Recognition: unknown
Geometric structure of ideal data-driven dynamical model using RfR method
Pith reviewed 2026-05-10 15:51 UTC · model grok-4.3
The pith
The ideal RfR data-driven model reconstructs the original attractor as a time-delay embedding.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
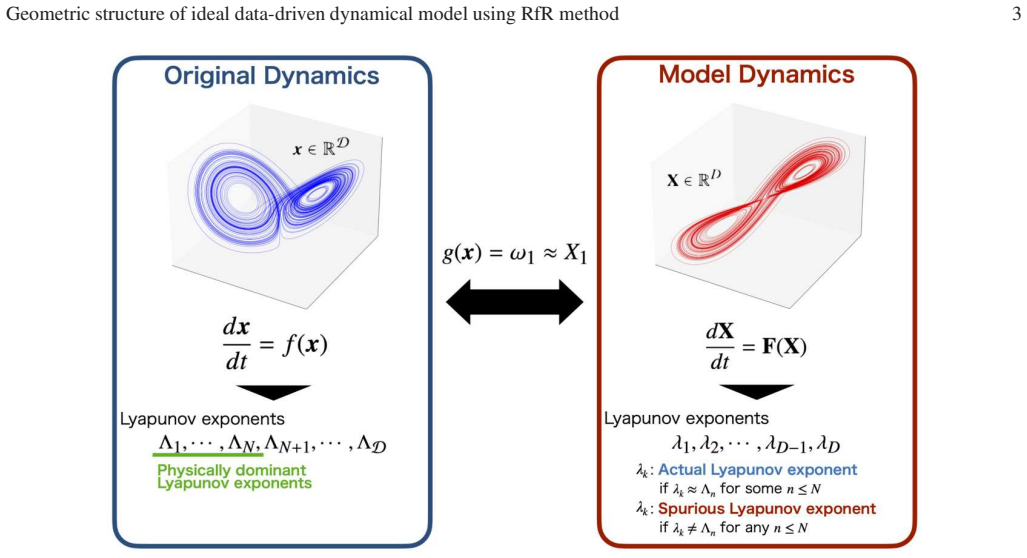
An ideal model, defined as one that reconstructs the negative Lyapunov exponents of the original chaotic dynamics, reconstructs the attractor as a time-delay embedding of the original system. This is determined by analyzing the Lyapunov exponents and the corresponding Lyapunov vectors for both ideal and non-ideal models constructed via the RfR method. Applying these results allows a search for construction methods that produce ideal models robust to hyperparameter changes.
What carries the argument
The ideal versus non-ideal model distinction based on reconstruction of negative Lyapunov exponents, used to compare attractor geometries via Lyapunov vectors.
Load-bearing premise
That classifying models solely by whether they produce negative Lyapunov exponents is enough to determine that their attractor is a time-delay embedding of the original system.
What would settle it
A model that recovers negative Lyapunov exponents yet shows attractor geometry that differs from the original system's time-delay embedding, such as mismatched directions of Lyapunov vectors or incorrect local dimensions.
Figures








read the original abstract
The Gaussian radial function-based Regression (RfR) method is a data-driven modeling approach that utilizes physically understandable variables from scalar time series, constructed using delay coordinates and Gaussian radial basis functions. Even when a model successfully describes an approximate trajectory of the original system, data-driven models rarely reconstruct negative Lyapunov exponents of chaotic dynamics. An ''ideal model'' should reconstruct the dynamical structure, including the negative (physically dominant) Lyapunov exponents. Comparing the ideal model and the non-ideal model, we investigate the geometric structure of the attractor of such models using the Lyapunov exponents and the corresponding Lyapunov vectors. Our investigation suggests that the ideal model reconstructs the original system's attractor as a time-delay embedding. By applying the results, we search for a method to construct an ideal model, which persists against the change in hyperparameters.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces the Gaussian radial function-based Regression (RfR) method for constructing data-driven dynamical models from scalar time series via delay coordinates and Gaussian radial basis functions. It defines 'ideal' models as those recovering the negative Lyapunov exponents of the original chaotic flow and 'non-ideal' models as those that do not; Lyapunov exponents and vectors are then compared to argue that ideal models reconstruct the original system's attractor geometry as a time-delay embedding. The work additionally searches for hyperparameter choices that produce such ideal models consistently.
