Recognition: no theorem link
Towards Lifelong Aerial Autonomy: Geometric Memory Management for Continual Visual Place Recognition in Dynamic Environments
Pith reviewed 2026-05-10 18:01 UTC · model grok-4.3
The pith
A heterogeneous memory framework using static satellite anchors and diversity-driven dynamic buffers enables continual aerial visual place recognition across changing environments.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Formulating aerial VPR as domain-incremental learning, the authors show that decoupling into static satellite anchors and a dynamic buffer, with allocation optimized for structural feature diversity, outperforms random baselines by 7.8 percent in retention and delivers order-agnostic robustness, proving that maintaining structural coverage matters more than preserving class means or prioritizing difficult samples.
What carries the argument
The Learn-and-Dispose pipeline that splits geographic knowledge into static satellite anchors preserving global geometric priors and a dynamic experience replay buffer retaining domain-specific features, managed by a spatially-constrained allocation strategy that favors feature diversity.
If this is right
- Maximizing structural feature diversity in the buffer produces a better plasticity-stability balance than class-mean preservation in unstructured environments.
- The architecture delivers spatial generalization improvements while respecting strict onboard storage constraints.
- Performance remains robust across randomized mission sequences without dependence on presentation order.
Where Pith is reading between the lines
- The separation of global geometric priors from local experience could be adapted to other robotic sensing domains that face high intra-class variation, such as ground vehicle navigation.
- Selecting for diversity instead of difficulty may simplify buffer management in any resource-limited continual-learning setting.
- The benchmark criteria provided could serve as a template for evaluating memory methods in other incremental perception tasks.
Load-bearing premise
Existing continual learning methods fail on aerial VPR because of severe intra-class geographic variations, and the static-dynamic split plus diversity allocation will generalize beyond the 21-sequence benchmark.
What would settle it
On a fresh set of aerial mission sequences exhibiting larger environmental shifts, the diversity-driven buffer selection would show no improvement over random allocation or would increase forgetting rates.
Figures





read the original abstract
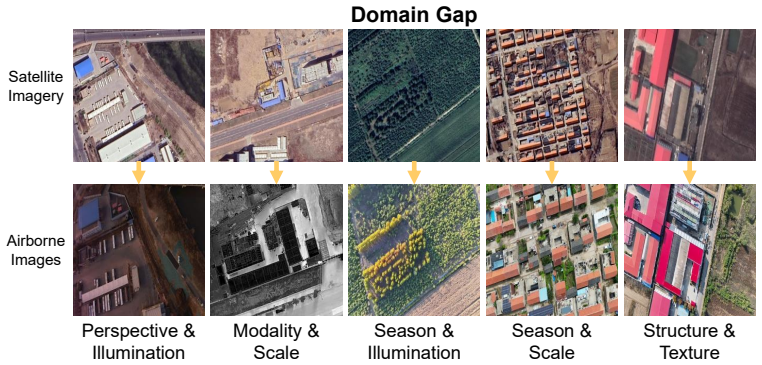
Robust geo-localization in changing environmental conditions is critical for long-term aerial autonomy. While visual place recognition (VPR) models perform well when airborne views match the training domain, adapting them to shifting distributions during sequential missions triggers catastrophic forgetting. Existing continual learning (CL) methods often fail here because geographic features exhibit severe intra-class variations. In this work, we formulate aerial VPR as a mission-based domain-incremental learning (DIL) problem and propose a novel heterogeneous memory framework. To respect strict onboard storage constraints, our "Learn-and-Dispose" pipeline decouples geographic knowledge into static satellite anchors (preserving global geometric priors) and a dynamic experience replay buffer (retaining domain-specific features). We introduce a spatially-constrained allocation strategy that optimizes buffer selection based on sample difficulty or feature space diversity. To facilitate systematic assessment, we provide three evaluation criteria and a comprehensive benchmark derived from 21 diverse mission sequences. Extensive experiments demonstrate that our architecture significantly boosts spatial generalization; our diversity-driven buffer selection outperforms the random baseline by 7.8% in knowledge retention. Unlike class-mean preservation methods that fail in unstructured environments, maximizing structural diversity achieves a superior plasticity-stability balance and ensures order-agnostic robustness across randomized sequences. These results prove that maintaining structural feature coverage is more critical than sample difficulty for resolving catastrophic forgetting in lifelong aerial autonomy.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper formulates aerial visual place recognition (VPR) as a mission-based domain-incremental learning problem and introduces a heterogeneous memory architecture that decouples knowledge into static satellite anchors (global geometric priors) and a dynamic experience replay buffer (domain-specific features). It proposes a spatially-constrained buffer allocation strategy that selects samples by either difficulty or feature-space diversity, introduces three evaluation criteria, and releases a benchmark derived from 21 mission sequences. Experiments claim that the diversity-driven selection outperforms a random baseline by 7.8% in knowledge retention, achieves a better plasticity-stability trade-off than class-mean methods, and is order-agnostic across randomized sequences.
