Recognition: unknown
A Minimal Mathematical Model for Conducting Patterns
Pith reviewed 2026-05-10 15:33 UTC · model grok-4.3
The pith
A minimal model represents conducting gestures as cycles of preparation and ictus points joined by cubic segments with a quintic timing law.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
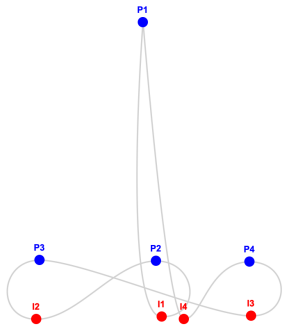
The central claim is that conducting patterns admit a minimal representation consisting of a cyclic sequence of preparation and ictus points connected by cubic Hermite segments whose tangents are constrained to be horizontal, together with a quintic timing law that governs acceleration and deceleration along the path, where one parameter sets the degree of expressive variation from uniform motion.
What carries the argument
The key mechanism is the separation of the geometric trajectory, defined by preparation and ictus points with cubic Hermite interpolation and horizontal tangent constraints, from the temporal parametrization given by a quintic timing law with a single expressiveness parameter.
Load-bearing premise
The assumption that real conducting gestures are adequately captured by cyclic sequences of preparation and ictus points joined by cubic Hermite segments with horizontal tangents and timed by a quintic law with one parameter.
What would settle it
High-speed video of conductors performing standard patterns could be compared directly to the model's generated paths and velocity curves to check for systematic mismatches in shape or acceleration profile.
Figures


read the original abstract
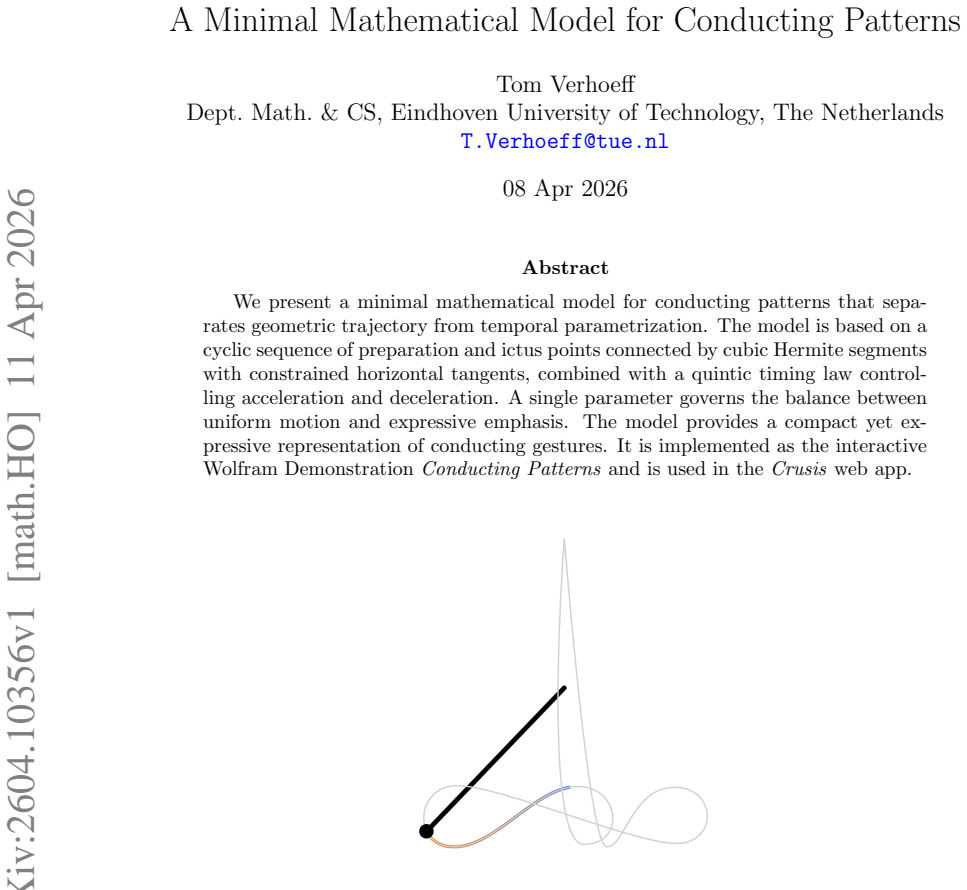
We present a minimal mathematical model for conducting patterns that separates geometric trajectory from temporal parametrization. The model is based on a cyclic sequence of preparation and ictus points connected by cubic Hermite segments with constrained horizontal tangents, combined with a quintic timing law controlling acceleration and deceleration. A single parameter governs the balance between uniform motion and expressive emphasis. The model provides a compact yet expressive representation of conducting gestures. It is implemented as the interactive Wolfram Demonstration "Conducting Patterns" and is used in the Crusis web app.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