Significance. If substantiated, the result would clarify conditions under which data-driven models capture the full geometric structure of chaotic attractors, including contracting directions, which is relevant for long-term forecasting and control in nonlinear dynamics. The emphasis on hyperparameter robustness has practical utility. No machine-checked proofs, reproducible code, or parameter-free derivations are reported, but the empirical Lyapunov-vector comparison is a direct attempt to address a known limitation of data-driven chaos modeling.
major comments (2)
- [Abstract] Abstract: the central claim that an ideal RfR model reconstructs the attractor as a time-delay embedding rests on defining ideal/non-ideal solely by the sign of recovered Lyapunov exponents and then comparing the associated vectors. Matching the spectrum plus vectors does not by itself establish diffeomorphism to the Takens-embedded original attractor; no additional invariants (correlation dimension, recurrence plots, or coordinate-wise attractor comparison) are reported to close this inference gap.
- [Methods] Methods/Results: the procedure that produces the ideal model is described only at the level of hyperparameter search over the RfR regression; the exact selection criterion, loss function, or optimization step that enforces recovery of negative exponents must be stated with equations so that the construction can be reproduced and the geometric claim tested independently.
minor comments (2)
- [Abstract] Abstract: the description of the RfR method would benefit from a single key equation showing how the Gaussian radial basis functions are combined with delay coordinates.
- [Introduction] Introduction: add explicit citations to Takens' embedding theorem and to prior work on Lyapunov-spectrum recovery in data-driven models to situate the geometric claim.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major point below and will revise the paper to improve clarity, reproducibility, and support for the geometric claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that an ideal RfR model reconstructs the attractor as a time-delay embedding rests on defining ideal/non-ideal solely by the sign of recovered Lyapunov exponents and then comparing the associated vectors. Matching the spectrum plus vectors does not by itself establish diffeomorphism to the Takens-embedded original attractor; no additional invariants (correlation dimension, recurrence plots, or coordinate-wise attractor comparison) are reported to close this inference gap.
Authors: We agree that matching the Lyapunov spectrum and vectors alone does not constitute a complete proof of diffeomorphism. The comparison of Lyapunov vectors is intended to show that both expanding and contracting directions are recovered in the delay-coordinate representation, which is a necessary condition for preserving the attractor geometry under the embedding. To strengthen the inference, we will add quantitative comparisons of correlation dimension and recurrence plots between the original system and the ideal versus non-ideal models in the revised Results section. revision: yes
-
Referee: [Methods] Methods/Results: the procedure that produces the ideal model is described only at the level of hyperparameter search over the RfR regression; the exact selection criterion, loss function, or optimization step that enforces recovery of negative exponents must be stated with equations so that the construction can be reproduced and the geometric claim tested independently.
Authors: We accept this criticism regarding reproducibility. The ideal-model selection is performed by a grid search over the RfR hyperparameters (width, number of centers, regularization) that minimizes the discrepancy between the recovered Lyapunov spectrum and the known spectrum of the original flow, with explicit retention of the negative exponents. In the revision we will insert the precise equations for the RfR regression, the hyperparameter objective, and the acceptance criterion based on exponent matching. revision: yes
Circularity Check
No circularity; empirical comparison of Lyapunov spectra and vectors
full rationale
The paper defines ideal vs. non-ideal RfR models solely by whether negative Lyapunov exponents are recovered, then compares the associated Lyapunov vectors to infer that the ideal model's attractor is a time-delay embedding of the original. This inference is drawn from direct computation on constructed models rather than any re-derivation of the input definition. No equation reduces a claimed geometric result to the Lyapunov-based selection criterion by construction, no self-citation supplies a uniqueness theorem, and no fitted parameter is relabeled as a prediction. The derivation chain is therefore independent of its own outputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- hyperparameters of RfR
axioms (2)
- domain assumption Delay coordinates plus Gaussian radial basis functions can produce a data-driven model from scalar time series.
- domain assumption Negative Lyapunov exponents are the physically dominant directions that an ideal model must reconstruct.