Significance. If the empirical claims hold under rigorous controls, the work would provide a practical, storage-constrained solution for lifelong aerial VPR that prioritizes structural coverage over sample difficulty. The released benchmark and the static-dynamic split could serve as a useful testbed for continual learning in robotics, particularly where onboard memory is limited and geographic variation is high.
major comments (3)
- [Abstract, §4] Abstract and §4 (Experiments): The reported 7.8% retention gain over random and the superiority of diversity over difficulty are presented without statistical significance tests, confidence intervals, exact metric definitions (e.g., recall@K, forgetting measure), or controls for sequence ordering effects. The abstract states results are “order-agnostic across randomized sequences,” yet no quantitative characterization of intra-sequence geographic variation or cross-validation on held-out environments is provided, making it impossible to verify that the delta is caused by structural coverage rather than benchmark artifacts.
- [§3, §4] §3 (Method) and §4: The central claim that “maintaining structural feature coverage is more critical than sample difficulty” rests on a post-hoc comparison within the proposed framework; no ablation isolates whether the spatially-constrained allocation itself (versus standard replay or regularization baselines) drives the improvement, and no comparison against established continual-learning methods (e.g., EWC, GEM, or standard experience replay) on the same 21-sequence data is reported.
- [§2, §4] §2 (Related Work) and §4: The assertion that existing CL methods fail on aerial VPR because of “severe intra-class geographic variations” is not supported by direct experiments on the benchmark; without such controls, the necessity of the static-dynamic split and the 7.8% gain cannot be attributed to the proposed architecture rather than to the particular choice of 21 sequences.
minor comments (2)
- [§3] Notation for the static satellite anchors and dynamic buffer should be introduced with explicit equations rather than descriptive text only.
- [§4] Figure captions and axis labels in the experimental plots should explicitly state the evaluation metric and whether results are averaged over multiple randomizations.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. We address each major comment point by point below, clarifying our contributions where possible and committing to revisions that strengthen the empirical support without altering the core claims.
read point-by-point responses
-
Referee: [Abstract, §4] Abstract and §4 (Experiments): The reported 7.8% retention gain over random and the superiority of diversity over difficulty are presented without statistical significance tests, confidence intervals, exact metric definitions (e.g., recall@K, forgetting measure), or controls for sequence ordering effects. The abstract states results are “order-agnostic across randomized sequences,” yet no quantitative characterization of intra-sequence geographic variation or cross-validation on held-out environments is provided, making it impossible to verify that the delta is caused by structural coverage rather than benchmark artifacts.
Authors: We agree that statistical rigor would improve verifiability. In the revised manuscript we will add paired statistical tests (e.g., Wilcoxon signed-rank) across the randomized sequence runs together with 95% confidence intervals on the retention and forgetting metrics. Exact definitions of recall@K and the forgetting measure will be stated explicitly in §4. For the order-agnostic claim we will report the standard deviation of performance across the multiple random orderings we already executed and include a brief quantitative summary of intra-sequence geographic variation (measured by feature-space spread within each mission). We will also add a held-out environment cross-validation protocol to help attribute gains to structural coverage rather than benchmark idiosyncrasies. revision: yes
-
Referee: [§3, §4] §3 (Method) and §4: The central claim that “maintaining structural feature coverage is more critical than sample difficulty” rests on a post-hoc comparison within the proposed framework; no ablation isolates whether the spatially-constrained allocation itself (versus standard replay or regularization baselines) drives the improvement, and no comparison against established continual-learning methods (e.g., EWC, GEM, or standard experience replay) on the same 21-sequence data is reported.