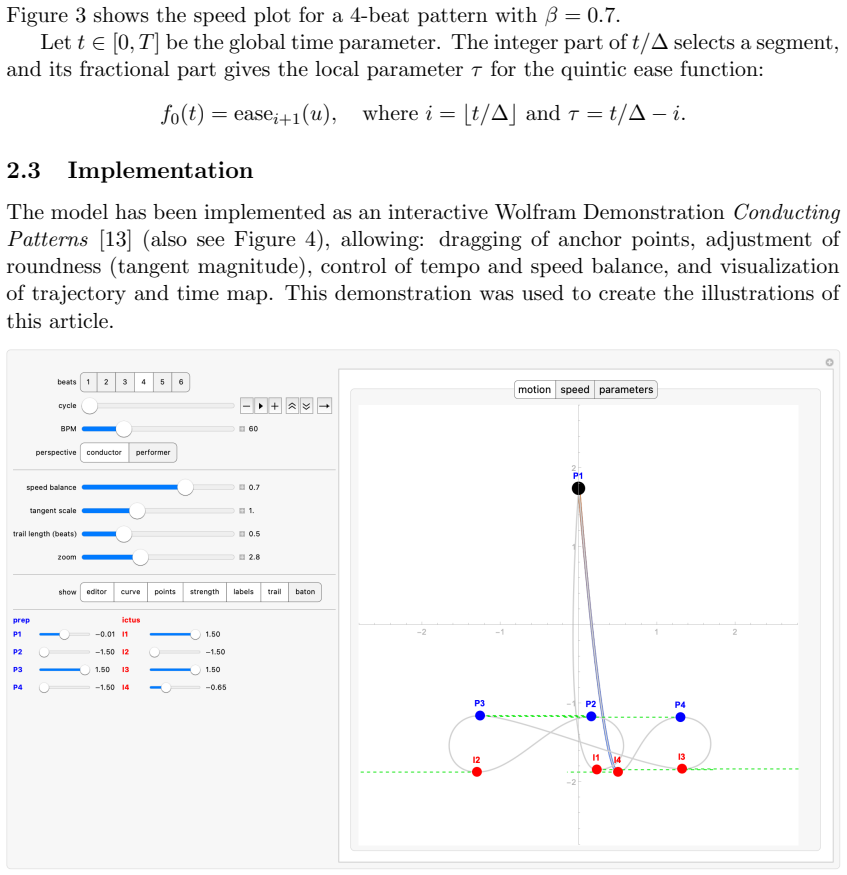
Summary. The paper introduces a minimal mathematical model for conducting patterns that separates the geometric trajectory from the temporal parametrization. It uses a cyclic sequence of preparation and ictus points connected by cubic Hermite segments with horizontal tangent constraints, combined with a quintic timing law controlled by a single expressiveness parameter that balances uniform and accented motion. The model is presented as compact and expressive, with an implementation in the Wolfram Demonstration 'Conducting Patterns' and application in the Crusis web app.
Significance. Should the construction prove as described, it offers a simple, reproducible parametric representation of conducting gestures that could be valuable for computational musicology, animation, and educational tools. The explicit use of standard primitives (cubic Hermite splines and quintic polynomials) and the provision of working code enhance the model's accessibility and verifiability, directly supporting the claim of compactness without requiring data fitting.
minor comments (2)
- [Abstract] The abstract could more precisely state the range of the single free parameter and its effect on the timing law to better convey the model's expressiveness.
- [Implementation] While the Wolfram implementation is mentioned, including a brief description of how the model parameters map to the interactive controls would aid readers in reproducing the gestures.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our manuscript and the recommendation to accept. We are pleased that the separation of geometry and timing, the use of standard primitives, and the accessibility via code and demonstrations were viewed favorably.
