Recognition: unknown
GPU-Accelerated Continuous-Time Successive Convexification for Contact-Implicit Legged Locomotion
Pith reviewed 2026-05-10 16:45 UTC · model grok-4.3
The pith
Contact-implicit successive convexification finds legged robot trajectories without fine time grids or predefined contact schedules.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
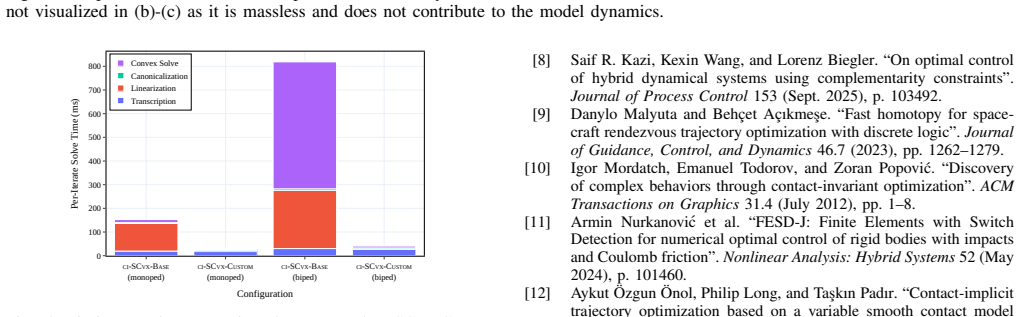
We present contact-implicit successive convexification (ci-SCvx) that models full multibody dynamics with stick-slip friction and partially elastic impacts, enforces contacts via integral cross-complementarity constraints to avoid missed events between nodes, embeds a backtracking homotopy inside SCP for reliable convergence, and implements the solver with JAX GPU acceleration to achieve solve times over an order of magnitude faster than existing SCP methods.
What carries the argument
integral cross-complementarity constraints that integrate contact forces over each interval to guarantee every mode switch is recorded without requiring grid refinement
If this is right
- Legged locomotion tasks can be optimized with automatic discovery of contact sequences rather than manual mode scheduling.
- Solution quality no longer degrades when the time grid is kept coarse, because contacts are enforced continuously.
- Full multibody dynamics with friction and impacts become practical inside real-time trajectory optimization loops.
- The resulting software produces lower-energy torque profiles that still satisfy physics in forward simulation.
Where Pith is reading between the lines
- The GPU-accelerated implementation could support online replanning on physical robots when disturbances occur.
- The same integral constraint pattern may apply to other contact-rich domains such as robotic manipulation or assembly.
- Faster SCP solves open a route to hybrid planners that combine this method with learned policies for long-horizon tasks.
Load-bearing premise
The integral cross-complementarity constraints and backtracking homotopy scheme are assumed to guarantee reliable convergence and accurate capture of all contact events in full multibody dynamics without post-hoc tuning or missed modes.
What would settle it
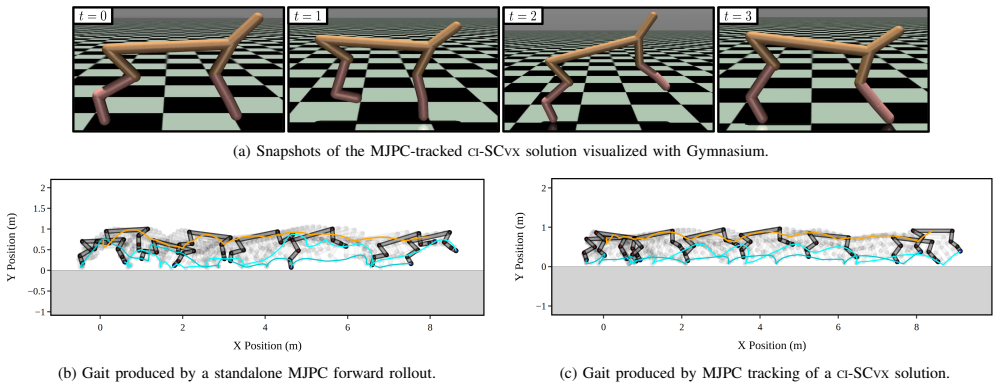
If torque profiles produced by ci-SCvx, when replayed in the Gymnasium HalfCheetah MuJoCo environment, either consume more energy than the MuJoCo MPC baseline or fail to generate trajectories that remain physically consistent without missed contacts, the performance claims would be disproved.