Reference graph
Works this paper leans on
-
[1]
author author A. J. \ Chorin \ and\ author F. Lu ,\ title title Discrete approach to stochastic parametrization and dimension reduction in nonlinear dynamics , \ @noop journal journal Proceedings of the National Academy of Sciences \ volume 112 ,\ pages 9804--9809 ( year 2015 ) NoStop
2015
-
[2]
author author G. E. \ Karniadakis , author I. G. \ Kevrekidis , author L. Lu , author P. Perdikaris , author S. Wang ,\ and\ author L. Yang ,\ title title Physics-informed machine learning , \ @noop journal journal Nature Reviews Physics \ volume 3 ,\ pages 422--440 ( year 2021 ) NoStop
2021
-
[3]
Raissi , author P
author author M. Raissi , author P. Perdikaris ,\ and\ author G. E. \ Karniadakis ,\ title title Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations , \ @noop journal journal Journal of Computational physics \ volume 378 ,\ pages 686--707 ( year 2019 ) NoStop
2019
-
[4]
Greydanus , author M
author author S. Greydanus , author M. Dzamba ,\ and\ author J. Yosinski ,\ title title Hamiltonian neural networks , \ @noop journal journal Advances in Neural Information Processing Systems \ volume 32 ( year 2019 ) NoStop
2019
-
[5]
author author Y. T. \ Lin , author Y. Tian , author D. Livescu ,\ and\ author M. Anghel ,\ title title Data-driven learning for the mori--zwanzig formalism: A generalization of the koopman learning framework , \ @noop journal journal SIAM Journal on Applied Dynamical Systems \ volume 20 ,\ pages 2558--2601 ( year 2021 ) NoStop
2021
-
[6]
author author I. Mezi \'c ,\ title title Analysis of fluid flows via spectral properties of the koopman operator , \ @noop journal journal Annual Review of Fluid Mechanics \ volume 45 ,\ pages 357--378 ( year 2013 ) NoStop
2013
-
[7]
Berry , author D
author author T. Berry , author D. Giannakis ,\ and\ author J. Harlim ,\ title title Nonparametric forecasting of low-dimensional dynamical systems , \ @noop journal journal Physical Review E \ volume 91 ,\ pages 032915 ( year 2015 ) NoStop
2015
-
[8]
author author J. L. \ Proctor , author S. L. \ Brunton ,\ and\ author J. N. \ Kutz ,\ title title Generalizing koopman theory to allow for inputs and control , \ @noop journal journal SIAM Journal on Applied Dynamical Systems \ volume 17 ,\ pages 909--930 ( year 2018 ) NoStop
2018
-
[9]
author author P. J. \ Schmid ,\ title title Dynamic mode decomposition of numerical and experimental data , \ @noop journal journal Journal of Fluid Mechanics \ volume 656 ,\ pages 5--28 ( year 2010 ) NoStop
2010
-
[10]
author author J. L. \ Proctor , author S. L. \ Brunton ,\ and\ author J. N. \ Kutz ,\ title title Dynamic mode decomposition with control , \ @noop journal journal SIAM Journal on Applied Dynamical Systems \ volume 15 ,\ pages 142--161 ( year 2016 ) NoStop
2016
-
[11]
Pathak , author Z
author author J. Pathak , author Z. Lu , author B. R. \ Hunt , author M. Girvan ,\ and\ author E. Ott ,\ title title Using machine learning to replicate chaotic attractors and calculate L yapunov exponents from data , \ @noop journal journal Chaos \ volume 27 ,\ pages 121102 ( year 2017 ) NoStop
2017
-
[12]
author author M. U. \ Kobayashi , author K. Nakai , author Y. Saiki ,\ and\ author N. Tsutsumi ,\ title title Dynamical system analysis of a data-driven model constructed by reservoir computing , \ @noop journal journal Physical Review E \ volume 104 ,\ pages 044215 ( year 2021 ) NoStop
2021
-
[13]
author author R. T. \ Chen , author Y. Rubanova , author J. Bettencourt ,\ and\ author D. K. \ Duvenaud ,\ title title Neural ordinary differential equations , \ @noop journal journal Advances in N eural I nformation P rocessing S ystems \ volume 31 ,\ pages 6571--6583 ( year 2018 ) NoStop
2018
-
[14]
Takens ,\ @noop title Dynamical systems and turbulence , \ ( year 1981 ) NoStop
author author F. Takens ,\ @noop title Dynamical systems and turbulence , \ ( year 1981 ) NoStop
1981
-
[15]
