Recognition: 2 theorem links
· Lean TheoremPhysics-Informed Neural Optimal Control for Precision Immobilization Technique in Emergency Scenarios
Pith reviewed 2026-05-10 18:43 UTC · model grok-4.3
The pith
A compact physics-informed neural surrogate paired with hierarchical optimal control automates the precision immobilization technique for out-of-control vehicles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a hierarchical neural-OCP architecture, with an upper virtual decision layer producing PIT decision packages and a lower coupled-MPC layer handling execution, combined with PicoPINN as the dynamics surrogate, enables effective real-time automation of the precision immobilization technique. This is evidenced by a constructed PIT scenario dataset, surrogate comparisons showing reduced parameter count and lowest heading error, planning ablation results with higher success rates, and successful yaw reversals in most low-speed scaled vehicle trials.
What carries the argument
PicoPINN, a compact physics-informed surrogate obtained through knowledge distillation, hierarchical parameter clustering, and relation-matrix-based parameter reconstruction, which approximates nonlinear collision dynamics for use inside the optimal control problem.
If this is right
- Adding the upper planning layer increases PIT success rate from 63.8 percent to 76.7 percent in simulation.
- PicoPINN reduces the original PINN parameter count from 8965 to 812 while achieving the smallest average heading error of 0.112 rad among the learned surrogates.
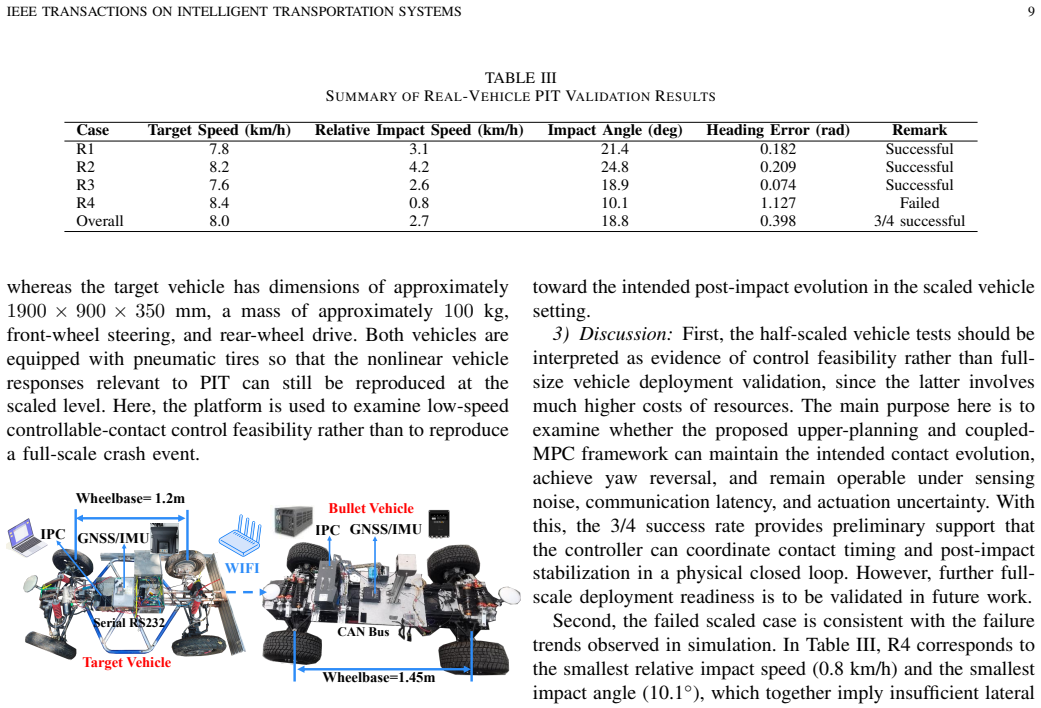
- The full framework produces 3 successful yaw reversals out of 4 low-speed controllable-contact PIT trials on a scaled by-wire vehicle.
- The approach satisfies real-time computation requirements by replacing full physics simulation with the compact surrogate inside the model predictive controller.
Where Pith is reading between the lines
- The separation of high-level decision packages from low-level interaction control could extend to other emergency maneuvers that involve nonlinear vehicle interactions.
- If the surrogate proves robust, similar distillation techniques might reduce computation in model predictive control for additional vehicle safety systems.
- Validation on varied road surfaces and at higher speeds would clarify how far the current low-speed scaled results can be extrapolated.
