Recognition: no theorem link
Finite-Step Invariant Sets for Hybrid Systems with Probabilistic Guarantees
Pith reviewed 2026-05-10 18:53 UTC · model grok-4.3
The pith
A sampling-based optimization framework computes finite-step invariant ellipsoids around periodic orbits in hybrid systems with probabilistic guarantees.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
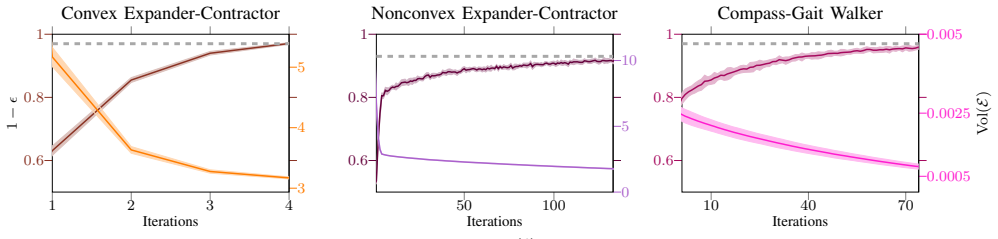
We propose an algorithmic framework leveraging sampling-based optimization to compute a finite-step invariant ellipsoid around a nominal periodic orbit using sampled evaluations of the return map. The resulting solution is accompanied by probabilistic guarantees on finite-step invariance satisfying a user-defined accuracy threshold.
What carries the argument
The finite-step invariant ellipsoid obtained through sampling-based optimization on the Poincare return map evaluations.
If this is right
- Robustness analysis becomes possible for periodic orbits in simulation-only hybrid systems.
- Probabilistic guarantees can be tailored to a user-defined accuracy threshold.
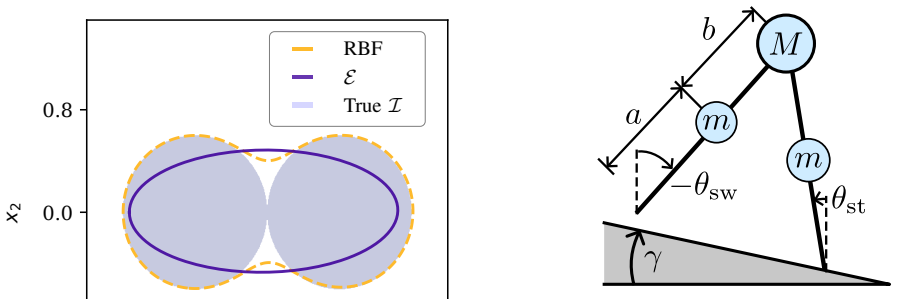
- The method works for both low-dimensional systems and more complex models like compass-gait walkers.
- Invariant sets can be found without closed-form system equations.
Where Pith is reading between the lines
- Similar sampling optimization could be applied to other stability or safety properties in hybrid systems.
- The approach suggests a path toward certifying periodic behaviors in real-world cyber-physical systems with limited model knowledge.
- Extensions might include incorporating explicit disturbance models into the sampling process.
Load-bearing premise
That sampled evaluations of the return map via forward simulation are sufficient to certify finite-step invariance with the stated probabilistic guarantees, without hidden assumptions on the distribution of disturbances or the convexity of the ellipsoid.
What would settle it
Simulations revealing that the actual probability of leaving the ellipsoid after the finite steps is higher than the guaranteed threshold for the chosen accuracy.
Figures




read the original abstract
Poincare return maps are a fundamental tool for analyzing periodic orbits in hybrid dynamical systems, including legged locomotion, power electronics, and other cyber-physical systems with switching behavior. The Poincare return map captures the evolution of the hybrid system on a guard surface, reducing the stability analysis of a periodic orbit to that of a discrete-time system. While linearization provides local stability information, assessing robustness to disturbances requires identifying invariant sets of the state space under the return dynamics. However, computing such invariant sets is computationally difficult, especially when system dynamics are only available through forward simulation. In this work, we propose an algorithmic framework leveraging sampling-based optimization to compute a finite-step invariant ellipsoid around a nominal periodic orbit using sampled evaluations of the return map. The resulting solution is accompanied by probabilistic guarantees on finite-step invariance satisfying a user-defined accuracy threshold. We demonstrate the approach on two low-dimensional systems and a compass-gait walking model.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an algorithmic framework that uses sampling-based optimization to compute finite-step invariant ellipsoids around nominal periodic orbits of hybrid systems, based on sampled evaluations of the Poincaré return map. The resulting ellipsoids come with probabilistic guarantees of finite-step invariance that meet a user-specified accuracy threshold. The approach is illustrated on two low-dimensional examples and a compass-gait biped model.