author author C. M. \ Bishop ,\ title title Pattern recognition and machine learning , \ @noop journal journal Springer google schola \ volume 2 ,\ pages 1122--1128 ( year 2006 ) NoStop
2006
-
[16]
Kawano \ and\ author S
author author S. Kawano \ and\ author S. Konishi ,\ title title Nonlinear regression modeling via regularized gaussian basis function , \ @noop journal journal Bulletin of Informatics and Cybernetics \ volume 39 ,\ pages 83--96 ( year 2007 ) NoStop
2007
-
[17]
author author L. A. \ Smith ,\ title title Identification and prediction of low dimensional dynamics , \ @noop journal journal Physica D \ volume 58 ,\ pages 50--76 ( year 1992 ) NoStop
1992
-
[18]
Small , author K
author author M. Small , author K. Judd ,\ and\ author A. Mees ,\ title title Modeling continuous processes from data , \ @noop journal journal Physical Review E \ volume 65 ,\ pages 046704 ( year 2002 ) NoStop
2002
-
[19]
Tsutsumi , author K
author author N. Tsutsumi , author K. Nakai ,\ and\ author Y. Saiki ,\ title title Constructing differential equations using only a scalar time-series about continuous time chaotic dynamics , \ @noop journal journal Chaos \ volume 32 ,\ pages 091101 ( year 2022 ) NoStop
2022
-
[20]
\ Wang , author R
author author W.-X. \ Wang , author R. Yang , author Y.-C. \ Lai , author V. Kovanis ,\ and\ author C. Grebogi ,\ title title Predicting catastrophes in nonlinear dynamical systems by compressive sensing , \ @noop journal journal Physical Review Letter \ volume 106 ,\ pages 154101 ( year 2011 ) NoStop
2011
-
[21]
author author S. L. \ Brunton , author J. L. \ Proctor ,\ and\ author J. N. \ Kutz ,\ title title Discovering governing equations from data by sparse identification of nonlinear dynamical systems , \ @noop journal journal Proc. Natl. Acad. Sci. \ volume 113 ,\ pages 3932--3937 ( year 2016 ) NoStop
2016
-
[22]
Tsutsumi , author K
author author N. Tsutsumi , author K. Nakai ,\ and\ author Y. Saiki ,\ title title Constructing low-dimensional ordinary differential equations from chaotic time series of high- or infinite-dimensional systems using radial-function-based regression , \ @noop journal journal Physical Review E \ volume 108 ,\ pages 054220 ( year 2023 ) NoStop
2023
-
[23]
Tsutsumi , author K
author author N. Tsutsumi , author K. Nakai ,\ and\ author Y. Saiki ,\ title title Data-driven ordinary-differential-equation modeling of high-frequency complex dynamics via a low-frequency dynamics model , \ @noop journal journal Physical Review E \ volume 111 ,\ pages 014212 ( year 2025 ) NoStop
2025
-
[24]
author author J. L. \ Kaplan \ and\ author J. A. \ Yorke ,\ @noop journal journal Communications in Mathematical Physics \ volume 67 ,\ pages 93 ( year 1979 ) NoStop
1979
-
[25]
Wolf , author J
author author A. Wolf , author J. B. \ Swift , author H. L. \ Swinney ,\ and\ author J. A. \ Vastano ,\ title title Determining lyapunov exponents from a time series , \ @noop journal journal Physica D \ volume 16 ,\ pages 285--317 ( year 1985 ) NoStop
1985
-
[26]
author author U. Parlitz ,\ title title Identification of true and spurious L yapunov exponents from time series , \ @noop journal journal International Journal of Bifurcation and Chaos \ volume 2 ,\ pages 155--165 ( year 1992 ) NoStop
1992
-
[27]
Brown , author P
author author R. Brown , author P. Bryant ,\ and\ author H. D. \ Abarbanel ,\ title title Computing the L yapunov spectrum of a dynamical system from an observed time series , \ @noop journal journal Physical Review A \ volume 43 ,\ pages 2787 ( year 1991 ) NoStop
1991
-
[28]
Sun \ and\ author C
author author Y. Sun \ and\ author C. Q. \ Wu ,\ title title A radial-basis-function network-based method of estimating L yapunov exponents from a scalar time series for analyzing nonlinear systems stability , \ @noop journal journal Nonlinear Dynamics \ volume 70 ,\ pages 1689--1708 ( year 2012 ) NoStop
2012
-
[29]
note For non-ideal models, the Lyapunov exponents originating from the actual or spurious Lyapunov exponents of the ideal model are called the actual or spurious Lyapunov exponents, respectively. Stop