Figures



read the original abstract
Contact-implicit trajectory optimization (CITO) enables the automatic discovery of contact sequences, but most methods rely on fine time discretization to capture all contact events accurately, which increases problem size and runtime while tying solution quality to grid resolution. We extend the recently proposed sequential convex programming (SCP) approach for trajectory optimization, continuous-time successive convexification (ct-SCvx), to CITO by introducing integral cross-complementarity constraints, which eliminate the risk of missing contact events between discretization nodes while preserving the flexibility of contact mode changes. The resulting framework, contact-implicit successive convexification (ci-SCvx), models full multibody dynamics in maximal coordinates, including stick-slip friction and partially elastic impacts. To handle complementarity constraints, we embed a backtracking homotopy scheme within SCP for reliable convergence. We implement this framework in a stand-alone Python software, leveraging JAX for GPU acceleration and a custom canonical-form parser for the convex subproblems of SCP to avoid the overhead of general-purpose modeling tools such as CVXPY. We demonstrate ci-SCvx on diverse legged-locomotion tasks. In particular, we validate the approach in MuJoCo with the Gymnasium HalfCheetah model against the MuJoCo MPC baseline, showing that a tracking simulation with the optimized torque profiles from ci-SCvx produces physically consistent trajectories with lesser energy consumption. We also show that the resulting software achieves faster solve times than existing state-of-the-art SCP implementations by over an order of magnitude, thereby demonstrating a practically important contribution to scalable real-time trajectory optimization.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript extends continuous-time successive convexification (ct-SCvx) to contact-implicit trajectory optimization (CITO) by introducing integral cross-complementarity constraints and an embedded backtracking homotopy scheme, yielding contact-implicit successive convexification (ci-SCvx). The framework models full multibody dynamics in maximal coordinates, including stick-slip friction and partially elastic impacts. It is implemented as a stand-alone Python package using JAX for GPU acceleration and a custom canonical-form parser to avoid CVXPY overhead. Validation is shown on legged locomotion tasks, with a specific comparison on the Gymnasium HalfCheetah model in MuJoCo against an MPC baseline, reporting physically consistent trajectories, lower energy consumption, and solve times faster by over an order of magnitude than existing SCP methods.
Significance. If the convergence and contact-capture claims hold, the work provides a practically useful contribution to scalable real-time trajectory optimization for contact-rich systems. Explicit strengths include the GPU-accelerated implementation, the custom parser for SCP subproblems, and the direct validation against a standard MuJoCo MPC baseline showing energy and timing improvements. These elements support the claim of a practically important advance beyond prior ct-SCvx methods.
major comments (2)
- [§4.2 and §4.3] §4.2 (integral cross-complementarity constraints) and §4.3 (backtracking homotopy): the central claim that these elements guarantee reliable convergence and faithful capture of all stick-slip/impact events in maximal-coordinate multibody dynamics without missed modes or manual tuning lacks a formal guarantee, exhaustive mode-enumeration check, or sensitivity analysis. This is load-bearing for the reliability assertion in the abstract and validation claims.
- [§5.2] §5.2 (MuJoCo HalfCheetah validation): the reported lower energy consumption and physical consistency are presented without details on experimental controls, quantitative error metrics for trajectory matching, number of trials, or any observed homotopy convergence failures. This weakens the strength of the empirical support for the framework's advantages over the MPC baseline.
minor comments (2)
- [Abstract] Abstract: the phrase 'over an order of magnitude' faster solve times should name the specific state-of-the-art SCP baselines used for the timing comparison.
- [§3] Notation for the integral cross-complementarity constraints could be clarified with an explicit definition of the integration limits relative to the discretization nodes.
Simulated Author's Rebuttal
We thank the referee for their constructive comments on our manuscript. We address each of the major comments in detail below and indicate the revisions we have made or plan to make.
read point-by-point responses
-
Referee: [§4.2 and §4.3] §4.2 (integral cross-complementarity constraints) and §4.3 (backtracking homotopy): the central claim that these elements guarantee reliable convergence and faithful capture of all stick-slip/impact events in maximal-coordinate multibody dynamics without missed modes or manual tuning lacks a formal guarantee, exhaustive mode-enumeration check, or sensitivity analysis. This is load-bearing for the reliability assertion in the abstract and validation claims.
