Recognition: 2 theorem links
· Lean TheoremToward Generalizable Graph Learning for 3D Engineering AI: Explainable Workflows for CAE Mode Shape Classification and CFD Field Prediction
Pith reviewed 2026-05-10 17:58 UTC · model grok-4.3
The pith
Physics-aware graphs let GNNs generalize CAE mode classification and CFD field prediction across automotive variants with limited labels.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central discovery is a practical graph learning framework where heterogeneous 3D engineering assets are transformed into physics-aware graph representations that Graph Neural Networks use for both classification of CAE vibration mode shapes across vehicle and finite element variants under label scarcity, and for prediction of CFD aerodynamic fields across body shape variants, with symmetry preserving down sampling to retain accuracy at reduced cost, along with data generation guidance for engineers.
What carries the argument
Physics-aware graph representations of 3D engineering assets processed by Graph Neural Networks, including region-aware BiW graphs and symmetry-preserving downsampling.
If this is right
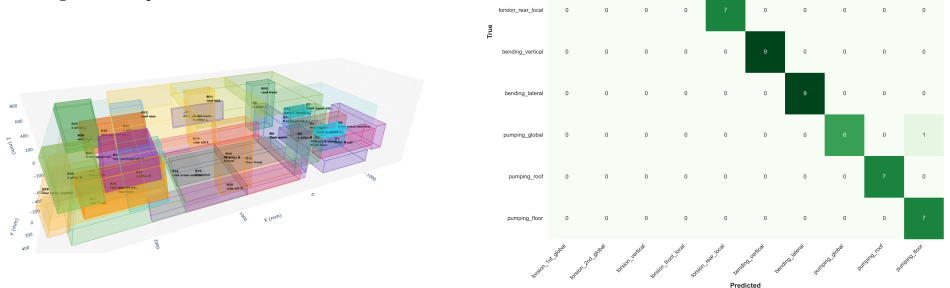
- Region-aware BiW graphs enable explainable mode classification that works across different vehicle and FE variants even with limited labels.
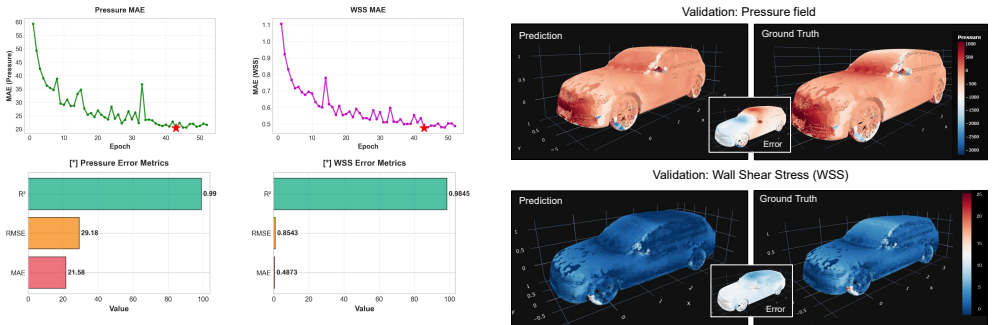
- Physics-informed GNN surrogates predict pressure and wall shear stress fields for new aerodynamic body shapes.
- Symmetry preserving down sampling reduces computational cost while maintaining prediction accuracy.
- The data generation guidance helps identify which simulations or labels would most improve the models.
- These elements together form a reusable workflow supporting trustworthy decision making in CAE and CFD.
Where Pith is reading between the lines
- Similar graph conversion techniques might extend to other engineering simulations involving 3D meshes, such as thermal or structural optimization problems.
- Explainability in these workflows could facilitate better integration with traditional engineering validation and certification processes.
- Advances in handling large-scale graphs could further scale this approach to more complex full-vehicle models.
Load-bearing premise
That converting heterogeneous engineering assets into physics-aware graph representations enables GNNs to generalize across vehicle and FE variants under label scarcity while retaining accuracy.
What would settle it
A test showing that a GNN trained on the graph representations fails to maintain classification accuracy or field prediction error rates when applied to a substantially different vehicle or body shape variant compared with traditional methods.
