A Ray Intersection Algorithm for Fast Growth Distance Computation Between Convex Sets
Pith reviewed 2026-05-10 16:19 UTC · model grok-4.3
The pith
A ray intersection algorithm computes growth distance between convex sets by approximating their Minkowski difference with polyhedra.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We reduce the growth distance problem to an equivalent ray intersection problem on the Minkowski difference set. We then propose an algorithm to solve the ray intersection problem by iteratively constructing inner and outer polyhedral approximations of the Minkowski difference set. This algorithm satisfies primal and dual feasibility and monotone convergence.
What carries the argument
Iterative construction of inner and outer polyhedral approximations to the Minkowski difference set for solving the ray intersection problem.
If this is right
- The algorithm maintains primal and dual feasibility in all iterations.
- The approximations converge monotonically to the solution.
- Benchmark results show state-of-the-art performance on a wide variety of convex sets.
- The method supports applications in motion planning and rigid-body simulation.
Where Pith is reading between the lines
- The open-source implementation can be used to benchmark against new convex set representations.
- This method could inspire similar approximation techniques for other distance measures in computational geometry.
- For robotics, faster growth distance might improve real-time collision avoidance in dynamic environments.
Load-bearing premise
The convex sets have compact shapes and their support functions can be represented in a form that allows polyhedral approximation.
What would settle it
A test case with two convex sets where the computed growth distance does not match the value obtained from a different reliable method, such as for two axis-aligned boxes.
Figures





read the original abstract
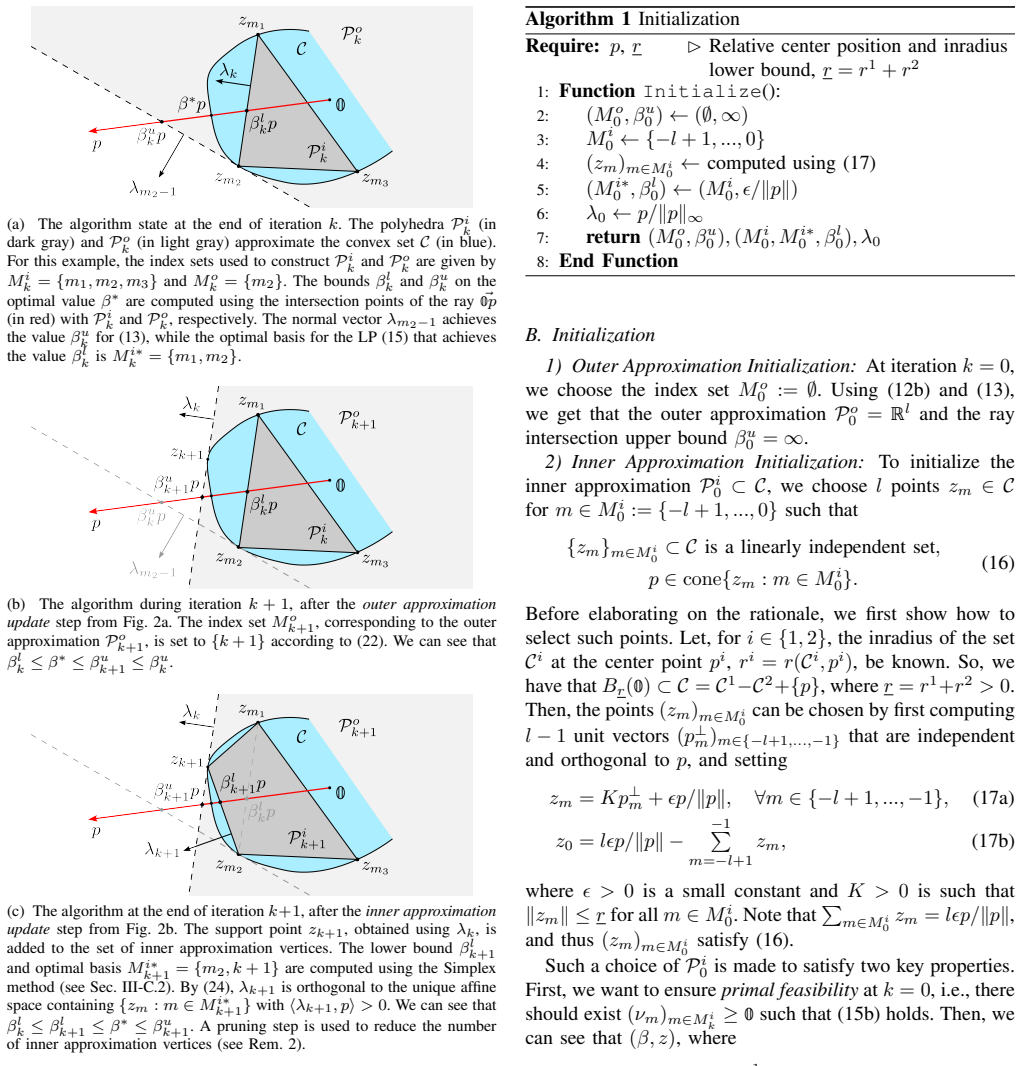
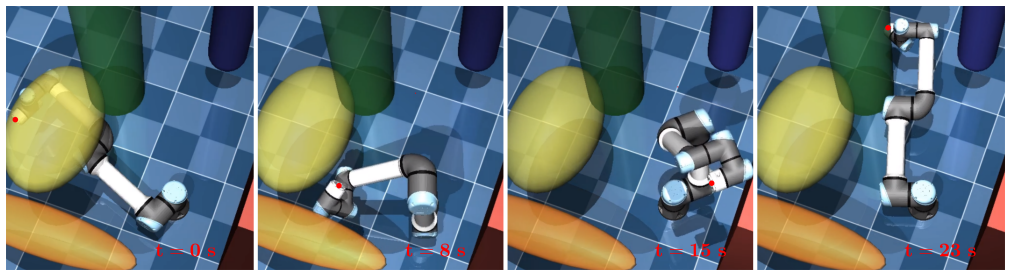
In this paper, we discuss an efficient algorithm for computing the growth distance between two compact convex sets with representable support functions. The growth distance between two sets is the minimum scaling factor such that the sets intersect when scaled about some center points. Unlike the minimum distance between sets, the growth distance provides a unified measure for set intersection and separation. We first reduce the growth distance problem to an equivalent ray intersection problem on the Minkowski difference set. Then, we propose an algorithm to solve the ray intersection problem by iteratively constructing