Authors: We acknowledge that the manuscript does not include a formal mathematical guarantee of convergence or an exhaustive enumeration of all possible contact modes. Providing such a guarantee for general multibody systems with friction and impacts is beyond the scope of this work and remains an open research question. Our contributions focus on the practical integration of integral cross-complementarity constraints to avoid missed events and the embedded backtracking homotopy for handling the resulting nonconvex subproblems. To address the concern regarding sensitivity analysis and mode capture, we will add a sensitivity analysis on the homotopy parameters and results from a simplified planar multibody system with exhaustive mode enumeration in the revised manuscript. We maintain that the integral cross-complementarity constraints and backtracking homotopy provide practical reliability, as evidenced by the successful solutions in the legged locomotion examples without missed modes or manual tuning. revision: partial
-
Referee: [§5.2] §5.2 (MuJoCo HalfCheetah validation): the reported lower energy consumption and physical consistency are presented without details on experimental controls, quantitative error metrics for trajectory matching, number of trials, or any observed homotopy convergence failures. This weakens the strength of the empirical support for the framework's advantages over the MPC baseline.
Authors: We agree with the referee that additional details would improve the clarity and strength of the validation section. In the revised manuscript, we have expanded §5.2 to include details on the number of trials, quantitative error metrics for trajectory matching (such as RMSE), the experimental controls employed, and confirmation that no homotopy convergence failures were observed in the experiments. These additions provide a more robust basis for the claims of physical consistency and performance improvements over the MPC baseline. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper extends the prior ct-SCvx SCP framework by adding integral cross-complementarity constraints and an embedded backtracking homotopy scheme for contact-implicit problems. No step reduces a claimed prediction or result to a fitted parameter, self-definition, or unverified self-citation by construction; the central formulation is presented as a direct augmentation of the referenced continuous-time SCP method, with external validation against MuJoCo MPC providing independent benchmarking. The derivation remains self-contained against the stated assumptions and does not rely on renaming, ansatz smuggling, or uniqueness theorems imported from the same authors.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Integral cross-complementarity constraints eliminate the risk of missing contact events between discretization nodes.
- domain assumption Backtracking homotopy scheme ensures reliable convergence for complementarity constraints.
Reference graph
Works this paper leans on
-
[1]
MPEC strategies for optimiza- tion of a class of hybrid dynamic systems
B.T. Baumrucker and L.T. Biegler. “MPEC strategies for optimiza- tion of a class of hybrid dynamic systems”.Journal of Process Control19.8 (Sept. 2009), pp. 1248–1256
2009
-
[2]
QOCO: A quadratic objec- tive conic optimizer with custom solver generation
Govind M Chari and Behçet Açikme¸ se. “QOCO: A quadratic objec- tive conic optimizer with custom solver generation”.arXiv preprint arXiv:2503.12658(2025)
-
[3]
Continuous-time successive convexification for constrained trajectory optimization
Purnanand Elango et al. “Continuous-time successive convexification for constrained trajectory optimization”.Automatica180 (Oct. 2025), p. 112464
2025
-
[4]
A sequential convex programming approach to solving quadratic programs and optimal control problems with linear complementarity constraints
Jonas Hall et al. “A sequential convex programming approach to solving quadratic programs and optimal control problems with linear complementarity constraints”.IEEE Control Systems Letters6 (2021), pp. 536–541
2021
-
[5]
Continuous-Time Line-of-Sight Con- strained Trajectory Planning for 6-Degree of Freedom Systems
Christopher R Hayner et al. “Continuous-Time Line-of-Sight Con- strained Trajectory Planning for 6-Degree of Freedom Systems”. IEEE Robotics and Automation Letters(2025)
