Stochastic Adaptive Control for Systems with Nonlinear Parameterization: Almost Sure Stability and Tracking
Pith reviewed 2026-05-10 18:30 UTC · model grok-4.3
The pith
An online nonlinear weighted least-squares estimator with attenuating excitation achieves almost sure global stability and average tracking for nonlinearly parameterized stochastic systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The resulting closed-loop system is globally stable and the system trajectory can track, in a long-run average sense, the reference trajectory generated with the true system parameters. This is achieved via an online nonlinear weighted least-squares parameter estimation algorithm that attains global strong consistency without persistent excitation conditions, combined with an adaptive control algorithm using an attenuating excitation signal.
What carries the argument
The nonlinear weighted least-squares (WLS) estimator for parameter consistency and the attenuating excitation signal in the feedback control law.
Load-bearing premise
The nonlinear weighted least-squares estimator achieves global strong consistency without persistent excitation conditions on the trajectory data.
What would settle it
A simulation or example where the parameter estimates fail to converge strongly to the true values despite the attenuating excitation, or where the closed-loop system diverges, would falsify the stability and tracking claims.
Figures

read the original abstract
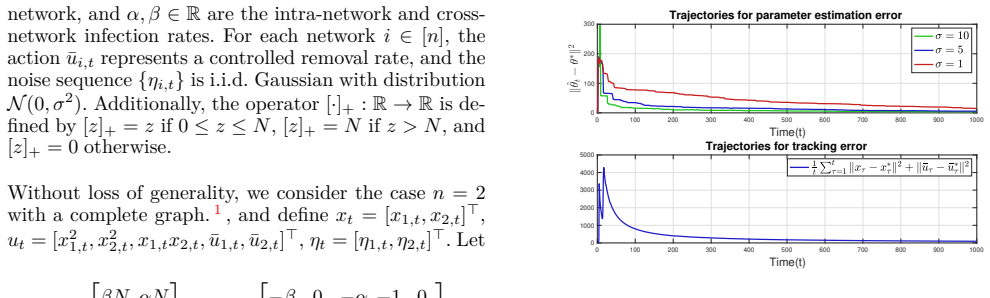
This paper concerns the adaptive control problem for a class of nonlinear stochastic systems in which the state update is given by a nonlinear function of linear dynamics plus additive stochastic noise. Such systems arise in a wide range of applications, including recurrent neural networks, social dynamics, and signal processing. Despite their importance, adaptive control for these systems remains relatively unexplored in the literature. This gap is primarily due to the inherently nonconvex dependence of the system dynamics on unknown parameters, which significantly complicates both controller design and analysis. To address these challenges, we propose an online nonlinear weighted least-squares (WLS)-based parameter estimation algorithm and establish the global strong consistency of the resulting parameter estimates. In contrast to most existing results, our consistency analysis does not rely on restrictive assumptions such as persistent excitation conditions of the trajectory data, making it applicable to stochastic adaptive control settings. Building on the proposed estimator, we further develop an adaptive control algorithm with an attenuating excitation signal that can effectively combine adaptive estimation and feedback control. Finally, we are able to show that the resulting closed-loop system is globally stable and that the system trajectory can track, in a long-run average sense, the reference trajectory generated with the true system parameters. The proposed methods and theoretical results are finally validated through simulations in two nonlinear interaction network applications.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper addresses adaptive control for stochastic nonlinearly parameterized systems of the form x_{t+1} = f(A(θ)x_t + B u_t) + w_t. It proposes an online nonlinear weighted least-squares (WLS) estimator, proves its global strong consistency without persistent excitation (PE) conditions on the data, and combines it with a certainty-equivalence controller that injects an attenuating excitation signal. The main results are almost-sure global stability of the closed loop and long-run average tracking of the reference trajectory generated by the true parameters. The claims are supported by theoretical analysis and simulations on nonlinear interaction networks.