- The hierarchical structure might allow swapping the lower controller for different vehicle platforms without retraining the upper planner.
Load-bearing premise
The distilled PicoPINN surrogate accurately captures nonlinear collision dynamics and generalizes from simulation and low-speed scaled tests to full-scale high-speed real-world conditions.
What would settle it
A high-speed full-scale vehicle test in which heading prediction error exceeds 0.112 rad or PIT success rate falls below the reported simulation levels would show that the surrogate does not generalize as assumed.
Figures








read the original abstract
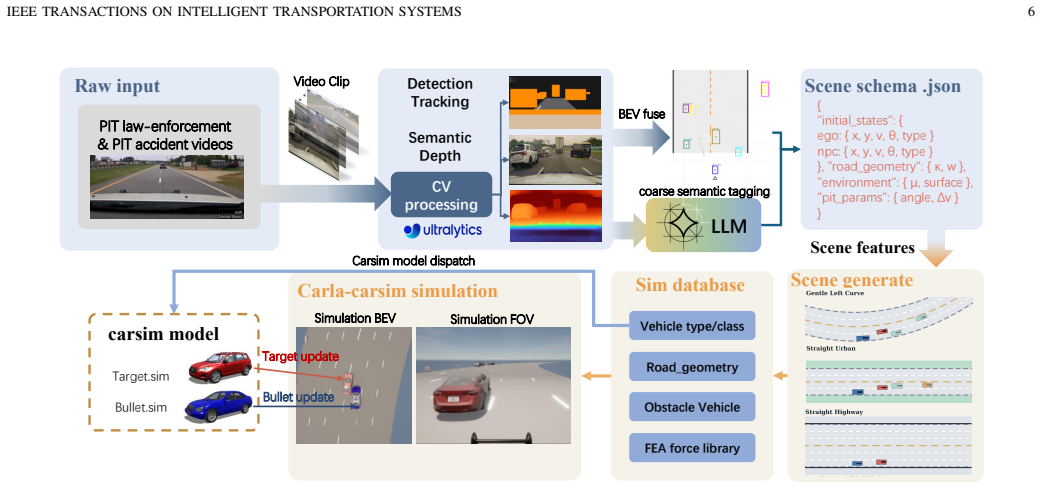
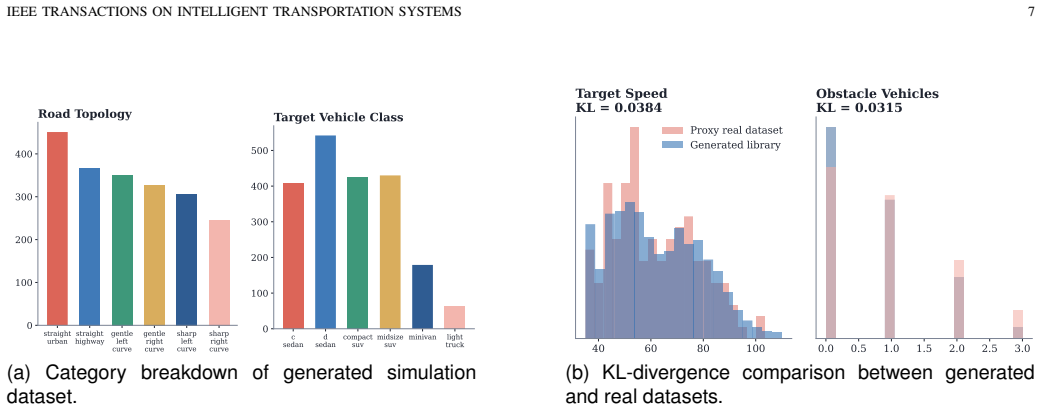
Precision Immobilization Technique (PIT) is a potentially effective intervention maneuver for emergency out-of-control vehicle, but its automation is challenged by highly nonlinear collision dynamics, strict safety constraints, and real-time computation requirements. This work presents a PIT-oriented neural optimal-control framework built around PicoPINN (Planning-Informed Compact Physics-Informed Neural Network), a compact physics-informed surrogate obtained through knowledge distillation, hierarchical parameter clustering, and relation-matrix-based parameter reconstruction. A hierarchical neural-OCP (Optimal Control Problem) architecture is then developed, in which an upper virtual decision layer generates PIT decision packages under scenario constraints and a lower coupled-MPC (Model Predictive Control) layer executes interaction-aware control. To evaluate the framework, we construct a PIT Scenario Dataset and conduct surrogate-model comparison, planning-structure ablation, and multi-fidelity assessment from simulation to scaled by-wire vehicle tests. In simulation, adding the upper planning layer improves PIT success rate from 63.8% to 76.7%, and PicoPINN reduces the original PINN parameter count from 8965 to 812 and achieves the smallest average heading error among the learned surrogates (0.112 rad). Scaled vehicle experiments are further used as evidence of control feasibility, with 3 of 4 low-speed controllable-contact PIT trials achieving successful yaw reversal.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a hierarchical neural optimal-control framework for automating the Precision Immobilization Technique (PIT) in emergency out-of-control vehicle scenarios. It centers on PicoPINN, a compact physics-informed neural network surrogate obtained via knowledge distillation, hierarchical parameter clustering, and relation-matrix reconstruction, paired with an upper virtual decision layer for PIT planning under constraints and a lower coupled-MPC layer for interaction-aware execution. Evaluations on a constructed PIT Scenario Dataset include surrogate comparisons, planning ablations, and multi-fidelity tests, reporting simulation success-rate gains from 63.8% to 76.7% with the planner, parameter reduction from 8965 to 812, smallest heading error of 0.112 rad, and 3-of-4 successes in low-speed scaled by-wire trials.
Significance. If the simulation gains and surrogate compactness hold under broader validation, the work would offer a practical route to real-time, collision-aware optimal control for safety-critical maneuvers by reducing model size while retaining physics-informed fidelity. The hierarchical structure and distillation pipeline are strengths that could generalize to other nonlinear vehicle dynamics problems.
