Recognition: unknown
Uncertainty-Aware Sparse Identification of Dynamical Systems via Bayesian Model Averaging
Pith reviewed 2026-05-10 14:56 UTC · model grok-4.3
The pith
Bayesian model averaging yields posterior probabilities for each candidate interaction when identifying sparse dynamical systems from data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors combine sparse modeling with Bayesian model averaging to produce posterior inclusion probabilities that quantify the credibility of each candidate interaction and basis component; numerical tests on oscillator networks confirm that this recovers sparse interaction structures with uncertainty estimates for higher-order, phase-lag, and multi-body effects, and continues to locate effective terms even when the true governing equations are absent from the model class.
What carries the argument
Bayesian model averaging over sparse regression models for dynamical systems, which supplies posterior inclusion probabilities for every candidate interaction and basis function.
If this is right
- Each candidate interaction receives an explicit probability that it belongs in the model, allowing direct comparison of competing explanations.
- Higher-order harmonics, phase lags, and multi-body terms can be retained or discarded according to their posterior support rather than ad-hoc thresholds.
- When the exact equations are unknown, the procedure still returns an effective functional form accompanied by uncertainty measures.
- Model selection becomes probabilistic, so downstream tasks such as prediction or control can incorporate the full posterior over structures.
Where Pith is reading between the lines
- The posterior probabilities could serve as a prior for sequential model updates when new observations arrive.
- The same averaging machinery might be applied to other data-driven settings such as reaction networks or gene regulatory models where interaction libraries are large.
- Uncertainty over model structure could be propagated into forecasts to produce calibrated prediction intervals rather than point predictions alone.
Load-bearing premise
Success on simulated oscillator networks is taken as evidence that the method accurately recovers structures and supplies useful uncertainty estimates in general settings with limited or poorly identifiable data.
What would settle it
A controlled simulation in which the true sparse interaction structure is known but the method assigns high posterior probability to incorrect terms or fails to recover the known couplings.
Figures















read the original abstract
In many problems of data-driven modeling for dynamical systems, the governing equations are not known a priori and must be selected phenomenologically from a large set of candidate interactions and basis functions. In such situations, point estimates alone can be misleading, because multiple model components may explain the observed data comparably well, especially when the data are limited or the dynamics exhibit poor identifiability. Quantifying the uncertainty associated with model selection is therefore essential for constructing reliable dynamical models from data. In this work, we develop a Bayesian sparse identification framework for dynamical systems with coupled components, aimed at inferring both interaction structure and functional form together with principled uncertainty quantification. The proposed method combines sparse modeling with Bayesian model averaging, yielding posterior inclusion probabilities that quantify the credibility of each candidate interaction and basis component. Through numerical experiments on oscillator networks, we show that the framework accurately recovers sparse interaction structures with quantified uncertainty, including higher-order harmonic components, phase-lag effects, and multi-body interactions. We also demonstrate that, even in a phenomenological setting where the true governing equations are not contained in the assumed model class, the method can identify effective functional components with quantified uncertainty. These results highlight the importance of Bayesian uncertainty quantification in data-driven discovery of dynamical models.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a Bayesian sparse identification framework for dynamical systems that integrates sparse regression with Bayesian model averaging. This yields posterior inclusion probabilities for candidate interaction terms and basis functions, providing uncertainty quantification on both structure and functional form. Numerical experiments on oscillator networks are used to demonstrate recovery of sparse structures (including higher-order harmonics, phase lags, and multi-body interactions) and identification of effective components even under model mismatch.
Significance. If the validation concerns are addressed, the approach could meaningfully extend point-estimate methods such as SINDy by supplying calibrated uncertainty on model selection in poorly identifiable regimes. This is relevant for data-driven modeling in physics and engineering where multiple explanations fit limited data equally well. The numerical demonstrations on coupled oscillators provide a concrete test bed, but the work's broader utility hinges on showing that the uncertainty measures are reliable and actionable beyond the simulated setting.
major comments (3)
- [Numerical Experiments] Numerical Experiments section: the claim of 'accurate recovery' of sparse interaction structures is not supported by quantitative metrics (e.g., precision-recall for term inclusion, RMSE on held-out trajectories, or comparison against standard SINDy and other Bayesian baselines). Without these, it is impossible to judge whether the Bayesian averaging improves upon point estimates.