Circularity Check
No significant circularity in constructive model definition
full rationale
The paper presents an explicit parametric construction for conducting gestures: a cyclic sequence of preparation and ictus points joined by cubic Hermite segments (with horizontal tangent constraints) driven by a quintic timing law with one free parameter. The central claim—that this yields a compact, expressive representation—is satisfied directly by the existence and reproducibility of the construction itself (including the Wolfram implementation). No predictions are derived from data fits, no quantities are defined in terms of themselves, and no self-citations or uniqueness theorems are invoked to justify the model. The derivation chain is therefore self-contained and non-circular.
Axiom & Free-Parameter Ledger
free parameters (1)
- expressiveness parameter
axioms (1)
- domain assumption Conducting gestures consist of cyclic sequences of preparation and ictus points connected by cubic Hermite segments with constrained horizontal tangents.
Reference graph
Works this paper leans on
-
[1]
Atherton,Vertical Plane Focal Point Conducting, Ball State University, Muncie, IN, 1989
L. Atherton,Vertical Plane Focal Point Conducting, Ball State University, Muncie, IN, 1989
1989
-
[2]
Baumeister,Conducting Patterns 2/4, 4/4, 3/4, 6/8 Time Signature Basics [video], YouTube,https://youtu.be/cfPoxZeOXjg, 2024
A. Baumeister,Conducting Patterns 2/4, 4/4, 3/4, 6/8 Time Signature Basics [video], YouTube,https://youtu.be/cfPoxZeOXjg, 2024
2024
-
[3]
Time-Optimal Control of Robotic Manipula- tors Along Specified Paths,
J. Bobrow, S. Dubowsky, J. Gibson, “Time-Optimal Control of Robotic Manipula- tors Along Specified Paths,”International Journal of Robotics Research,4(3):3–17, 1985
1985
-
[4]
A Class of Local Interpolating Splines,
E. Catmull, R. Rom, “A Class of Local Interpolating Splines,” inComputer Aided Geometric Design, 1974
1974
-
[5]
Farin,Curves and Surfaces for Computer-Aided Geometric Design, Academic Press, 2002
G. Farin,Curves and Surfaces for Computer-Aided Geometric Design, Academic Press, 2002
2002
-
[6]
Ensemble musicians’ synchronization with conductors,
R. Luck, P. Toiviainen, “Ensemble musicians’ synchronization with conductors,” Music Perception, 24(2), 2006
2006
-
[7]
Marrin Nakra,Inside the Conductor’s Jacket, PhD thesis, MIT, 2000
T. Marrin Nakra,Inside the Conductor’s Jacket, PhD thesis, MIT, 2000
2000
-
[8]
Force & Motion: Conducting to the Click,
R. Polfreman, B. Oliver, C. Metcalf, D. Halford, “Force & Motion: Conducting to the Click,”Proc. MOCO 2019, ACM, DOI: 10.1145/3347122.3347139. Also see https://generic.wordpress.soton.ac.uk/conductormocap/. 10
-
[9]
Prautzsch, W
H. Prautzsch, W. Boehm, M. Paluszny,Bezier and B-Spline Techniques, Springer, 2002
2002
-
[10]
Rudolf,The Grammar of Conducting, 3rd ed., Schirmer, 1994
M. Rudolf,The Grammar of Conducting, 3rd ed., Schirmer, 1994
1994
-
[11]
An Interactive Conducting System using Kinect,
L.-W. Toh, W. Chao, Y.-S. Chen, “An Interactive Conducting System using Kinect,”IEEE International Conference on Multimedia and Expo (ICME), San Jose, CA, pp. 1–6, 2013
2013
-
[12]
Verhoeff,Crusis: Automated Conductor Display,https:// t-verhoeff-software.pages.tue.nl/crusis/, 2026
T. Verhoeff,Crusis: Automated Conductor Display,https:// t-verhoeff-software.pages.tue.nl/crusis/, 2026
2026
-
[13]
Conducting Patterns,
T. Verhoeff, “Conducting Patterns,”Wolfram Demonstrations Project, 2026 (Sub- mitted, under review)
2026
-
[14]
Gesture and movement in music performance,
G. W¨ ollner, “Gesture and movement in music performance,”Frontiers in Psychol- ogy, 2012. A Example 2-, 3-, and 6-beat conducting patterns To illustrate the use of our model, we show, in addition to the 4-beat pattern in Figure 2, parameterizations of the common 2-, 3-, and 6-beat time signatures. The choice of anchor point positions and roundness values...
2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.