major comments (2)
- [multi-fidelity assessment and scaled vehicle experiments] The scaled-vehicle experiments section reports only four low-speed trials (three successes) as evidence of control feasibility; this sample provides insufficient statistical power, scenario coverage, or high-speed data to support generalization of the PicoPINN surrogate or the full framework to full-scale real-world PIT conditions, directly limiting the central claim of real-world applicability.
- [surrogate-model comparison and planning-structure ablation] In the surrogate-model comparison and simulation results, the claim that PicoPINN achieves the smallest average heading error (0.112 rad) and the reported success-rate lift lack error bars, variance estimates, statistical tests, or details on test-set size and data exclusion; without these, the numerical improvements cannot be rigorously assessed for robustness.
minor comments (2)
- The abstract and method sections would benefit from explicit definition of the safety constraints and collision model assumptions used in the optimal control formulation to clarify the scope of the physics-informed component.
- Reproducibility would be aided by reporting the size, composition, and generation procedure of the PIT Scenario Dataset, along with the exact training/validation splits for the neural surrogates.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the scope and presentation of our results. We address each major comment below and indicate the revisions we will make.
read point-by-point responses
-
Referee: The scaled-vehicle experiments section reports only four low-speed trials (three successes) as evidence of control feasibility; this sample provides insufficient statistical power, scenario coverage, or high-speed data to support generalization of the PicoPINN surrogate or the full framework to full-scale real-world PIT conditions, directly limiting the central claim of real-world applicability.
Authors: We agree that four low-speed trials offer limited statistical power, lack high-speed coverage, and cannot support broad generalization claims to full-scale real-world conditions. These experiments were intended only as a preliminary feasibility demonstration of the closed-loop system on a scaled by-wire platform, not as comprehensive validation. The central claims of the work concern the hierarchical architecture, the PicoPINN surrogate construction, and the simulation-based performance gains on the PIT Scenario Dataset. We will revise the manuscript to explicitly state the preliminary nature of the hardware results, remove any implication of direct real-world applicability from the hardware section, and add a dedicated limitations paragraph discussing the gap to full-scale, high-speed deployment. revision: yes
-
Referee: In the surrogate-model comparison and simulation results, the claim that PicoPINN achieves the smallest average heading error (0.112 rad) and the reported success-rate lift lack error bars, variance estimates, statistical tests, or details on test-set size and data exclusion; without these, the numerical improvements cannot be rigorously assessed for robustness.