Significance. If the global strong consistency of the nonlinear WLS estimator holds without PE and without hidden dependence on the control signal, the result would be significant for adaptive control of nonconvex parameterizations arising in recurrent neural networks, social dynamics, and signal processing. The almost-sure stability and average tracking claims are strong; the avoidance of PE is a notable technical contribution relative to standard stochastic adaptive control literature.
major comments (2)
- [§3] §3 (Estimator Consistency): The global strong consistency of the nonlinear WLS estimator (Theorem 1) is the load-bearing step for all subsequent stability and tracking claims. The argument appears to rely on the weighting matrix W and the specific attenuation schedule, but it is not clear from the derivation whether injectivity or strong convexity conditions on f are explicitly assumed or derived, nor how the non-convex loss is shown to have a unique global minimizer almost surely without PE on the regressors. A concrete counter-example or growth condition on f that could violate consistency should be ruled out.
- [§4] §4 (Closed-Loop Stability): The proof that the certainty-equivalence controller with attenuating excitation yields global stability and average tracking (Theorem 2) uses the estimator consistency result. However, the attenuating excitation is introduced for control purposes; it is unclear whether the consistency analysis in §3 is fully independent of this signal or whether the boundedness of states (needed for the regressor richness) is established without circularity. The long-run average tracking claim should be accompanied by an explicit rate or bound that does not degrade with the attenuation schedule.
minor comments (2)
- [§2] Notation for the nonlinear function f and the weighting matrix W should be introduced with explicit assumptions on their properties (e.g., Lipschitz constants or boundedness) at the first appearance.
- [§5] The simulation section would benefit from reporting the specific attenuation rate used and sensitivity of the tracking error to that choice.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review of our manuscript. The comments raise important points about the clarity of the consistency proof and the structure of the closed-loop analysis. We address each major comment below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [§3] §3 (Estimator Consistency): The global strong consistency of the nonlinear WLS estimator (Theorem 1) is the load-bearing step for all subsequent stability and tracking claims. The argument appears to rely on the weighting matrix W and the specific attenuation schedule, but it is not clear from the derivation whether injectivity or strong convexity conditions on f are explicitly assumed or derived, nor how the non-convex loss is shown to have a unique global minimizer almost surely without PE on the regressors. A concrete counter-example or growth condition on f that could violate consistency should be ruled out.
Authors: We appreciate this observation. The proof of Theorem 1 establishes global strong consistency by showing that the weighted nonlinear least-squares criterion converges almost surely to a function whose unique minimizer is the true parameter θ*. This relies on the specific structure of the system (the composition of the linear-in-parameter map with the known nonlinearity f) together with the positive-definiteness of the weighting matrix W and the chosen attenuation schedule. Under the standing assumptions (continuous differentiability of f and the linear growth condition stated in Assumption 1), the map θ ↦ f(A(θ)x + Bu) is injective for each fixed (x,u) in the relevant domain; this injectivity is derived rather than postulated separately and is used to rule out other candidate minimizers. The non-convexity of the loss is handled by a direct argument that exploits the strong law of large numbers applied to the martingale difference noise terms; persistent excitation of the regressors is not required because the additive noise supplies the necessary richness in probability. To improve clarity we will (i) explicitly restate the derived injectivity property in the statement of Theorem 1 and (ii) add a short remark that excludes potential counter-examples by invoking the linear growth bound on f. No additional strong-convexity assumption is needed. revision: partial
-
Referee: [§4] §4 (Closed-Loop Stability): The proof that the certainty-equivalence controller with attenuating excitation yields global stability and average tracking (Theorem 2) uses the estimator consistency result. However, the attenuating excitation is introduced for control purposes; it is unclear whether the consistency analysis in §3 is fully independent of this signal or whether the boundedness of states (needed for the regressor richness) is established without circularity. The long-run average tracking claim should be accompanied by an explicit rate or bound that does not degrade with the attenuation schedule.