Figures









read the original abstract
Automotive engineering development increasingly relies on heterogeneous 3D data, including finite element (FE) models, body-in-white (BiW) representations, CAD geometry, and CFD meshes. At the same time, engineering teams face growing pressure to shorten development cycles, improve performance and accelerate innovation. Although artificial intelligence (AI) is increasingly explored in this domain, many current methods remain task-specific, difficult to interpret, and hard to reuse across development stages. This paper presents a practical graph learning framework for 3D engineering AI, in which heterogeneous engineering assets are converted into physics-aware graph representations and processed by Graph Neural Networks (GNNs). The framework is designed to support both classification and prediction tasks. The framework is validated on two automotive applications: CAE vibration mode shape classification and CFD aerodynamic field prediction. For CAE vibration mode classification, a region-aware BiW graph supports explainable mode classification across vehicle and FE variants under label scarcity. For CFD aerodynamic field prediction, a physics-informed surrogate predicts pressure and wall shear stress (WSS) across aerodynamic body shape variants, while symmetry preserving down sampling retains accuracy with lower computational cost. The framework also outlines data generation guidance that can help engineers identify which additional simulations or labels are valuable to collect next. These results demonstrate a practical and reusable engineering AI workflow for more trustworthy CAE and CFD decision support.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a graph learning framework that converts heterogeneous 3D automotive engineering assets (FE models, BiW, CAD, CFD meshes) into physics-aware graph representations processed by GNNs. It supports both classification and regression tasks and is validated on two applications: (1) region-aware BiW graph-based explainable classification of CAE vibration mode shapes across vehicle/FE variants under label scarcity, and (2) physics-informed GNN surrogate prediction of pressure and wall shear stress fields across aerodynamic body shapes, using symmetry-preserving downsampling to reduce cost while retaining accuracy. The framework also includes guidance for identifying valuable additional simulations or labels.
Significance. If the empirical claims hold with adequate controls, the work offers a reusable, physics-aware workflow that could reduce task-specificity and improve interpretability and generalization in engineering AI. The emphasis on label scarcity, cross-variant reuse, and actionable data-generation guidance addresses practical bottlenecks in CAE/CFD decision support and could shorten automotive development cycles.
major comments (1)
- [Abstract] Abstract: The central validation claims (generalization across vehicle/FE variants under label scarcity for mode classification; retention of accuracy across aerodynamic shapes for field prediction) are asserted without any reported quantitative metrics, baselines, error bars, data-split protocols, or ablation results. These details are load-bearing for evaluating whether the physics-aware graph conversion actually enables the claimed generalization.
Simulated Author's Rebuttal
We thank the referee for the constructive review and the recommendation for major revision. We address the concern regarding the abstract below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central validation claims (generalization across vehicle/FE variants under label scarcity for mode classification; retention of accuracy across aerodynamic shapes for field prediction) are asserted without any reported quantitative metrics, baselines, error bars, data-split protocols, or ablation results. These details are load-bearing for evaluating whether the physics-aware graph conversion actually enables the claimed generalization.