Authors: We acknowledge that the absence of error bars, variance estimates, and statistical details weakens the rigor with which the numerical improvements can be assessed. The test set comprises 200 held-out scenarios from the constructed PIT Scenario Dataset with no additional data exclusion beyond standard preprocessing. We will revise the surrogate comparison and planning ablation sections to report standard deviations across repeated training seeds and scenario batches, include error bars on the relevant figures, and provide the exact test-set size. Formal hypothesis testing can be added if the variance structure permits; otherwise we will note the descriptive statistics as the primary evidence. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper presents an empirical framework whose core claims (simulation success-rate lift from 63.8% to 76.7%, PicoPINN parameter reduction to 812 with 0.112 rad heading error, 3/4 scaled-vehicle successes) are direct measurements on held-out simulation data and physical trials. The surrogate construction (distillation, clustering, reconstruction) is a training procedure whose outputs are then evaluated separately; no equation or result is shown to equal its own inputs by construction. No load-bearing self-citations, uniqueness theorems, or ansatz smuggling appear in the reported chain. The hierarchical planner is introduced as an architectural choice validated by ablation, not derived as a mathematical necessity that collapses to fitted values.
Axiom & Free-Parameter Ledger
free parameters (1)
- PicoPINN parameter count
axioms (1)
- domain assumption Vehicle collision dynamics obey the physics laws embedded in the PINN loss function
Reference graph
Works this paper leans on
-
[1]
Vehicle dynamics in response to the maneuver of precision immobilization technique,
J. Zhou, J. Lu, and H. Peng, “Vehicle dynamics in response to the maneuver of precision immobilization technique,” inDynamic Systems and Control Conference, vol. 43352, 2008, pp. 577–584
2008
-
[2]
Collision model for vehicle motion prediction after light impacts,
J. Zhou, H. Peng, and J. Lu, “Collision model for vehicle motion prediction after light impacts,”Vehicle System Dynamics, vol. 46, no. sup1, pp. 3–15, 2008
2008
-
[3]
Autonomous execution of the precision immobilization technique,
D. D. Mascare ˜nas, C. J. Stull, and C. R. Farrar, “Autonomous execution of the precision immobilization technique,”Mechanical Systems and Signal Processing, vol. 87, pp. 153–168, 2017
2017
-
[4]
Motion planning for au- tonomous vehicles with the inclusion of post-impact motions for min- imising collision risk,
M. Parseh, M. Nybacka, and F. Asplund, “Motion planning for au- tonomous vehicles with the inclusion of post-impact motions for min- imising collision risk,”Vehicle System Dynamics, vol. 61, no. 6, pp. 1707–1733, 2023
2023
-
[5]
Collision mitigation and vehicle transportation safety using integrated vehicle dynamics control systems,
M. Elkady, A. Elmarakbi, J. MacIntyre, and M. Alhariri, “Collision mitigation and vehicle transportation safety using integrated vehicle dynamics control systems,”Journal of Traffic and Transportation Engi- neering (English Edition), vol. 4, no. 1, pp. 41–60, 2017
2017
-
[6]
Post-impact motion control of road vehicles,
D. Yang, T. Gordon, and U. Sander, “Post-impact motion control of road vehicles,”Vehicle System Dynamics, vol. 63, no. 7, pp. 1300–1357, 2025
2025
-
[7]
Yang,Vehicle Dynamics Control after Impacts in Multiple-Event Accidents
D. Yang,Vehicle Dynamics Control after Impacts in Multiple-Event Accidents. G”oteborg: Chalmers University of Technology, 2013
2013
-
[8]
An impact moment coefficient for vehicle collision analysis,
R. M. Brach, “An impact moment coefficient for vehicle collision analysis,”SAE Transactions, pp. 30–37, 1977
1977
-
[9]
Development of generic multibody road vehicle models for crashworthiness,
L. Sousa, P. Ver ´ıssimo, and J. Ambr ´osio, “Development of generic multibody road vehicle models for crashworthiness,”Multibody System Dynamics, vol. 19, no. 1-2, pp. 133–158, 2008
2008
-
[10]
A deep neural network inverse solution to recover pre-crash impact data of car collisions,