- [Results / Numerical Experiments] Results on oscillator networks (and the mismatch experiment): no posterior predictive checks, calibration plots, or coverage diagnostics are reported for the posterior inclusion probabilities or credible intervals. This leaves open whether the quantified uncertainty reflects true epistemic uncertainty or is an artifact of library size and prior specification, which is central to the UQ contribution.
- [Model Mismatch Experiment] Model-mismatch demonstration: while effective functional components are identified, the manuscript does not show that these components yield better predictive performance or interpretability than the corresponding point-estimate SINDy solution on the same data. This comparison is required to substantiate the advantage of the Bayesian procedure.
minor comments (2)
- [Methods] Notation for the candidate library and the spike-and-slab or horseshoe prior should be defined explicitly in the Methods section with a clear mapping to the posterior inclusion probabilities.
- [Figures] Figures displaying posterior inclusion probabilities would benefit from showing results across multiple independent runs or data realizations to illustrate variability.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We agree that additional quantitative metrics, validation diagnostics, and direct comparisons will strengthen the manuscript's claims regarding recovery accuracy and the reliability of the uncertainty quantification. We address each point below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Numerical Experiments] Numerical Experiments section: the claim of 'accurate recovery' of sparse interaction structures is not supported by quantitative metrics (e.g., precision-recall for term inclusion, RMSE on held-out trajectories, or comparison against standard SINDy and other Bayesian baselines). Without these, it is impossible to judge whether the Bayesian averaging improves upon point estimates.
Authors: We acknowledge that the current Numerical Experiments section relies primarily on visual inspection of recovered structures rather than quantitative metrics. In the revision we will add precision-recall statistics for term inclusion, RMSE on held-out trajectories, and explicit comparisons against standard SINDy as well as other Bayesian sparse regression baselines. These additions will provide a clearer, quantitative demonstration of the benefits of Bayesian model averaging over point estimates. revision: yes
-
Referee: [Results / Numerical Experiments] Results on oscillator networks (and the mismatch experiment): no posterior predictive checks, calibration plots, or coverage diagnostics are reported for the posterior inclusion probabilities or credible intervals. This leaves open whether the quantified uncertainty reflects true epistemic uncertainty or is an artifact of library size and prior specification, which is central to the UQ contribution.
Authors: We agree that posterior predictive checks and calibration diagnostics are necessary to substantiate the uncertainty quantification. We will incorporate posterior predictive checks on held-out trajectories, calibration plots for the inclusion probabilities, and coverage diagnostics for the credible intervals in the revised Results section. These diagnostics will help confirm that the reported uncertainties are well-calibrated and not artifacts of library size or prior choice. revision: yes
-
Referee: [Model Mismatch Experiment] Model-mismatch demonstration: while effective functional components are identified, the manuscript does not show that these components yield better predictive performance or interpretability than the corresponding point-estimate SINDy solution on the same data. This comparison is required to substantiate the advantage of the Bayesian procedure.
Authors: We recognize that a direct comparison of predictive performance between the Bayesian-averaged model and the point-estimate SINDy solution is needed in the model-mismatch experiment. In the revision we will report predictive RMSE (and, where appropriate, interpretability metrics) on test trajectories for both approaches. This will provide concrete evidence of any advantages offered by the Bayesian procedure. revision: yes
Circularity Check
No significant circularity in the Bayesian sparse identification framework
full rationale
The paper proposes a framework that integrates sparse regression with Bayesian model averaging to infer interaction structures and quantify uncertainty via posterior inclusion probabilities. This construction follows directly from standard Bayesian principles applied to a library of candidate terms and does not reduce to any self-defined inputs or fitted parameters renamed as predictions. The central claims are supported by numerical experiments on simulated oscillator networks, which provide independent validation rather than tautological confirmation. No load-bearing self-citations, uniqueness theorems imported from prior author work, or ansatzes smuggled via citation are evident. The derivation chain is self-contained and relies on externally established Bayesian and sparse modeling techniques.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Observed time-series data can be explained by a linear combination of candidate basis functions with additive noise.
- standard math Bayesian model averaging yields meaningful posterior inclusion probabilities for model components.
Reference graph
Works this paper leans on
-
[1]
+ 3L(3)(N−1)(N−2). b. Indicators and vectorization.For each interac- tion class introduced in Sec. III, we assign a binary struc- tural indicator to every basis function. Specifically, (i) c(2) ij denotes whether the pairwise interactionB (2) ij is ac- tive, (ii)c (3,a) ijk denotes whether the asymmetric three– body basisB (3,a) ijk is active, and (iii)c ...