Authors: We agree that the abstract should explicitly reference key quantitative results to support the generalization claims. The full manuscript reports these details in the experimental sections, including classification metrics (e.g., accuracy and F1 scores across vehicle/FE variants under varying label scarcity), regression errors (MAE/RMSE for pressure and wall shear stress fields), baseline comparisons, error bars from repeated trials, data-split protocols (cross-variant train/test splits), and ablation studies on graph construction and symmetry-preserving operations. To address the referee's point directly, we will revise the abstract to incorporate representative quantitative highlights and brief protocol references while preserving its length and focus. This change will be implemented in the revised manuscript. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper describes a graph-based framework converting engineering assets to physics-aware graphs for GNN processing, validated empirically on two automotive tasks (CAE mode classification and CFD field prediction). No equations, derivations, or self-referential steps are present in the provided text that reduce predictions or uniqueness claims to fitted parameters or prior self-citations by construction. Central claims rest on described applications and data guidance rather than self-definitional or load-bearing self-citation chains. This is the expected honest non-finding for a methods/validation paper without internal mathematical reductions.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Heterogeneous 3D engineering assets can be converted into physics-aware graph representations that support GNN processing for both classification and regression tasks.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclearheterogeneous engineering assets are converted into physics-aware graph representations and processed by Graph Neural Networks (GNNs)... region-aware BiW graph... symmetry preserving down sampling
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearphysics-informed surrogate predicts pressure and wall shear stress... Bernoulli-style consistency, mass conservation term
Reference graph
Works this paper leans on
-
[1]
Virtual Engineering at Work: The Chal- lengesforDesigningMechatronicProducts,
H. Van der Auweraer, J. Anthonis, S. De Bruyne, and J. Leuridan, “Virtual Engineering at Work: The Chal- lengesforDesigningMechatronicProducts,”Engineer- ing with Computers, vol. 29, pp. 389–408, 2013
2013
-
[2]
D. J. Ewins,Modal Testing: Theory, Practice and Ap- plication. London: Research Studies Press, 2000
2000
-
[3]
New Horizons of Vehicle Aerodynamics,
C. Jessing, D. Stoll, T. Kuthada, and J. Wiedemann, “New Horizons of Vehicle Aerodynamics,”Proceed- ings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering,vol.231,no.9, pp. 1190–1202, 2017
2017
-
[4]
Introduction ofaNewRealisticGenericCarModelforAerodynamic Investigations,
A.I.Heft,T.Indinger,andN.A.Adams,“Introduction ofaNewRealisticGenericCarModelforAerodynamic Investigations,”SAE Technical Papers, 2012
2012
-
[5]
StructureModeShapes Classification Using Graph Convolutional Networks in Automotive Application,
S. Tohmuang, M. Fard, P. Marzocca, J. L. Swayze, J.E.Huber,andH.M.Fayek,“StructureModeShapes Classification Using Graph Convolutional Networks in Automotive Application,”Computers & Structures, vol. 314, p. 107767, 2025
2025
-
[6]
StudyoftheEffectofBody- in-White Structural Design in Road Vehicle Dynam- ics,
P. Millan, B. Desai, T. Cowlam, E. Marques, L. F. M. daSilva,andJ.Ambrósio,“StudyoftheEffectofBody- in-White Structural Design in Road Vehicle Dynam- ics,”Vehicle System Dynamics, vol. 0, no. 0, pp. 1–25, 2025
2025
-
[7]
Prediction of Aerodynamic Flow Fields Using Convolutional Neural Networks,
S. Bhatnagar, Y. Afshar, S. Pan, K. Duraisamy, and S. Kaushik, “Prediction of Aerodynamic Flow Fields Using Convolutional Neural Networks,”Computa- tional Mechanics, vol. 64, no. 2, pp. 525–545, 2019
2019
-
[8]
