolutionary Computation. IEEE, 2024, pp. 1–8
work page 2024
-
[21]
Surrogate-assisted mul- titask genetic programming for learning scheduling heuristics,
F. Zhang, S. Nguyen, Y . Mei, and M. Zhang, “Surrogate-assisted mul- titask genetic programming for learning scheduling heuristics,”Genetic Programming for Production Scheduling: An Evolutionary Learning Approach, pp. 291–311, 2021
work page 2021
-
[22]
A comparative study of dispatching rules in dynamic flowshops and jobshops,
C. Rajendran and O. Holthaus, “A comparative study of dispatching rules in dynamic flowshops and jobshops,”European journal of operational research, vol. 116, no. 1, pp. 156–170, 1999
work page 1999
-
[23]
A. Teymourifar, J. Li, D. Li, and T. Zheng, “A comparison between linear and non-linear combinations of priority rules for solving flexible job shop scheduling problem,” inGlobal Joint Conference on Industrial Engineering and Its Application Areas. Springer, 2022, pp. 105–117
work page 2022
-
[24]
A flexible dispatching rule for minimizing tardiness in job shop scheduling,
B. Chen and T. I. Matis, “A flexible dispatching rule for minimizing tardiness in job shop scheduling,”International Journal of Production Economics, vol. 141, no. 1, pp. 360–365, 2013
work page 2013
-
[25]
R. Braune, F. Benda, K. F. Doerner, and R. F. Hartl, “A genetic program- ming learning approach to generate dispatching rules for flexible shop scheduling problems,”International Journal of Production Economics, vol. 243, p. 108342, 2022
work page 2022
-
[26]
Y . Zeiträg, J. Rui Figueira, and G. Figueira, “A cooperative coevo- lutionary hyper-heuristic approach to solve lot-sizing and job shop scheduling problems using genetic programming,”International Journal of Production Research, vol. 62, no. 16, pp. 5850–5877, 2024
work page 2024
-
[27]
Automatic design of dispatching rules with genetic programming for dynamic job shop scheduling,
S. Shady, T. Kaihara, N. Fujii, and D. Kokuryo, “Automatic design of dispatching rules with genetic programming for dynamic job shop scheduling,” inProceedings of the International Conference on Ad- vances in Production Management Systems. Springer, 2020, pp. 399– 407
work page 2020
-
[28]
J. R. Koza,Genetic programming III: Darwinian invention and problem solving. Morgan Kaufmann, 1999, vol. 3
work page 1999
-
[29]
S. Shady, T. Kaihara, N. Fujii, and D. Kokuryo, “A novel feature selec- tion for evolving compact dispatching rules using genetic programming for dynamic job shop scheduling,”International Journal of Production Research, vol. 60, no. 13, pp. 4025–4048, 2022
work page 2022
-
[30]
S. Nguyen, M. Zhang, M. Johnston, and K. C. Tan, “A computational study of representations in genetic programming to evolve dispatching rules for the job shop scheduling problem,”IEEE Transactions on Evolutionary Computation, vol. 17, no. 5, pp. 621–639, 2012
work page 2012
-
[31]
H. Guo, J. Liu, Y . Wang, and C. Zhuang, “An improved genetic pro- gramming hyper-heuristic for the dynamic flexible job shop scheduling problem with reconfigurable manufacturing cells,”Journal of Manufac- turing Systems, vol. 74, pp. 252–263, 2024
work page 2024
-
[32]
Multifactorial evolution: Toward evolutionary multitasking,
A. Gupta, Y .-S. Ong, and L. Feng, “Multifactorial evolution: Toward evolutionary multitasking,”IEEE Transactions on Evolutionary Compu- tation, vol. 20, no. 3, pp. 343–357, 2015
work page 2015
-
[33]
Learning to dispatch for job shop scheduling via deep reinforcement learning,
C. Zhang, W. Song, Z. Cao, J. Zhang, P. S. Tan, and X. Chi, “Learning to dispatch for job shop scheduling via deep reinforcement learning,” Proceedings of the Advances in Neural Information Processing Dystems, vol. 33, pp. 1621–1632, 2020
work page 2020
-
[34]
Deep reinforcement learning guided improvement heuristic for job shop scheduling,
C. Zhang, Z. Cao, W. Song, Y . Wu, and J. Zhang, “Deep reinforcement learning guided improvement heuristic for job shop scheduling,” inPro- ceedings of the International Conference on Learning Representations, 2024
work page 2024
-
[35]
Fast approximations for job shop scheduling: A lagrangian dual deep learning method,
J. Kotary, F. Fioretto, and P. Van Hentenryck, “Fast approximations for job shop scheduling: A lagrangian dual deep learning method,” in Proceedings of the AAAI Conference on Artificial Intelligence, vol. 36, no. 7, 2022, pp. 7239–7246
work page 2022