2000
-
[2]
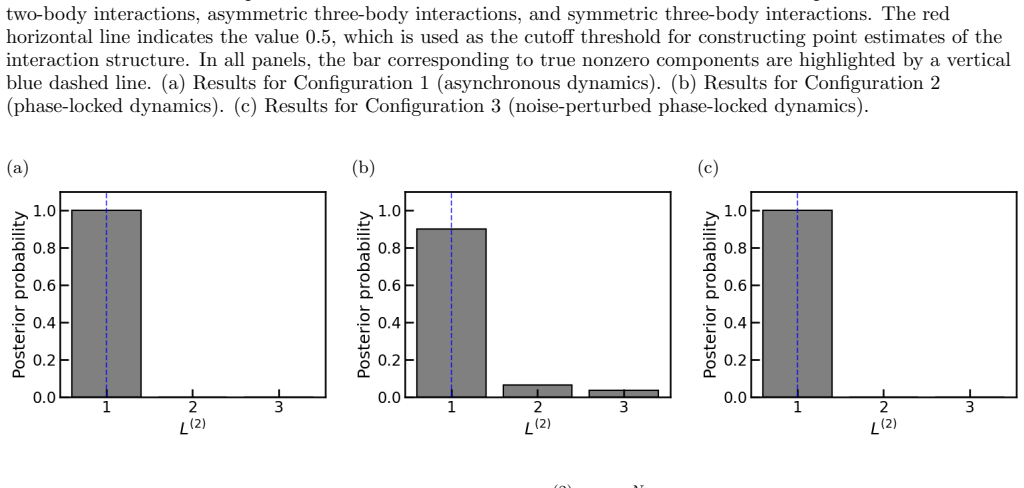
We consider a system of three oscillators with the true sparse interactions c21 = 1, c 31 = 1, c (a) 123 = 1, c (s) 312 = 1, 12 (a) (b) FIG
Configuration 1: Asynchronous dynamics We first demonstrate our framework by inferring the interaction structure of a small oscillatory network. We consider a system of three oscillators with the true sparse interactions c21 = 1, c 31 = 1, c (a) 123 = 1, c (s) 312 = 1, 12 (a) (b) FIG. 12: Dependence of the MSEE Θ on (a) the number of data points and (b) t...
2000
-
[3]
Configuration 2: Phase-locked dynamics Next, we consider a configuration similar to Configura- tion 1, but with modified phase-lag and higher-harmonic settings. We again set c21 = 1, c 31 = 1, c (a) 123 = 1, c (s) 312 = 1, and all other indicators to zero, while keeping the same coupling strengths as before, K21 =K 31 =K (a) 123 =K (s) 312 = 0.5. The phas...
2000
-
[4]
The resulting trajectory (Fig
Configuration 3: Breaking phase locking with larger dynamical noise To examine the effect of dynamical noise in phase- locked regimes, we repeat Configuration 2 with an in- creased noise levelσ d = 0.5, while keeping all other set- tings unchanged. The resulting trajectory (Fig. 2c) ex- hibits fluctuations, producing richer dynamical variabil- ity. The in...
-
[5]
The results are summarized in Figs
Robustness analysis To evaluate the robustness of our method with respect to the number of data points and the magnitude of dy- namical noise, we repeated data generation and estima- tion for various settings and computed the mean and standard error of the metricsE c andE Θ. The results are summarized in Figs. 9a–11b. a. Asynchronous regime (Configuration...
-
[6]
Effect of observational noise We next examine the impact of observational noise on estimation performance. To isolate this effect, we focus on two configurations, namely Configuration 1 and Con- figuration 3, for which the true network structure and in- teraction orders are accurately recovered in the absence of observational noise. Figures 13a and 13b sh...