-
[30]
Sauer , author J
author author T. Sauer , author J. A. \ Yorke ,\ and\ author M. Casdagli ,\ title title Embedology , \ @noop journal journal Journal of Statistical Physics \ volume 65 ,\ pages 579--616 ( year 1991 ) NoStop
1991
-
[31]
Ott \ and\ author J
author author W. Ott \ and\ author J. A. \ Yorke ,\ title title Learning about reality from observation , \ @noop journal journal SIAM Journal on Applied Dynamical Systems \ volume 2 ,\ pages 297--322 ( year 2003 ) NoStop
2003
-
[32]
note The main body defines the actual/spurious Lyapunov exponents only for data-driven models. For a delay-embedded system, they can be defined similarly for data-driven models; the actual Lyapunov exponents are Lyapunov exponents in the original dynamics, and the others are the spurious Lyapunov exponents. Stop
-
[33]
author author T. D. \ Sauer , author J. A. \ Tempkin ,\ and\ author J. A. \ Yorke ,\ title title Spurious L yapunov exponents in attractor reconstruction , \ @noop journal journal Physical Review Letters \ volume 81 ,\ pages 4341 ( year 1998 ) NoStop
1998
-
[34]
author author J. A. \ Tempkin \ and\ author J. A. \ Yorke ,\ title title Spurious L yapunov exponents computed from data , \ @noop journal journal SIAM Journal on Applied Dynamical Systems \ volume 6 ,\ pages 457--474 ( year 2007 ) NoStop
2007
-
[35]
Ginelli , author P
author author F. Ginelli , author P. Poggi , author A. Turchi , author H. Chat \'e , author R. Livi ,\ and\ author A. Politi ,\ title title Characterizing dynamics with covariant L yapunov vectors , \ @noop journal journal Physical Review Letters \ volume 99 ,\ pages 130601 ( year 2007 ) NoStop
2007
-
[36]
Saiki \ and\ author M
author author Y. Saiki \ and\ author M. U. \ Kobayashi ,\ title title Numerical identification of nonhyperbolicity of the lorenz system through L yapunov vectors , \ @noop journal journal JSIAM Letters \ volume 2 ,\ pages 107--110 ( year 2010 ) NoStop
2010
-
[37]
Sweet , author H
author author D. Sweet , author H. E. \ Nusse ,\ and\ author J. A. \ Yorke ,\ title title Stagger-and-step method: Detecting and computing chaotic saddles in higher dimensions , \ @noop journal journal Physical Review Letters \ volume 86 ,\ pages 2261--2264 ( year 2001 ) NoStop
2001
-
[38]
Berry \ and\ author S
author author T. Berry \ and\ author S. Das ,\ title title Learning theory for dynamical systems , \ @noop journal journal SIAM Journal on Applied Dynamical Systems \ volume 22 ,\ pages 2082--2122 ( year 2023 ) NoStop
2082
-
[39]
author author J. D. \ Hart ,\ title title Attractor reconstruction with reservoir computers: The effect of the reservoir’s conditional L yapunov exponents on faithful attractor reconstruction , \ @noop journal journal Chaos \ volume 34 ,\ pages 043123 ( year 2024 ) NoStop
2024
-
[40]
Berry \ and\ author S
author author T. Berry \ and\ author S. Das ,\ title title Limits of learning dynamical systems , \ @noop journal journal SIAM Review \ volume 67 ,\ pages 107--137 ( year 2025 ) NoStop
2025
-
[41]
author author M. U. \ Kobayashi \ and\ author Y. Saiki ,\ title title Manifold structures of unstable periodic orbits and the appearance of periodic windows in chaotic systems , \ @noop journal journal Physical Review E \ volume 89 ,\ pages 022904 ( year 2014 ) NoStop
2014
-
[42]
note No inertial manifold exists if the model dynamics is realized as a chaotic saddle; however, even in that case, we can do a similar analysis using the enveloping manifold ott2003 . Stop
-
[43]
author author A. S. \ Zu Schweinsberg , author T. Ritz , author U. Dressler , author B. H \"u binger , author R. Doerner ,\ and\ author W. Martienssen ,\ title title Quasicontinuous control of a bronze ribbon experiment using time-delay coordinates , \ @noop journal journal Physical Review E \ volume 55 ,\ pages 2145 ( year 1997 ) NoStop
1997
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.