Authors: We acknowledge that isolating the contribution of the spatially-constrained allocation requires an explicit ablation. We will add a controlled comparison of our allocation strategy against a standard (non-spatially-constrained) experience-replay buffer of identical size. In addition, we will include direct comparisons against EWC, GEM, and vanilla experience replay on the identical 21-sequence benchmark, reporting the same three evaluation criteria. These new results will be placed in an expanded §4 to demonstrate that the heterogeneous static-dynamic architecture, rather than the allocation heuristic alone, accounts for the observed plasticity-stability trade-off. revision: yes
-
Referee: [§2, §4] §2 (Related Work) and §4: The assertion that existing CL methods fail on aerial VPR because of “severe intra-class geographic variations” is not supported by direct experiments on the benchmark; without such controls, the necessity of the static-dynamic split and the 7.8% gain cannot be attributed to the proposed architecture rather than to the particular choice of 21 sequences.
Authors: We accept that direct empirical support for the limitations of prior CL methods on this benchmark is currently missing. In the revision we will run EWC, GEM, and standard experience replay on the 21-sequence data and report their retention and forgetting scores alongside our method. These results will be used to quantify the impact of intra-class geographic variation and to justify the static satellite anchors plus dynamic buffer design. The new experiments will also allow us to discuss whether the 7.8% margin is specific to our benchmark or generalizes. revision: yes
Circularity Check
No significant circularity; empirical benchmark comparison is self-contained
full rationale
The paper frames aerial VPR as a domain-incremental learning problem and introduces a heterogeneous memory framework with static satellite anchors and a dynamic replay buffer using spatially-constrained allocation. Its central claims rest on experimental results: a 7.8% retention gain for diversity-driven selection over random on a new 21-sequence benchmark, plus the conclusion that structural diversity outperforms difficulty-based selection. No equations, fitted parameters, or derivations are shown that reduce these outcomes to self-definitions or inputs by construction. No load-bearing self-citations, uniqueness theorems, or ansatzes imported from prior author work appear in the provided text. The benchmark and metrics are presented as newly introduced evaluation tools, making the reported improvements direct empirical observations rather than circular reductions. This is the expected non-finding for an applied robotics paper whose value is in the experimental comparison itself.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Geographic features exhibit severe intra-class variations that cause existing continual learning methods to fail in aerial VPR.
invented entities (2)
-
static satellite anchors
no independent evidence
-
dynamic experience replay buffer
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Rebuffi, S.A., Kolesnikov, A., Sperl, G., Lampert, C.H., 2017
doi:10.1109/TPAMI.2018.2846566. Rebuffi, S.A., Kolesnikov, A., Sperl, G., Lampert, C.H., 2017. iCaRL: Incremental classifier and representation learning, in: 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 5533–5542. doi:10.1109/CVPR.2017.587. Sattler, T., Maddern, W., Toft, C., Torii, A., Hammarstrand, L., Stenborg, E., Safari...
-
[2]
IEEE Robotics and Automation Letters 3, 1418–1425
Maplab: An open framework for research in visual-inertial mapping and localization. IEEE Robotics and Automation Letters 3, 1418–1425. doi:10.1109/LRA.2018.2800113. Sener, O., Savarese, S., 2018. Active learning for convolutional neural networks: A core- set approach, in: International Conference on Learning Representations. doi:10.48550/ arXiv.1708.00489...
-
[3]
Mapillary street-level sequences: A dataset for lifelong place recognition, in: 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 2623–
2020
-
[4]
doi:10.1109/CVPR42600.2020.00270. Yin, P., Abuduweili, A., Zhao, S., Xu, L., Liu, C., Scherer, S., 2023. BioSLAM: A bioinspired lifelong memory system for general place recognition. IEEE Transactions on Robotics 39, 4855–4874. doi:10.1109/TRO.2023.3306615. Yoon, J., Madaan, D., Yang, E., Hwang, S.J., 2021a. Online coreset selection for rehearsal- based co...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.