-
[7]
S. H. Strogatz,Nonlinear dynamics and chaos: with ap- plications to physics, biology, chemistry, and engineering (Chapman and Hall/CRC, 2024)
2024
-
[8]
S. L. Brunton, J. L. Proctor, and J. N. Kutz, Discovering governing equations from data by sparse identification of nonlinear dynamical systems, Proceedings of the national academy of sciences113, 3932 (2016)
2016
-
[9]
Timme and J
M. Timme and J. Casadiego, Revealing networks from dynamics: an introduction, Journal of Physics A: Math- ematical and Theoretical47, 343001 (2014)
2014
-
[10]
Ljung, Perspectives on system identification, Annual Reviews in Control34, 1 (2010)
L. Ljung, Perspectives on system identification, Annual Reviews in Control34, 1 (2010)
2010
-
[11]
Schmidt and H
M. Schmidt and H. Lipson, Distilling free-form natural laws from experimental data, science324, 81 (2009)
2009
-
[12]
Bairey, E
E. Bairey, E. D. Kelsic, and R. Kishony, High-order species interactions shape ecosystem diversity, Nature communications7, 12285 (2016)
2016
-
[13]
Dayan and L
P. Dayan and L. F. Abbott,Theoretical neuroscience: computational and mathematical modeling of neural sys- tems(MIT press, 2005)
2005
-
[14]
E. M. Izhikevich,Dynamical systems in neuroscience (MIT press, 2007)
2007
-
[15]
S. H. Strogatz, Human sleep and circadian rhythms: a simple model based on two coupled oscillators, Journal of mathematical biology25, 327 (1987)
1987
-
[16]
Horn and R
F. Horn and R. Jackson, General mass action kinet- ics, Archive for rational mechanics and analysis47, 81 (1972)
1972
-
[17]
Feinberg, Chemical reaction network structure and the stability of complex isothermal reactors—i
M. Feinberg, Chemical reaction network structure and the stability of complex isothermal reactors—i. the defi- ciency zero and deficiency one theorems, Chemical engi- neering science42, 2229 (1987)
1987
-
[18]
Martynenko and V
A. Martynenko and V. Zozulya, Mathematical modeling of the cardiac tissue, Mechanics of Advanced Materials and Structures29, 4506 (2022)
2022
-
[19]
A. T. Winfree, Biological rhythms and the behavior of populations of coupled oscillators, Journal of theoretical biology16, 15 (1967)
1967
-
[20]
Leleu, F
T. Leleu, F. Khoyratee, T. Levi, R. Hamerly, T. Kohno, and K. Aihara, Scaling advantage of chaotic amplitude control for high-performance combinatorial optimization, Communications Physics4, 266 (2021)
2021
-
[21]
Banerjee, S
A. Banerjee, S. Chandra, and E. Ott, Network inference from short, noisy, low time-resolution, partial measure- ments: Application to c. elegans neuronal calcium dy- namics, Proceedings of the National Academy of Sciences 120, e2216030120 (2023)
2023
-
[22]
H. Kori, C. G. Rusin, I. Z. Kiss, and J. L. Hudson, Syn- chronization engineering: Theoretical framework and ap- plication to dynamical clustering, Chaos: An Interdisci- plinary Journal of Nonlinear Science18(2008)
2008
-
[23]
I. Z. Kiss, C. G. Rusin, H. Kori, and J. L. Hudson, En- gineering complex dynamical structures: Sequential pat- terns and desynchronization, Science316, 1886 (2007)
2007
-
[24]
Stankovski, T
T. Stankovski, T. Pereira, P. V. McClintock, and A. Ste- fanovska, Coupling functions: Universal insights into dynamical interaction mechanisms, Reviews of Modern Physics89, 045001 (2017)
2017
-
[25]
Rosenblum and A
M. Rosenblum and A. Pikovsky, Inferring connectivity of an oscillatory network via the phase dynamics re- construction, Frontiers in network physiology3, 1298228 (2023)
2023
-
[26]
M. G. Rosenblum and A. S. Pikovsky, Detecting direction of coupling in interacting oscillators, Physical Review E 64, 045202 (2001)
2001
-
[27]
I. T. Tokuda, S. Jain, I. Z. Kiss, and J. L. Hudson, Infer- ring phase equations from multivariate time series, Phys- ical review letters99, 064101 (2007)
2007
-
[28]
Kralemann, L
B. Kralemann, L. Cimponeriu, M. Rosenblum, A. Pikovsky, and R. Mrowka, Uncovering interac- tion of coupled oscillators from data, Physical Review E—Statistical, Nonlinear, and Soft Matter Physics76, 055201 (2007)