inner and outer polyhedral approximations of the Minkowski difference set. We show that our algorithm satisfies several key properties, such as primal and dual feasibility and monotone convergence. We provide extensive benchmark results for our algorithm and show that our open-source implementation achieves state-of-the-art performance across a wide variety of convex sets. Finally, we demonstrate robotics applications of our algorithm in motion planning and rigid-body simulation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an algorithm for computing the growth distance between two compact convex sets with representable support functions. It reduces the problem to an equivalent ray intersection problem on the Minkowski difference set, then solves it by iteratively constructing inner and outer polyhedral approximations. The authors assert that the algorithm satisfies primal-dual feasibility and monotone convergence, provide benchmark results claiming state-of-the-art performance with an open-source implementation, and demonstrate applications in motion planning and rigid-body simulation.
Significance. If the reduction to ray intersection, convergence properties, and performance claims hold, the work could provide an efficient alternative for unified intersection/separation measures in robotics, complementing methods like GJK and EPA. The open-source implementation and extensive benchmarks across convex sets are positive features that support reproducibility.
major comments (2)
- [Abstract and §4 (Benchmarks)] Abstract and performance evaluation section: the state-of-the-art performance claim depends on repeated support function evaluations of the input sets, but no analysis, bounds, or verification is provided on the computational cost of these oracles for the 'wide variety' of tested convex sets. If oracle evaluation requires numerical optimization (as is common for non-polyhedral bodies), the per-iteration cost may dominate and the advantage over existing methods is not established by the ray-intersection procedure alone.
- [§3 (Algorithm)] Algorithm description section: primal-dual feasibility and monotone convergence are asserted for the iterative polyhedral approximation scheme, but no derivation steps, error analysis for approximate oracles, or handling of numerical precision in ray intersections are supplied. These properties are load-bearing for the central claims yet cannot be verified from the given material.
minor comments (2)
- [Notation and preliminaries] Ensure all notation for scaling factors, centers, and Minkowski difference is introduced consistently before first use.