Significance. If the sampling-to-guarantee step is rigorously justified, the method would supply a practical, simulation-driven route to certified robustness margins for hybrid periodic orbits when closed-form dynamics are unavailable. This is relevant to legged locomotion and switched power systems, where traditional invariant-set algorithms scale poorly.
major comments (3)
- [§3.2, Theorem 1] §3.2 and Theorem 1: The probabilistic certificate is stated to hold for the continuous return map, yet the argument relies on uniform sampling without an explicit covering radius, Lipschitz constant of the return map, or concentration inequality that propagates the finite-sample guarantee to the entire ellipsoid. Without these, the invariance statement reduces to an empirical observation on the observed trajectories.
- [Algorithm 1] Algorithm 1, step 4: The finite-step composition of the return map is optimized directly on samples, but no error bound is derived for the composition of the probabilistic certificates across multiple steps; the user-defined accuracy threshold appears only as a post-hoc filter rather than being propagated through the optimization.
- [§4.3] §4.3 (compass-gait example): The reported success probability is computed from the same sample set used for optimization; an independent validation set or out-of-sample Monte-Carlo test with quantified coverage is not provided, leaving open whether the guarantee generalizes beyond the training samples.
minor comments (2)
- [§2] Notation for the ellipsoid parameters (center, shape matrix) is introduced inconsistently between the abstract and §2; a single consistent definition would improve readability.
- [Figure 3] Figure 3 caption does not state the number of samples or the exact accuracy threshold used, making it difficult to reproduce the plotted invariant set.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. These points help clarify the presentation of the probabilistic guarantees and validation procedures. We address each major comment below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [§3.2, Theorem 1] The probabilistic certificate is stated to hold for the continuous return map, yet the argument relies on uniform sampling without an explicit covering radius, Lipschitz constant of the return map, or concentration inequality that propagates the finite-sample guarantee to the entire ellipsoid. Without these, the invariance statement reduces to an empirical observation on the observed trajectories.
Authors: We agree that Theorem 1 would benefit from an explicit argument bridging the finite samples to the continuous ellipsoid. In the revision we will add a covering-radius argument that invokes the local Lipschitz continuity of the return map (which holds in a neighborhood of the periodic orbit) together with a concentration inequality (e.g., Hoeffding) to obtain a rigorous high-probability bound that applies uniformly over the ellipsoid. This will make the continuous-domain guarantee explicit rather than implicit. revision: yes
-
Referee: [Algorithm 1] Algorithm 1, step 4: The finite-step composition of the return map is optimized directly on samples, but no error bound is derived for the composition of the probabilistic certificates across multiple steps; the user-defined accuracy threshold appears only as a post-hoc filter rather than being propagated through the optimization.
Authors: The present formulation applies the per-step threshold independently and invokes a union bound over the finite number of steps. We acknowledge that a tighter propagation of the error through the composition would be preferable. The revised manuscript will derive an accumulated-error bound that uses the Lipschitz constants of the successive return-map compositions and will incorporate the user-specified accuracy threshold directly into the optimization rather than applying it only as a post-hoc filter. revision: yes
-
Referee: [§4.3] §4.3 (compass-gait example): The reported success probability is computed from the same sample set used for optimization; an independent validation set or out-of-sample Monte-Carlo test with quantified coverage is not provided, leaving open whether the guarantee generalizes beyond the training samples.