2007
-
[29]
Kralemann, A
B. Kralemann, A. Pikovsky, and M. Rosenblum, Recon- structing phase dynamics of oscillator networks, Chaos: An Interdisciplinary Journal of Nonlinear Science21 (2011)
2011
-
[30]
Stankovski, A
T. Stankovski, A. Duggento, P. V. McClintock, and A. Stefanovska, Inference of time-evolving coupled dy- namical systems in the presence of noise, Physical review letters109, 024101 (2012)
2012
-
[31]
Stankovski, V
T. Stankovski, V. Ticcinelli, P. V. McClintock, and A. Stefanovska, Coupling functions in networks of oscil- lators, New Journal of Physics17, 035002 (2015)
2015
-
[32]
Stankovski, T
T. Stankovski, T. Pereira, P. V. McClintock, and A. Ste- fanovska, Coupling functions: dynamical interaction mechanisms in the physical, biological and social sciences (2019)
2019
- [33]
-
[34]
K. Ota, I. Aihara, and T. Aoyagi, Interaction mecha- nisms quantified from dynamical features of frog cho- ruses, Royal Society open science7, 191693 (2020)
2020
-
[35]
I. T. Tokuda, Z. Levnajic, and K. Ishimura, A practical method for estimating coupling functions in complex dy- namical systems, Philosophical Transactions of the Royal Society A377, 20190015 (2019)
2019
-
[36]
M. R. R. Tabar, F. Nikakhtar, L. Parkavousi, A. Akhshi, U. Feudel, and K. Lehnertz, Revealing higher-order in- teractions in high-dimensional complex systems: A data- driven approach, Physical Review X14, 011050 (2024)
2024
-
[37]
Matsuki, H
A. Matsuki, H. Kori, and R. Kobayashi, Network infer- ence applicable to both synchronous and desynchronous systems from oscillatory signals, PLOS Complex Systems 2, e0000063 (2025)
2025
-
[38]
J. A. Acebr´ on, L. L. Bonilla, C. J. P´ erez Vicente, F. Ri- tort, and R. Spigler, The kuramoto model: A simple paradigm for synchronization phenomena, Reviews of modern physics77, 137 (2005)
2005
-
[39]
Kuramoto,Chemical oscillations, waves, and turbu- lence(Courier Corporation, 2003)
Y. Kuramoto,Chemical oscillations, waves, and turbu- lence(Courier Corporation, 2003)
2003
-
[40]
Himeoka and C
Y. Himeoka and C. Furusawa, Perturbation-response analysis of in silico metabolic dynamics revealed hard- coded responsiveness in the cofactors and network spar- sity, eLife13, RP98800 (2025)
2025
-
[41]
Fasel, J
U. Fasel, J. N. Kutz, B. W. Brunton, and S. L. Brunton, Ensemble-sindy: Robust sparse model discovery in the low-data, high-noise limit, with active learning and con- trol, Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences478(2022)
2022
-
[42]
S. M. Hirsh, D. A. Barajas-Solano, and J. N. Kutz, Spar- 18 sifying priors for bayesian uncertainty quantification in model discovery, Royal Society open science9, 211823 (2022)
2022
-
[43]
Bertsimas and W
D. Bertsimas and W. Gurnee, Learning sparse nonlin- ear dynamics via mixed-integer optimization, Nonlinear Dynamics111, 6585 (2023)
2023
-
[44]
N. M. Mangan, S. L. Brunton, J. L. Proctor, and J. N. Kutz, Inferring biological networks by sparse identifica- tion of nonlinear dynamics, IEEE Transactions on Molec- ular, Biological, and Multi-Scale Communications2, 52 (2017)
2017
- [45]
-
[46]
Gelman, J
A. Gelman, J. B. Carlin, H. S. Stern, and D. B. Rubin, Bayesian data analysis(Chapman and Hall/CRC, 1995)
1995
-
[47]
Y. Kato, S. Kashiwamura, E. Watanabe, M. Okada, and H. Kori, Bayesian estimation of coupling strength and heterogeneity in a coupled oscillator model from macro- scopic quantities, Physical Review E112, 034215 (2025)
2025
-
[48]
J. Wang, G. Peng, and S. Wang, Model selection on tourism forecasting: A comparison between bayesian model averaging and lasso, African Journal of Business Management11, 158 (2017)
2017
-
[49]
S. A. Bainter, T. G. McCauley, M. M. Fahmy, Z. T. Goodman, L. B. Kupis, and J. S. Rao, Comparing bayesian variable selection to lasso approaches for ap- plications in psychology, psychometrika88, 1032 (2023)