Q. Chen, Y . Xie, Y . Ao, T. Li, G. Chen, S. Ren, C. Wang, and S. Li, “A deep neural network inverse solution to recover pre-crash impact data of car collisions,”Transportation Research Part C: Emerging Technologies, vol. 126, p. 103009, 2021
2021
-
[11]
Multi-objective optimization of vehicle crashworthiness using a new particle swarm based approach,
A. R. Yildiz and K. N. Solanki, “Multi-objective optimization of vehicle crashworthiness using a new particle swarm based approach,”The International Journal of Advanced Manufacturing Technology, vol. 59, no. 1-4, pp. 367–376, 2012
2012
-
[12]
Identification of lumped parameter automotive crash models for bumper system development,
P. Jons ´en, E. Isaksson, K. G. Sundin, and M. Oldenburg, “Identification of lumped parameter automotive crash models for bumper system development,”International Journal of Crashworthiness, vol. 14, no. 6, pp. 533–541, 2009
2009
-
[13]
Performance evaluation of vehicle front structure in crash energy management using lumped mass spring system,
S. M. Ofochebe, C. G. Ozoegwu, and S. O. Enibe, “Performance evaluation of vehicle front structure in crash energy management using lumped mass spring system,”Advanced Modeling and Simulation in Engineering Sciences, vol. 2, no. 1, p. 2, 2015
2015
-
[14]
Pulse shape analysis and data reduction of real-life frontal crashes with modern passenger cars,
J. Iraeus and M. Lindquist, “Pulse shape analysis and data reduction of real-life frontal crashes with modern passenger cars,”International Journal of Crashworthiness, vol. 20, no. 6, pp. 535–546, 2015
2015
-
[15]
Huang,Vehicle Crash Mechanics, 1st ed
M. Huang,Vehicle Crash Mechanics, 1st ed. CRC Press, 2002
2002
-
[16]
Data-based modeling and estimation of vehicle crash processes in frontal fixed-barrier crashes,
Z. Wei, K. G. Robbersmyr, and H. R. Karimi, “Data-based modeling and estimation of vehicle crash processes in frontal fixed-barrier crashes,” Journal of the Franklin Institute, vol. 354, no. 12, pp. 4896–4912, 2017
2017
-
[17]
Current front stiffness of european vehicles with regard to compatibility,
J. Huibers and E. de Beer, “Current front stiffness of european vehicles with regard to compatibility,” SAE Technical Paper, Tech. Rep., 2001
2001
-
[18]
Optimal vehicle motion control to mitigate secondary crashes after an initial impact,
B.-J. Kim and H. Peng, “Optimal vehicle motion control to mitigate secondary crashes after an initial impact,” 2014, p. V001T10A002
2014
-
[19]
Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations,
M. Raissi, P. G. Perdikaris, and G. E. Karniadakis, “Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations,” Journal of Computational Physics, vol. 378, pp. 686–707, 2019
2019
-
[20]
Physics-informed machine learning,
G. E. Karniadakis, I. G. Kevrekidis, L. Lu, P. Perdikaris, S. Wang, and L. Yang, “Physics-informed machine learning,”Nature Reviews Physics, vol. 3, no. 6, pp. 422–440, 2021
2021
-
[21]
Automatic network structure discovery of physics informed neural networks via knowledge distillation,
Z. Liu, Y . Liu, X. Yan, W. Liu, H. Nie, S. Guo, and C.-a. Zhang, “Automatic network structure discovery of physics informed neural networks via knowledge distillation,”Nature Communications, vol. 16, p. 9558, 2025
2025
-
[22]
A physics-informed deep learning paradigm for car-following models,
Z. Mo, R. Shi, and X. Di, “A physics-informed deep learning paradigm for car-following models,”Transportation Research Part C: Emerging Technologies, vol. 130, p. 103240, 2021
2021
-
[23]
Physics- informed deep reinforcement learning-based integrated two-dimensional car-following control strategy for connected automated vehicles,
H. Shi, Y . Zhou, K. Wu, S. Chen, B. Ran, and Q. Nie, “Physics- informed deep reinforcement learning-based integrated two-dimensional car-following control strategy for connected automated vehicles,” Knowledge-Based Systems, vol. 269, p. 110485, 2023
2023
-
[24]
A physics-informed transformer model for vehicle trajectory prediction on highways,
M. Geng, J. Li, Y . Xia, and X. Chen, “A physics-informed transformer model for vehicle trajectory prediction on highways,”Transportation Research Part C: Emerging Technologies, vol. 154, p. 104272, 2023
2023
-
[25]
A hybrid physics-based and data-driven approach for car-following behavior modeling and analysis,