- [§4 (Benchmarks)] Benchmark tables would benefit from explicit reporting of support function evaluation times to allow readers to assess the oracle cost contribution.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and outline the revisions we will make to strengthen the presentation of our results.
read point-by-point responses
-
Referee: [Abstract and §4 (Benchmarks)] Abstract and performance evaluation section: the state-of-the-art performance claim depends on repeated support function evaluations of the input sets, but no analysis, bounds, or verification is provided on the computational cost of these oracles for the 'wide variety' of tested convex sets. If oracle evaluation requires numerical optimization (as is common for non-polyhedral bodies), the per-iteration cost may dominate and the advantage over existing methods is not established by the ray-intersection procedure alone.
Authors: We agree that the performance claims are empirical and rely on the efficiency of the support-function oracles for the specific convex sets in our benchmarks. For the tested families (polytopes, ellipsoids, zonotopes, and superellipsoids), the oracles admit closed-form or low-cost evaluations, and our reported timings reflect total wall-clock time including oracle calls. The algorithm's contribution is to minimize the number of such calls while guaranteeing primal-dual feasibility. We will add a dedicated paragraph in §4 that tabulates the per-call cost of each oracle used, cites the relevant closed-form expressions, and explicitly notes that for bodies whose support functions require iterative numerical optimization the per-iteration overhead must be considered separately. This addition will clarify the scope of the state-of-the-art claim without altering the reported benchmark numbers. revision: partial
-
Referee: [§3 (Algorithm)] Algorithm description section: primal-dual feasibility and monotone convergence are asserted for the iterative polyhedral approximation scheme, but no derivation steps, error analysis for approximate oracles, or handling of numerical precision in ray intersections are supplied. These properties are load-bearing for the central claims yet cannot be verified from the given material.
Authors: We acknowledge that the current manuscript states these properties without supplying the full derivation or numerical-stability discussion. In the revised version we will expand §3 with a self-contained subsection that (i) derives primal-dual feasibility from the supporting-hyperplane construction at each iteration, (ii) proves monotone convergence of the inner and outer approximations to the true ray-intersection point under exact oracles, and (iii) provides a first-order error bound when the support-function oracle is only approximate. We will also add a short paragraph on floating-point handling of the ray-intersection test, referencing the robust predicate techniques already present in our open-source implementation. These additions will make the theoretical claims verifiable from the text. revision: yes
Circularity Check
No circularity: derivation reduces growth distance to independent ray-intersection reformulation with proven convergence properties
full rationale
The paper's core chain begins with an explicit geometric reduction of growth distance to ray intersection on the Minkowski difference, followed by an iterative polyhedral approximation algorithm whose feasibility and monotone convergence are shown directly from the construction. No equation equates a claimed result to a fitted parameter or self-referential definition, and no load-bearing step relies on a self-citation whose content is unverified. Benchmarks are presented as empirical validation rather than part of the derivation. The support-function oracle assumption is stated as a problem-class precondition but does not render the algorithm tautological.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The input sets are compact and convex with representable support functions
Reference graph
Works this paper leans on
-
[1]
Distance functions and their application to robot path planning in the presence of obstacles,