2023
-
[50]
Garc´ ıa-Donato, M
G. Garc´ ıa-Donato, M. E. Castellanos, and A. Quir´ os, Bayesian variable selection with applications in health sciences, Mathematics9, 218 (2021)
2021
-
[51]
Obinata, T
K. Obinata, T. Nakayama, A. Ishikawa, K. Sodeyama, K. Nagata, Y. Igarashi, and M. Okada, Data integration for multiple alkali metals in predicting coordination ener- gies based on bayesian inference, Science and Technology of Advanced Materials: Methods2, 355 (2022)
2022
-
[52]
Obinata, Y
K. Obinata, Y. Igarashi, K. Nagata, K. Sodeyama, and M. Okada, Confidence evaluation for feature selection in expanded feature space based on density of states, APL Machine Learning3(2025)
2025
-
[53]
A. E. Raftery, D. Madigan, and J. A. Hoeting, Bayesian model averaging for linear regression models, Journal of the American Statistical Association92, 179 (1997)
1997
-
[54]
Wasserman, Bayesian model selection and model aver- aging, Journal of mathematical psychology44, 92 (2000)
L. Wasserman, Bayesian model selection and model aver- aging, Journal of mathematical psychology44, 92 (2000)
2000
-
[55]
T. M. Fragoso, W. Bertoli, and F. Louzada, Bayesian model averaging: A systematic review and concep- tual classification, International Statistical Review86, 1 (2018)
2018
-
[56]
C. M. Bishop and N. M. Nasrabadi,Pattern recognition and machine learning, Vol. 4 (Springer, 2006)
2006
-
[57]
P. J. Wangersky, Lotka-volterra population models, An- nual Review of Ecology and Systematics9, 189 (1978)
1978
-
[58]
Karlebach and R
G. Karlebach and R. Shamir, Modelling and analysis of gene regulatory networks, Nature reviews Molecular cell biology9, 770 (2008)
2008
-
[59]
Hukushima and K
K. Hukushima and K. Nemoto, Exchange monte carlo method and application to spin glass simulations, Journal of the Physical Society of Japan65, 1604 (1996)
1996
-
[60]
R. H. Swendsen and J.-S. Wang, Replica monte carlo sim- ulation of spin glasses, Physical review letters57, 2607 (1986)
1986
-
[61]
U. H. Hansmann, Parallel tempering algorithm for con- formational studies of biological molecules, Chemical Physics Letters281, 140 (1997)
1997
-
[62]
Sambridge, A parallel tempering algorithm for proba- bilistic sampling and multimodal optimization, Geophys- ical Journal International196, 357 (2014)
M. Sambridge, A parallel tempering algorithm for proba- bilistic sampling and multimodal optimization, Geophys- ical Journal International196, 357 (2014)
2014
-
[63]
Nagata and S
K. Nagata and S. Watanabe, Asymptotic behavior of ex- change ratio in exchange monte carlo method, Neural Networks21, 980 (2008)
2008
-
[64]
Y. Wu, N. Wang, L. Li, and J. Xiao, Anti-phase synchro- nization of two coupled mechanical metronomes, Chaos: An Interdisciplinary Journal of Nonlinear Science22, 023146 (2012)
2012
-
[65]
G. H. Goldsztein, L. Q. English, E. Behta, H. Finder, A. N. Nadeau, and S. H. Strogatz, Coupled metronomes on a moving platform with coulomb friction, Chaos: An Interdisciplinary Journal of Nonlinear Science32, 043119 (2022)
2022
-
[66]
Kato and H
Y. Kato and H. Kori, Weakly nonlinear analysis on syn- chronization and oscillation quenching of coupled me- chanical oscillators, Scientific Reports14, 1461 (2024)
2024
-
[67]
Ulrichs, A
H. Ulrichs, A. Mann, and U. Parlitz, Synchronization and chaotic dynamics of coupled mechanical metronomes, Chaos: An Interdisciplinary Journal of Nonlinear Science 19, 043120 (2009)
2009
-
[68]
Mezard and A
M. Mezard and A. Montanari,Information, physics, and computation(Oxford University Press, 2009)
2009
-
[69]
Y. Izumida and H. Kori, Coarse-grained descrip- tion of general oscillator networks, arXiv preprint arXiv:1311.0917 (2013)
-
[70]
Strogatz, Synchronization: A universal concept in non- linear sciences, Physics Today56, 47 (2003)
S. Strogatz, Synchronization: A universal concept in non- linear sciences, Physics Today56, 47 (2003)
2003
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.