Authors: The consistency analysis of §3 is formulated for any input sequence that keeps the state process in a set of finite moments; it does not depend on the particular form of the control law. In the closed-loop proof we first establish, via a separate Lyapunov argument that accounts for the vanishing excitation, that the state remains bounded almost surely. Only after this boundedness step do we invoke the consistency result. We acknowledge that the current ordering of arguments may give the impression of circularity and will therefore restructure the proof of Theorem 2 to present the boundedness step first, followed by consistency and then the tracking conclusion. The attenuating excitation is constructed so that its contribution to the regressor vanishes at a rate compatible with the weighting schedule, preserving the almost-sure convergence. For the long-run average tracking we prove that the Cesàro mean of the tracking error converges to zero almost surely. An explicit non-asymptotic rate is not derived because any such rate would necessarily depend on the particular attenuation schedule chosen to guarantee stability; we will add a remark clarifying this dependence and noting that the average convergence itself remains independent of the schedule. revision: partial
Circularity Check
No significant circularity; derivation remains self-contained
full rationale
The paper defines a nonlinear WLS estimator, claims global strong consistency without PE (via direct analysis of the loss and noise model), then augments the certainty-equivalence controller with an independent attenuating excitation term. The closed-loop stability and average tracking results are derived from the estimator's convergence property plus standard stochastic Lyapunov arguments. No equation or step reduces the consistency claim to the control law, nor renames a fitted quantity as a prediction, nor relies on a self-citation chain for the uniqueness or injectivity conditions. The weighting and attenuation schedules are explicit design choices whose effect on the proof is stated separately from the estimator definition itself.
Axiom & Free-Parameter Ledger
free parameters (2)
- weighting matrix in WLS
- attenuation rate of excitation signal
axioms (2)
- domain assumption The nonlinear function satisfies conditions that allow the WLS estimator to be strongly consistent without persistent excitation.
- standard math Additive stochastic noise is such that standard martingale or ergodic theorems apply to the closed-loop trajectory.
Reference graph
Works this paper leans on
-
[1]
Bibitem after note You are using a bibitem after a note in a subbibitems environment; note should the last item in a subbibitems environment \@itemnote @bb@error [] @noitemnote \@tempa \@noitemnote \@noitemnote \@itemnote @bibitem\@bibitem @lbibitem\@lbibitem \@bibitem#1 \@itemnote @bibitem #1 \@tempa @noitemnote \@lbibitem[#1]#2 \@itemnote @lbibitem[#1] ...
-
[2]
@stdbsttrue @ctr \@lbibitem [ @ctr] \@bibitem##1 @ctr \@lbibitem[ @ctr] ##1 @bb@error\@mkbberr @filesw @natbibloaded \@auxout \@itemslabel @bibnum a-- @ctr \@auxout \@itemslabel :s @bibnum \@auxout \@itemslabel @bibnum a-- @ctr \@auxout \@itemslabel :s @bibnum @ctr @bibnum @citex\@citex \@tempcntc @citex[#1]#2 @filesw \@auxout #2 \@tempcnta @\@tempcntb @n...
work page 1991
-
[3]
Elman, J. L. (1990). Finding structure in time. Cognitive Science , 14(2), 179--211
work page 1990
-
[4]
Mienye, I. D., Swart, T. G., & Obaido, G. (2024). A comprehensive review of deep learning: Architectures, recent advances, and applications. Information , 15(12), 755
work page 2024
-
[5]
Sch\"afer, A. M., & Zimmermann, H. G. (2006). Recurrent neural networks are universal approximators, In International Conference on Artificial Neural Networks , Berlin, Heidelberg: Springer Berlin Heidelberg, 632--640
work page 2006
-
[6]