E. Gilbert and D. Johnson, “Distance functions and their application to robot path planning in the presence of obstacles,”IEEE Journal on Robotics and Automation, vol. 1, no. 1, pp. 21–30, 2003
work page 2003
-
[2]
Real-time (self)-collision avoidance task on a hrp-2 humanoid robot,
O. Stasse, A. Escande, N. Mansard, S. Miossec, P. Evrard, and A. Kheddar, “Real-time (self)-collision avoidance task on a hrp-2 humanoid robot,” in2008 ieee international conference on robotics and automation. IEEE, 2008, pp. 3200–3205
work page 2008
-
[3]
Motion planning with sequential convex optimization and convex collision checking,
J. Schulman, Y . Duan, J. Ho, A. Lee, I. Awwal, H. Bradlow, J. Pan, S. Patil, K. Goldberg, and P. Abbeel, “Motion planning with sequential convex optimization and convex collision checking,”The International Journal of Robotics Research, vol. 33, no. 9, pp. 1251–1270, 2014
work page 2014
-
[4]
Hpp: A new software for constrained motion planning,
J. Mirabel, S. Tonneau, P. Fernbach, A.-K. Sepp ¨al¨a, M. Campana, N. Mansard, and F. Lamiraux, “Hpp: A new software for constrained motion planning,” in2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2016, pp. 383–389
work page 2016
-
[5]
Van Den Bergen,Collision detection in interactive 3D environ- ments
G. Van Den Bergen,Collision detection in interactive 3D environ- ments. CRC Press, 2003
work page 2003
-
[6]
Mujoco: A physics engine for model-based control,
E. Todorov, T. Erez, and Y . Tassa, “Mujoco: A physics engine for model-based control,” in2012 IEEE/RSJ international conference on intelligent robots and systems. IEEE, 2012, pp. 5026–5033
work page 2012
-
[7]
Ericson,Real-time collision detection
C. Ericson,Real-time collision detection. Crc Press, 2004
work page 2004
-
[8]
Approximate convex decompo- sition for 3d meshes with collision-aware concavity and tree search,
X. Wei, M. Liu, Z. Ling, and H. Su, “Approximate convex decompo- sition for 3d meshes with collision-aware concavity and tree search,” ACM Transactions on Graphics (TOG), vol. 41, no. 4, pp. 1–18, 2022
work page 2022
-
[9]
A fast procedure for computing the distance between complex objects in three space,
E. Gilbert, D. Johnson, and S. Keerthi, “A fast procedure for computing the distance between complex objects in three space,” inProceedings. 1987 IEEE International Conference on Robotics and Automation, vol. 4. IEEE, 1987, pp. 1883–1889
work page 1987
-
[10]
Enhancing gjk: Computing minimum and penetration distances between convex polyhedra,
S. Cameron, “Enhancing gjk: Computing minimum and penetration distances between convex polyhedra,” inProceedings of international conference on robotics and automation, vol. 4. IEEE, 1997, pp. 3112–3117
work page 1997
-
[11]
A fast procedure for computing the distance between complex objects in three-dimensional space,
E. G. Gilbert, D. W. Johnson, and S. S. Keerthi, “A fast procedure for computing the distance between complex objects in three-dimensional space,”IEEE Journal on Robotics and Automation, vol. 4, no. 2, pp. 193–203, 2002
work page 2002
-
[12]
Improving the gjk algorithm for faster and more reliable distance queries between convex objects,
M. Montanari, N. Petrinic, and E. Barbieri, “Improving the gjk algorithm for faster and more reliable distance queries between convex objects,”ACM Transactions on Graphics (TOG), vol. 36, no. 3, pp. 1–17, 2017
work page 2017
-
[13]
Gjk++: Leveraging acceleration methods for faster collision detection,
L. Montaut, Q. Le Lidec, V . Petrik, J. Sivic, and J. Carpentier, “Gjk++: Leveraging acceleration methods for faster collision detection,”IEEE Transactions on Robotics, 2024
work page 2024
-
[14]
Proximity queries and penetration depth compu- tation on 3d game objects,
G. Van Den Bergen, “Proximity queries and penetration depth compu- tation on 3d game objects,” inGame developers conference, vol. 170, 2001, p. 209. 13
work page 2001
-
[15]
Growth distances: New measures for object separation and penetration,
C. J. Ong and E. G. Gilbert, “Growth distances: New measures for object separation and penetration,”IEEE Transactions on Robotics and Automation, vol. 12, no. 6, pp. 888–903, 1996
work page 1996
-
[16]
A fast n-dimensional ray- shooting algorithm for grasping force optimization,