Authors: We recognize that reporting the success probability on the optimization samples alone weakens the empirical validation in §4.3. The revised version will add an independent validation set of Monte-Carlo trajectories drawn from the same distribution but not used during optimization, together with explicit coverage statistics and success-rate figures on this held-out set to demonstrate generalization of the probabilistic guarantee. revision: yes
Circularity Check
No circularity: sampling-based optimization uses external evaluations and statistical guarantees
full rationale
The paper's core contribution is an algorithmic framework that takes sampled forward simulations of the Poincaré return map as input to a sampling-based optimizer, producing a finite-step invariant ellipsoid with user-specified probabilistic guarantees. This chain is self-contained against external benchmarks: the samples are generated by simulation (independent of the ellipsoid), the optimization is a standard procedure, and the probabilistic certificates rely on concentration inequalities or similar external statistical results rather than any self-referential fit, definition, or self-citation that reduces the claim to its own inputs. No load-bearing step equates a prediction to a fitted parameter or imports uniqueness via author overlap. The derivation therefore does not collapse by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Existence and computability of Poincare return map via forward simulation for the hybrid system
Reference graph
Works this paper leans on
-
[1]
Grasp gaits for planar object manipulation,
S. R. Leveroni, “Grasp gaits for planar object manipulation,” Ph.D. dissertation, Massachusetts Institute of Technology, 1997
1997
-
[2]
Dextrous manipulation by rolling and finger gaiting,
L. Han and J. C. Trinkle, “Dextrous manipulation by rolling and finger gaiting,” inProceedings. 1998 IEEE International Conference on Robotics and Automation (Cat. No. 98CH36146), vol. 1, 1998, pp. 730–735
1998
-
[3]
Direct collocation for dynamic behaviors with nonprehensile contacts: Ap- plication to flipping burgers,
S. Kolathaya, W. Guffey, R. W. Sinnet, and A. D. Ames, “Direct collocation for dynamic behaviors with nonprehensile contacts: Ap- plication to flipping burgers,”IEEE Robotics and Automation Letters, vol. 3, no. 4, pp. 3677–3684, 2018
2018
-
[4]
Stability of hybrid system limit cycles: Application to the compass gait biped robot,
I. A. Hiskens, “Stability of hybrid system limit cycles: Application to the compass gait biped robot,” inProceedings of the 40th IEEE Conference on Decision and Control (Cat. No. 01CH37228), vol. 1, 2001, pp. 774–779
2001
-
[5]
Realizing dynamic and efficient bipedal locomotion on the humanoid robot durus,
J. Reher, E. A. Cousineau, A. Hereid, C. M. Hubicki, and A. D. Ames, “Realizing dynamic and efficient bipedal locomotion on the humanoid robot durus,” in2016 IEEE International Conference on Robotics and Automation (ICRA), 2016, pp. 1794–1801
2016
-
[6]
E. R. Westervelt, J. W. Grizzle, C. Chevallereau, J. H. Choi, and B. Morris,Feedback control of dynamic bipedal robot locomotion. CRC press, 2018
2018
-
[7]
Dynamic walking: Toward agile and efficient bipedal robots,
J. Reher and A. D. Ames, “Dynamic walking: Toward agile and efficient bipedal robots,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 4, pp. 535–572, 2021
2021
-
[8]
I. R. Epstein and J. A. Pojman,An introduction to nonlinear chemical dynamics: oscillations, waves, patterns, and chaos. Oxford university press, 1998
1998
-
[9]
Maximizing average throughput in oscillatory biochemical synthesis systems: an optimal control approach,
M. Ali Al-Radhawi, M. Margaliot, and E. D. Sontag, “Maximizing average throughput in oscillatory biochemical synthesis systems: an optimal control approach,”Royal Society open science, vol. 8, no. 9, p. 210878, 2021
2021
-
[10]
Traffic circles and timing of traffic lights for cars flow,
Y . Chitour and B. Piccoli, “Traffic circles and timing of traffic lights for cars flow,”Discrete and Continuous Dynamical Systems Series B, vol. 5, no. 3, p. 599, 2005
2005
-
[11]
A compartmental model for traffic networks and its dynamical behavior,
S. Coogan and M. Arcak, “A compartmental model for traffic networks and its dynamical behavior,”IEEE Transactions on Automatic Control, vol. 60, no. 10, pp. 2698–2703, 2015
2015
-
[12]
Hybrid zero dynamics of planar bipedal walking,
J. W. Grizzle and E. R. Westervelt, “Hybrid zero dynamics of planar bipedal walking,” inAnalysis and Design of Nonlinear Control Systems: In Honor of Alberto Isidori. Springer, 2008, pp. 223–237
2008
-
[13]
First steps towards translating HZD control of bipedal robots to decentralized control of exoskeletons,
A. Agrawal, O. Harib, A. Hereid, S. Finet, M. Masselin, L. Praly, A. D. Ames, K. Sreenath, and J. W. Grizzle, “First steps towards translating HZD control of bipedal robots to decentralized control of exoskeletons,”IEEE Access, vol. 5, pp. 9919–9934, 2017