Keeler, J. D., Pichler, E. E., & Ross, J. (1989). Noise in neural networks: Thresholds, hysteresis, and neuromodulation of signal-to-noise. Proceedings of the National Academy of Sciences , 86(5), 1712--1716
work page 1989
-
[7]
Wu, J. (2001). Introduction to Neural Dynamics and Signal Transmission Delay . Walter de Gruyter
work page 2001
-
[8]
Durlauf, S. N., & Ioannides, Y. M. (2010). Social interactions. Annual Review of Economics , 2(1), 451--478
work page 2010
-
[9]
Xing, Y., He, X., Fang, H., & Johansson, K. H. (2022). Recursive network estimation for a model with binary-valued states. IEEE Transactions on Automatic Control , 68(7), 3872--3887
work page 2022
-
[10]
Ebert, P. M., Mazo, J. E., & Taylor, M. G. (1969). Overflow oscillations in digital filters. Bell System Technical Journal , 48(9), 2999--3020
work page 1969
-
[11]
Ooba, T. (2003). Stability of linear discrete dynamics employing state saturation arithmetic. IEEE Transactions on Automatic Control , 48(4), 626--630
work page 2003
-
[12]
Bizyaeva, A., Franci, A., & Leonard, N. E. (2022). Nonlinear opinion dynamics with tunable sensitivity. IEEE Transactions on Automatic Control , 68(3), 1415--1430
work page 2022
-
[13]
Su, W., Chen, X., Yu, Y., & Chen, G. (2021). Noise-based control of opinion dynamics. IEEE Transactions on Automatic Control , 67(6), 3134--3140
work page 2021
-
[14]
Ancona, C., Lellis, P. D., & Iudice, F. L. (2023). Influencing opinions in a nonlinear pinning control model. IEEE Control Systems Letters , 7, 1945--1950
work page 2023
-
[15]
Schoukens, J., & Ljung, L. (2019). Nonlinear system identification: A user-oriented road map. IEEE Control Systems Magazine , 39(6), 28--99
work page 2019
-
[16]
Chen, H., & Guo, L. (1991). Identification and Stochastic Adaptive Control . Boston, MA: Birkhäuser
work page 1991
-
[17]
Wahlberg, B., Welsh, J., & Ljung, L. (2015). Identification of stochastic Wiener systems using indirect inference. IFAC-PapersOnLine , 48(28), 620--625
work page 2015
-
[18]
Guo, L. (1996). Self-convergence of weighted least squares with applications to stochastic adaptive control. IEEE Transactions on Automatic Control , 41(1), 79--89
work page 1996
-
[19]
Foster, D., Sarkar, T., & Rakhlin, A. (2020). Learning nonlinear dynamical systems from a single trajectory. In Learning for Dynamics and Control , 851--861
work page 2020
-
[20]
Oymak, S. (2019). Stochastic gradient descent learns state equations with nonlinear activations. In Conference on Learning Theory , 2551--2579
work page 2019
-
[21]
Kowshik, S., Nagaraj, D., Jain, P., & Netrapalli, P. (2021). Near-optimal offline and streaming algorithms for learning non-linear dynamical systems. Advances in Neural Information Processing Systems , 34, 8518--8531
work page 2021
-
[22]
Sattar, Y., & Oymak, S. (2022). Non-asymptotic and accurate learning of nonlinear dynamical systems. Journal of Machine Learning Research , 23(140), 1--49
work page 2022
-
[23]
Åström, K. J., & Wittenmark, B. (1973). On self tuning regulators. Automatica , 9(2), 185--199
work page 1973
-
[24]
Lai, T. L., & Wei, C. Z. (1982). Least squares estimates in stochastic regression models with applications to identification and control of dynamic systems. The Annals of Statistics , 10(1), 154--166
work page 1982
-
[25]
Goodwin, G. C., Ramadge, P. J., & Caines, P. E. (1981). Discrete time stochastic adaptive control. SIAM Journal on Control and Optimization , 19(6), 829--853
work page 1981
-
[26]
Kumar, P. R. (1990). Convergence of adaptive control schemes using least squares parameter estimates. IEEE Transactions on Automatic Control , 35(4), 416--424
work page 1990
-
[27]
Guo, L. (1995). Convergence and logarithm laws of self-tuning regulators. Automatica , 31(3), 435--450
work page 1995
-
[28]
Liu, N., Zhao, C., Tan, S., & Lü, J. (2025). Optimal adaptive control of linear stochastic systems with quadratic cost function. IEEE Transactions on Automatic Control . 70(10), 7024 - 7031