Dri- vAerNet++: A Large-Scale Multimodal Car Dataset with Computational Fluid Dynamics Simulations and Deep Learning Benchmarks,
M. Elrefaie, F. Morar, A. Dai, and F. Ahmed, “Dri- vAerNet++: A Large-Scale Multimodal Car Dataset with Computational Fluid Dynamics Simulations and Deep Learning Benchmarks,” inAdvances in Neural Information Processing Systems, vol. 37, pp. 499–536,
-
[9]
Datasets and Benchmarks Track
-
[10]
DrivAerStar: AnIndustrial-GradeCFD DatasetforVehicleAerodynamicOptimization,
J.Qiu,L.Kuang,G.Wang,Y.Xu,L.Cui,S.Fu,Y.Zhu, andR.Zhang,“DrivAerStar: AnIndustrial-GradeCFD DatasetforVehicleAerodynamicOptimization,”arXiv preprint arXiv:2510.16857, 2025
-
[11]
Learning to Simu- late Complex Physics with Graph Networks,
A. Sanchez-Gonzalez, J. Godwin, T. Pfaff, R. Ying, J. Leskovec, and P. W. Battaglia, “Learning to Simu- late Complex Physics with Graph Networks,” inInter- national Conference on Machine Learning, pp. 8459– 8468, 2020
2020
-
[12]
AcceleratingEulerianFluidSimulationWithCon- volutional Networks,
J.Tompson,K.Schlachter,P.Sprechmann,andK.Per- lin,“AcceleratingEulerianFluidSimulationWithCon- volutional Networks,” inInternational Conference on Machine Learning, pp. 3424–3433, 2017
2017
-
[13]
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation,
C. R. Qi, H. Su, K. Mo, and L. J. Guibas, “PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation,” inIEEE Conference on Computer Vi- sion and Pattern Recognition, pp. 652–660, 2017
2017
-
[14]
Forrester, A
A. Forrester, A. Sobester, and A. Keane,Engineering Design via Surrogate Modelling: A Practical Guide. John Wiley & Sons, 2008
2008
-
[15]
Physics-Informed Neural Networks: A Deep Learn- ing Framework for Solving Forward and Inverse Prob- lems Involving Nonlinear Partial Differential Equa- tions,
M. Raissi, P. Perdikaris, and G. E. Karniadakis, “Physics-Informed Neural Networks: A Deep Learn- ing Framework for Solving Forward and Inverse Prob- lems Involving Nonlinear Partial Differential Equa- tions,”Journal of Computational Physics, vol. 378, pp. 686–707, 2019
2019
-
[16]
Graph Attention Networks,
P. Veličković, G. Cucurull, A. Casanova, A. Romero, P. Liò, and Y. Bengio, “Graph Attention Networks,” inInternational Conference on Learning Representa- tions, 2018
2018
-
[17]
2025 arXiv preprint arXiv:2505.22904
Y. Choi, S. W. Cheung, Y. Kim, P.-H. Tsai, A. N. Diaz, I. Zanardi, S. W. Chung, D. M. Copeland, C.Kendrick,W.Anderson,T.Iliescu,andM.Heinken- schloss, “Defining Foundation Models for Computa- tional Science: A Call for Clarity and Rigor,”arXiv preprint arXiv:2505.22904, 2025
-
[18]
Mode Calcula- tion and Testing of a Car Body in White,
Y. Yang, G. Zhao, D. Ma, and X. Xu, “Mode Calcula- tion and Testing of a Car Body in White,”Shock and Vibration, vol. 18, no. 1-2, pp. 289–298, 2011
2011
-
[19]
ValidationofAu- tomatic Modal Parameter Estimator on a Car Body-in- White,
N.Gioia,P.-J.Daems,andJ.Helsen,“ValidationofAu- tomatic Modal Parameter Estimator on a Car Body-in- White,”inTopics in Modal Analysis & Testing, Volume 8, pp. 279–284, Springer, 2020
2020
-
[20]
Car- Bench: A Comprehensive Benchmark for Neural Sur- rogatesonHighFidelity3DCarAerodynamics,
M. Elrefaie, D. Shu, M. Klenk, and F. Ahmed, “Car- Bench: A Comprehensive Benchmark for Neural Sur- rogatesonHighFidelity3DCarAerodynamics,”arXiv preprint arXiv:2512.07847, 2025
-
[21]
Relational inductive biases, deep learning, and graph networks
P. W. Battaglia, J. B. Hamrick, V. Bapst, A. Sanchez- Gonzalez, V. Zambaldi, M. Malinowski, A. Tacchetti, D. Raposo, A. Santoro, R. Faulkner,et al., “Rela- tional Inductive Biases, Deep Learning, and Graph Networks,”arXiv preprint arXiv:1806.01261, 2018
work page internal anchor Pith review arXiv 2018
-
[22]
Dropout as a Bayesian Approximation: Representing Model Uncertainty in Deep Learning,
Y. Gal and Z. Ghahramani, “Dropout as a Bayesian Approximation: Representing Model Uncertainty in Deep Learning,” inInternational Conference on Ma- chine Learning, pp. 1050–1059, 2016
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.