2025
-
[6]
Predictive sampling: Real-time behaviour synthesis with mujoco,
Taylor Howell et al. “Predictive sampling: Real-time behaviour synthesis with MuJoCo”.arXiv preprint arXiv:2212.00541(2022)
-
[7]
Real-Time Sequential Conic Optimization for Multi-Phase Rocket Landing Guidance
Abhinav G Kamath et al. “Real-Time Sequential Conic Optimization for Multi-Phase Rocket Landing Guidance”.IFAC-PapersOnLine 56.2 (2023), pp. 3118–3125
2023
-
[8]
On optimal control of hybrid dynamical systems using complementarity constraints
Saif R. Kazi, Kexin Wang, and Lorenz Biegler. “On optimal control of hybrid dynamical systems using complementarity constraints”. Journal of Process Control153 (Sept. 2025), p. 103492
2025
-
[9]
Fast homotopy for space- craft rendezvous trajectory optimization with discrete logic
Danylo Malyuta and Behçet Açıkme¸ se. “Fast homotopy for space- craft rendezvous trajectory optimization with discrete logic”.Journal of Guidance, Control, and Dynamics46.7 (2023), pp. 1262–1279
2023
-
[10]
Discovery of complex behaviors through contact-invariant optimization
Igor Mordatch, Emanuel Todorov, and Zoran Popovi ´c. “Discovery of complex behaviors through contact-invariant optimization”.ACM Transactions on Graphics31.4 (July 2012), pp. 1–8
2012
-
[11]
FESD-J: Finite Elements with Switch Detection for numerical optimal control of rigid bodies with impacts and Coulomb friction
Armin Nurkanovi ´c et al. “FESD-J: Finite Elements with Switch Detection for numerical optimal control of rigid bodies with impacts and Coulomb friction”.Nonlinear Analysis: Hybrid Systems52 (May 2024), p. 101460
2024
-
[12]
Contact-implicit trajectory optimization based on a variable smooth contact model and successive convexification
Aykut Özgun Önol, Philip Long, and Ta¸ skın Padır. “Contact-implicit trajectory optimization based on a variable smooth contact model and successive convexification”.2019 International Conference on Robotics and Automation (ICRA). IEEE. 2019, pp. 2447–2453
2019
-
[13]
Tuning-free contact-implicit trajectory optimization
Aykut Özgun Önol et al. “Tuning-free contact-implicit trajectory optimization”.2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE. 2020, pp. 1183–1189
2020
-
[14]
Centroidal dynamics of a humanoid robot
David E. Orin, Ambarish Goswami, and Sung-Hee Lee. “Centroidal dynamics of a humanoid robot”.Autonomous Robots35.2–3 (June 2013), pp. 161–176
2013
-
[15]
Contact-Implicit Trajectory Optimization Using Orthogonal Collocation
Amir Patel et al. “Contact-Implicit Trajectory Optimization Using Orthogonal Collocation”.IEEE Robotics and Automation Letters4.2 (Apr. 2019), pp. 2242–2249
2019
-
[16]
A direct method for trajectory optimization of rigid bodies through contact
Michael Posa, Cecilia Cantu, and Russ Tedrake. “A direct method for trajectory optimization of rigid bodies through contact”.The Inter- national Journal of Robotics Research33.1 (Oct. 2013), pp. 69–81
2013
-
[17]
Numerical simulation methods for embedded opti- mization
Rien Quirynen. “Numerical simulation methods for embedded opti- mization”. PhD thesis. KU Leuven, 2017
2017
-
[18]
Stewart.Dynamics with Inequalities: Impacts and Hard Constraints
David E. Stewart.Dynamics with Inequalities: Impacts and Hard Constraints. V ol. 123. Other Titles in Applied Mathematics. Philadel- phia, PA: Society for Industrial and Applied Mathematics, 2011. ISBN: 978-1-61197-070-8
2011
-
[19]
Gymnasium: A Standard Interface for Reinforcement Learning Environments
Mark Towers et al. “Gymnasium: A standard interface for rein- forcement learning environments”.arXiv preprint arXiv:2407.17032 (2024)
work page internal anchor Pith review arXiv 2024
-
[20]
Optimization-Based Control for Dynamic Legged Robots
Patrick M. Wensing et al. “Optimization-Based Control for Dynamic Legged Robots”.IEEE Transactions on Robotics40 (2024), pp. 43– 63
2024
-
[21]
Gait and Trajectory Optimization for Legged Systems Through Phase-Based End-Effector Parameter- ization
Alexander W. Winkler et al. “Gait and Trajectory Optimization for Legged Systems Through Phase-Based End-Effector Parameter- ization”.IEEE Robotics and Automation Letters3.3 (July 2018), pp. 1560–1567
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.