Y . Zheng, M. C. Lin, and D. Manocha, “A fast n-dimensional ray- shooting algorithm for grasping force optimization,” in2010 IEEE International Conference on Robotics and Automation, 2010, pp. 1300–1305
work page 2010
-
[17]
Uncertain Pose Estimation during Contact Tasks using Differentiable Contact Features,
D. Lee, J. Lee, and M. Lee, “Uncertain Pose Estimation during Contact Tasks using Differentiable Contact Features,” inProceedings of Robotics: Science and Systems, Daegu, Republic of Korea, July 2023
work page 2023
-
[18]
A fast growth distance algorithm for incremental motions,
C.-J. Ong, E. Huang, and S.-M. Hong, “A fast growth distance algorithm for incremental motions,”IEEE Transactions on Robotics and Automation, vol. 16, no. 6, pp. 880–890, 2000
work page 2000
-
[19]
Differentiable collision detection for a set of convex primitives,
K. Tracy, T. A. Howell, and Z. Manchester, “Differentiable collision detection for a set of convex primitives,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 3663–3670
work page 2023
-
[20]
A fast procedure for computing incremental growth distances,
S.-M. Hong, J.-H. Yeo, and H.-W. Park, “A fast procedure for computing incremental growth distances,”Robotica, vol. 18, no. 4, pp. 429–441, 2000
work page 2000
-
[21]
Ray-shooting algorithms for robotics,
Y . Zheng and K. Yamane, “Ray-shooting algorithms for robotics,” IEEE Transactions on Automation Science and Engineering, vol. 10, no. 4, pp. 862–874, 2013
work page 2013
-
[22]
Ray casting against general convex objects with application to continuous collision detection,
G. A. B. Van and D. Bergen, “Ray casting against general convex objects with application to continuous collision detection,” inPlaylogic Game Factory, 2004. [Online]. Available: https: //api.semanticscholar.org/CorpusID:13230913
work page 2004
-
[23]
A numerical solution to the ray-shooting problem and its applications in robotic grasping,
Y . Zheng and C.-M. Chew, “A numerical solution to the ray-shooting problem and its applications in robotic grasping,” in2009 IEEE International Conference on Robotics and Automation, 2009, pp. 2080–2085
work page 2009
-
[24]
Path connectivity of the free space,
A. Rodriguez and M. T. Mason, “Path connectivity of the free space,” IEEE Transactions on Robotics, vol. 28, no. 5, pp. 1177–1180, 2012
work page 2012
-
[25]
R. T. Rockafellar,Convex analysis. Princeton university press, 1997, vol. 11
work page 1997
-
[26]
Nemirovski,Introduction to linear optimization
A. Nemirovski,Introduction to linear optimization. World Scientific, 2024
work page 2024
- [27]
-
[28]
Yale-cmu-berkeley dataset for robotic manipulation research,
B. Calli, A. Singh, J. Bruce, A. Walsman, K. Konolige, S. Srini- vasa, P. Abbeel, and A. M. Dollar, “Yale-cmu-berkeley dataset for robotic manipulation research,”The International Journal of Robotics Research, vol. 36, no. 3, pp. 261–268, 2017
work page 2017
-
[29]
The quickhull algorithm for convex hulls,
C. B. Barber, D. P. Dobkin, and H. Huhdanpaa, “The quickhull algorithm for convex hulls,”ACM Transactions on Mathematical Software (TOMS), vol. 22, no. 4, pp. 469–483, 1996
work page 1996
-
[30]
E. Coumans, “Bullet physics simulation,” inACM SIGGRAPH 2015 Courses, ser. SIGGRAPH ’15. New York, NY , USA: Association for Computing Machinery, 2015. [Online]. Available: https://doi.org/10.1145/2776880.2792704
-
[31]
The Open Motion Planning Library,
I. A. S ¸ucan, M. Moll, and L. E. Kavraki, “The Open Motion Planning Library,”IEEE Robotics & Automation Magazine, vol. 19, no. 4, pp. 72–82, December 2012, https://ompl.kavrakilab.org
work page 2012
-
[32]
MuJoCo Menagerie: A collection of high-quality simulation models for Mu- JoCo,
K. Zakka, Y . Tassa, and MuJoCo Menagerie Contributors, “MuJoCo Menagerie: A collection of high-quality simulation models for Mu- JoCo,” http://github.com/google-deepmind/mujoco menagerie, 2022
work page 2022
-
[33]
J. Carpentier, G. Saurel, G. Buondonno, J. Mirabel, F. Lamiraux, O. Stasse, and N. Mansard, “The Pinocchio C++ library – A fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives,” inInternational Symposium on System Integration (SII), 2019. 14
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.