-
[36]
X. Chen, R. Qu, J. Dong, R. Bai, and Y . Jin, “Genetic programming with reinforcement learning trained transformer for real-world dynamic scheduling problems,”arXiv preprint arXiv:2504.07779, 2025
-
[37]
Mathematical discoveries from program search with large language models,
B. Romera-Paredes, M. Barekatain, A. Novikov, M. Balog, M. P. Kumar, E. Dupont, F. J. Ruiz, J. S. Ellenberg, P. Wang, O. Fawziet al., “Mathematical discoveries from program search with large language models,”Nature, vol. 625, no. 7995, pp. 468–475, 2024
work page 2024
-
[38]
Evolution of heuristics: Towards efficient automatic algorithm design using large language model,
F. Liu, X. Tong, M. Yuan, X. Lin, F. Luo, Z. Wang, Z. Lu, and Q. Zhang, “Evolution of heuristics: Towards efficient automatic algorithm design using large language model,”arXiv preprint arXiv:2401.02051, 2024
-
[39]
P. V . T. Dat, L. Doan, and H. T. T. Binh, “Hsevo: Elevating automatic heuristic design with diversity-driven harmony search and genetic algo- rithm using llms,” inProceedings of the AAAI Conference on Artificial Intelligence, vol. 39, no. 25, 2025, pp. 26 931–26 938
work page 2025
-
[40]
AlphaEvolve: A coding agent for scientific and algorithmic discovery
A. Novikov, N. V ˜u, M. Eisenberger, E. Dupont, P.-S. Huang, A. Z. Wagner, S. Shirobokov, B. Kozlovskii, F. J. Ruiz, A. Mehrabianet al., “Alphaevolve: A coding agent for scientific and algorithmic discovery,” arXiv preprint arXiv:2506.13131, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[41]
Reevo: Large language models as hyper-heuristics with reflective evolution,
H. Ye, J. Wang, Z. Cao, F. Berto, C. Hua, H. Kim, J. Park, and G. Song, “Reevo: Large language models as hyper-heuristics with reflective evolution,”Advances in neural information processing systems, vol. 37, pp. 43 571–43 608, 2024
work page 2024
-
[42]
N. Tao, A. Ventresque, and T. Saber, “Program synthesis with genera- tive pre-trained transformers and grammar-guided genetic programming grammar,” inProceedings of the IEEE Latin American Conference on Computational Intelligence. IEEE, 2023, pp. 1–6
work page 2023
-
[43]
Measuring systematic gen- eralization in neural proof generation with transformers,
N. Gontier, K. Sinha, S. Reddy, and C. Pal, “Measuring systematic gen- eralization in neural proof generation with transformers,”Proceedings of the Advances in Neural Information Processing Systems, vol. 33, pp. 22 231–22 242, 2020
work page 2020
-
[44]
Molgpt: molecular generation using a transformer-decoder model,
V . Bagal, R. Aggarwal, P. Vinod, and U. D. Priyakumar, “Molgpt: molecular generation using a transformer-decoder model,”Journal of chemical information and modeling, vol. 62, no. 9, pp. 2064–2076, 2021
work page 2064
-
[45]
K. Han, A. Xiao, E. Wu, J. Guo, C. Xu, and Y . Wang, “Transformer in transformer,”Proceedings of the Advances in Neural Information Processing Systems, vol. 34, pp. 15 908–15 919, 2021
work page 2021
-
[46]
T. Hildebrandt, J. Heger, and B. Scholz Reiter, “Towards improved dispatching rules for complex shop floor scenarios: a genetic program- ming approach,” inProceedings of the Conference on Genetic and Evolutionary Computation, 2010, pp. 257–264
work page 2010
-
[47]
Adaptive scheduling on unrelated machines with genetic programming,
M. Ðurasevi ´c, D. Jakobovi ´c, and K. Kneževi ´c, “Adaptive scheduling on unrelated machines with genetic programming,”Applied Soft Computing, vol. 48, pp. 419–430, 2016
work page 2016
-
[48]
F. Zhang, Y . Mei, S. Nguyen, and M. Zhang, “Survey on genetic programming and machine learning techniques for heuristic design in job shop scheduling,”IEEE Transactions on Evolutionary Computation, vol. 28, no. 1, pp. 147–167, 2023
work page 2023
-
[49]
Incorporation of clustering effects for the wilcoxon rank sum test: a large-sample approach,
B. Rosner, R. J. Glynn, and M.-L. Ting Lee, “Incorporation of clustering effects for the wilcoxon rank sum test: a large-sample approach,” Biometrics, vol. 59, no. 4, pp. 1089–1098, 2003
work page 2003
-
[50]
Using of jaccard coefficient for keywords similarity,
S. Niwattanakul, J. Singthongchai, E. Naenudorn, and S. Wanapu, “Using of jaccard coefficient for keywords similarity,” inProceedings of the international multiconference of engineers and computer scientists, vol. 1, no. 6, 2013, pp. 380–384
work page 2013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.