Q. Cheng, Y . Zhang, Z. Gu, Z. Wang, H. Liu, Y . Lin, and Z. Liu, “A hybrid physics-based and data-driven approach for car-following behavior modeling and analysis,”Transportation Research Part C: Emerging Technologies, vol. 177, p. 105207, 2025
2025
-
[26]
Fine-tuning hybrid physics-informed neural net- works for vehicle dynamics model estimation,
S. Fang and K. Yu, “Fine-tuning hybrid physics-informed neural net- works for vehicle dynamics model estimation,”IFAC-PapersOnLine, vol. 58, no. 28, pp. 810–815, 2024. IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS 11
2024
-
[27]
Physics-informed neural network for cross- dynamics vehicle trajectory stitching,
K. Long, X. Shi, and X. Li, “Physics-informed neural network for cross- dynamics vehicle trajectory stitching,”Transportation Research Part E: Logistics and Transportation Review, vol. 192, p. 103799, 2024
2024
-
[28]
Neural potential field for obstacle-aware local motion planning,
M. Alhaddad, K. Mironov, A. Staroverov, and A. Panov, “Neural potential field for obstacle-aware local motion planning,” Oct. 2023
2023
-
[29]
Learning for casadi: Data-driven models in numerical optimization,
T. Salzmann, J. Arrizabalaga, J. Andersson, M. Pavone, and M. Ryll, “Learning for casadi: Data-driven models in numerical optimization,” Dec. 2023
2023
-
[30]
An integrated framework for autonomous driving planning and tracking based on nnmpc consider- ing road surface variations,
Z. Gao, W. Wen, Y . Xing, and A. Tsourdos, “An integrated framework for autonomous driving planning and tracking based on nnmpc consider- ing road surface variations,”IEEE Transactions on Intelligent Vehicles, pp. 1–15, 2024
2024
-
[31]
Surround vehicle motion prediction using lstm-rnn for motion planning of autonomous vehicles at multi-lane turn intersections,
Y . Jeong, S. Kim, and K. Yi, “Surround vehicle motion prediction using lstm-rnn for motion planning of autonomous vehicles at multi-lane turn intersections,”IEEE Open Journal of Intelligent Transportation Systems, vol. 1, pp. 2–14, 2020
2020
-
[32]
A deep long short-term memory network embedded model predictive control strategies for car-following control of connected automated vehicles in mixed traffic,
Y . Zhou, Z. Zhang, F. Ding, S. Ahn, K. Wu, and B. Ran, “A deep long short-term memory network embedded model predictive control strategies for car-following control of connected automated vehicles in mixed traffic,”IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 7, pp. 8209–8220, Jul. 2024
2024
-
[33]
Data-driven lstm model and predictive control for vehicle lateral motion,
K. H. Kim, C. Jeong, J. Kim, S. Lee, and C. M. Kang, “Data-driven lstm model and predictive control for vehicle lateral motion,”Journal of Electrical Engineering & Technology, vol. 19, no. 6, pp. 3635–3644, Aug. 2024
2024
-
[34]
Lstm-mpc: A deep learning based predictive control method for multimode process control,
K. Huang, K. Wei, F. Li, C. Yang, and W. Gui, “Lstm-mpc: A deep learning based predictive control method for multimode process control,” IEEE Transactions on Industrial Electronics, vol. 70, no. 11, pp. 11 544– 11 554, Nov. 2023
2023
-
[35]
Real-time neural-mpc: Deep learning model predictive control for quadrotors and agile robotic platforms,
T. Salzmann, E. Kaufmann, J. Arrizabalaga, M. Pavone, D. Scaramuzza, and M. Ryll, “Real-time neural-mpc: Deep learning model predictive control for quadrotors and agile robotic platforms,”IEEE Robotics and Automation Letters, vol. 8, no. 4, pp. 2397–2404, Apr. 2023
2023
-
[36]
Y . Jiang, J. Wang, and D. Li, “Physics-informed neural network modeling of vehicle collision dynamics in precision immobilization technique maneuvers,” 2025. [Online]. Available: https://arxiv.org/abs/ 2510.13461
-
[37]
L. Yang, B. Kang, Z. Huang, Z. Zhao, X. Xu, J. Feng, and H. Zhao, “Depth anything v2,” 2024. [Online]. Available: https://arxiv.org/abs/2406.09414 Author info Yangye Jiangobtained his B.S. degree of Vehicle Engineering from Zhejiang University, Hangzhou, China, in 2023. He joined the Research Group of Human-Mobility-Automation, ZJU in August 2022 and is c...
work page internal anchor Pith review arXiv 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.