2017
-
[14]
Input-to-state stability of periodic orbits of systems with impulse effects via poincar ´e analysis,
S. Veer, I. Poulakakiset al., “Input-to-state stability of periodic orbits of systems with impulse effects via poincar ´e analysis,”IEEE Transactions on Automatic Control, vol. 64, no. 11, pp. 4583–4598, 2019
2019
-
[15]
On the existence and uniqueness of Poincar´e maps for systems with impulse effects,
J. R. Goodman and L. J. Colombo, “On the existence and uniqueness of Poincar´e maps for systems with impulse effects,”IEEE Transactions on Automatic Control, vol. 65, no. 4, pp. 1815–1821, 2019
2019
-
[16]
Zero dynamics, pendulum models, and angular momentum in feedback control of bipedal locomotion,
Y . Gong and J. W. Grizzle, “Zero dynamics, pendulum models, and angular momentum in feedback control of bipedal locomotion,” Journal of Dynamic Systems, Measurement, and Control, vol. 144, no. 12, p. 121006, 2022
2022
-
[17]
Synthesizing robust walking gaits via discrete-time barrier functions with application to multi-contact exoskeleton locomotion,
M. Tucker, K. Li, and A. D. Ames, “Synthesizing robust walking gaits via discrete-time barrier functions with application to multi-contact exoskeleton locomotion,” in2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 1136–1142
2024
-
[18]
Sample-path optimization of convex stochastic performance functions,
E. L. Plambeck, B.-R. Fu, S. M. Robinson, and R. Suri, “Sample-path optimization of convex stochastic performance functions,”Mathemat- ical Programming, vol. 75, no. 2, pp. 137–176, 1996
1996
-
[19]
R. Y . Rubinstein and D. P. Kroese,Simulation and the Monte Carlo Method, 3rd ed. John Wiley & Sons, 2016
2016
-
[20]
Tutorial on Practical Prediction Theory for Classifica- tion,
J. Langford, “Tutorial on Practical Prediction Theory for Classifica- tion,”Journal of Machine Learning Research, vol. 6, pp. 273–306, 2005
2005
-
[21]
Hardt and B
M. Hardt and B. Recht,Patterns, predictions, and actions: Foundations of machine learning. Princeton University Press, 2022
2022
-
[22]
A theory of the learnable,
L. G. Valiant, “A theory of the learnable,”Commun. ACM, vol. 27, no. 11, p. 1134–1142, 1984
1984
-
[23]
Computation of Minimum-V olume Cov- ering Ellipsoids,
P. Sun and R. M. Freund, “Computation of Minimum-V olume Cov- ering Ellipsoids,”Operations Research, vol. 52, no. 5, pp. 690–706, 2004
2004
-
[24]
Regions of Attraction for Hybrid Limit Cycles of Walking Robots,
I. R. Manchester, M. M. Tobenkin, M. Levashov, and R. Tedrake, “Regions of Attraction for Hybrid Limit Cycles of Walking Robots,” arXiv:1010.2247, 2010
-
[25]
A Study of the Passive Gait of a Compass-Like Biped Robot: Symmetry and Chaos,
A. Goswami, B. Thuilot, and B. Espiau, “A Study of the Passive Gait of a Compass-Like Biped Robot: Symmetry and Chaos,”The International Journal of Robotics Research, vol. 17, no. 12, pp. 1282– 1301, 1998
1998
-
[26]
Computation of Regions of Attraction for Hybrid Limit Cycles Using Reachability: An Application to Walking Robots,
J. J. Choi, A. Agrawal, K. Sreenath, C. J. Tomlin, and S. Bansal, “Computation of Regions of Attraction for Hybrid Limit Cycles Using Reachability: An Application to Walking Robots,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 4504–4511, 2022
2022
-
[27]
On Neural Differential Equations,
P. Kidger, “On Neural Differential Equations,” Ph.D. dissertation, University of Oxford, 2021
2021
-
[28]
JAX: composable transformations of Python+NumPy programs,
J. Bradbury, R. Frostig, P. Hawkins, M. J. Johnson, C. Leary, D. Maclaurin, G. Necula, A. Paszke, J. VanderPlas, S. Wanderman- Milne, and Q. Zhang, “JAX: composable transformations of Python+NumPy programs,” 2018. [Online]. Available: http://github. com/jax-ml/jax
2018
-
[29]
Bullo,Contraction theory for dynamical systems
F. Bullo,Contraction theory for dynamical systems. Francesco Bullo, 2022
2022
-
[30]
Lyapunov Theory for Discrete Time Systems,
N. Bof, R. Carli, and L. Schenato, “Lyapunov Theory for Discrete Time Systems,”arXiv:1809.05289, 2018
-
[31]
Brax - A Differentiable Physics Engine for Large Scale Rigid Body Simulation,
C. D. Freeman, E. Frey, A. Raichuk, S. Girgin, I. Mordatch, and O. Bachem, “Brax - A Differentiable Physics Engine for Large Scale Rigid Body Simulation,” 2021. [Online]. Available: http://github.com/google/brax
2021
-
[32]
MuJoCo: A physics engine for model-based control,
E. Todorov, T. Erez, and Y . Tassa, “MuJoCo: A physics engine for model-based control,” in2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2012, pp. 5026–5033
2012
-
[33]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
V . Makoviychuk, L. Wawrzyniak, Y . Guo, M. Lu, K. Storey, M. Mack- lin, D. Hoeller, N. Rudin, A. Allshire, A. Handa, and G. State, “Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning,”arXiv:2108.10470, 2021
work page internal anchor Pith review arXiv 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.