work page 2025
-
[29]
Dörfler, F., Tesi, P., & De Persis, C. (2023). On the certainty-equivalence approach to direct data-driven LQR design. IEEE Transactions on Automatic Control , 68(12), 7989--7996
work page 2023
-
[30]
Chiuso, A., Fabris, M., Breschi, V., & Formentin, S. (2025). Harnessing uncertainty for a separation principle in direct data-driven predictive control. Automatica , 173, 112070
work page 2025
-
[31]
Bian, T., Jiang, Y., & Jiang, Z. P. (2016). Adaptive dynamic programming for stochastic systems with state and control dependent noise. IEEE Transactions on Automatic Control , 61(12), 4170--4175
work page 2016
-
[32]
Guo, L. (1997). On critical stability of discrete-time adaptive nonlinear control. IEEE Transactions on Automatic Control , 42(11), 1488--1499
work page 1997
-
[33]
Bercu, B., & Portier, B. (2002). Adaptive control of parametric nonlinear autoregressive models via a new martingale approach. IEEE Transactions on Automatic Control, 47(9), 1524--1528
work page 2002
-
[34]
Li, C., & Lam, J. (2013). Stabilization of discrete-time nonlinear uncertain systems by feedback based on LS algorithm. SIAM Journal on Control and Optimization, 51(2), 1128--1151
work page 2013
-
[35]
Li, W., & Krstic, M. (2020). Stochastic adaptive nonlinear control with filterless least squares. IEEE Transactions on Automatic Control , 66(9), 3893--3905
work page 2020
-
[36]
Liu, Z., & Li, C. (2025). Optimal adaptive output regulation of discrete-time nonlinear stochastic systems. SIAM Journal on Control and Optimization , 63(4), 2369--2396
work page 2025
-
[37]
Ma, H. (2007). Finite-model adaptive control using WLS-like algorithm. Automatica , 43(4), 677--684
work page 2007
-
[38]
Li, C., & Chen, M. Z. Q. (2015). Simultaneous identification and stabilization of nonlinearly parameterized discrete-time systems by nonlinear least squares algorithm. IEEE Transactions on Automatic Control , 61(7), 1810--1823
work page 2015
-
[39]
Zhang, L., Zhao, Y., & Guo, L. (2022). Identification and adaptation with binary-valued observations under non-persistent excitation. Automatica , 138, 110158
work page 2022
-
[40]
Zhang, L., & Guo, L. (2025). Adaptive tracking control with binary-valued output observations. IEEE Transactions on Automatic Control . DOI: 10.1109/TAC.2025.3631410
- [41]
-
[42]
Zhao, Y., Guo, J., & Zhang, J. (2013). Adaptive tracking control of linear systems with binary-valued observations and periodic target. IEEE Transactions on Automatic Control, 58(5), 1293--1298
work page 2013
-
[43]
Zhao, W., Weyer, E., Yin, G., Dong, D., Zhang, Y., & Shen, T. (2023). Adaptive regulation of block-oriented nonlinear systems using binary sensors with applications to automotive engine control. IEEE Transactions on Automatic Control, 68(3), 1369--1382
work page 2023
-
[44]
E., Guo, L., & Pasik-Duncan, B
Duncan, T. E., Guo, L., & Pasik-Duncan, B. (1999). Adaptive continuous-time linear quadratic Gaussian control. IEEE Transactions on Automatic Control, 44(9), 1653--1662
work page 1999
-
[45]
Hager, W. W. (1989). Updating the inverse of a matrix. SIAM Review, 31(2), 221--239
work page 1989
-
[46]
Van der Schaft, A. (2000). L_2 -gain and Passivity Techniques in Nonlinear Control . Berlin, Heidelberg: Springer Berlin Heidelberg
work page 2000
-
[47]
Bloem, M., Alpcan, T., & Başar, T. (2009). Optimal and robust epidemic response for multiple networks. Control Engineering Practice , 17, 525--533
work page 2009
-
[48]
(2025) Collective decision-making dynamics in hypernetworks
Fontan, A., & Zhang, S. (2025) Collective decision-making dynamics in hypernetworks. IEEE 64th Conference on Decision and Control (CDC) , 6222--6227
work page 2025
-
[49]
Hildebrandt, T. H. (1942). Remarks on the Abel-Dini theorem. The American Mathematical Monthly , 49(7), 441--445
work page 1942
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.