Recognition: no theorem link
WM-DAgger: Enabling Efficient Data Aggregation for Imitation Learning with World Models
Pith reviewed 2026-05-10 16:25 UTC · model grok-4.3
The pith
World models synthesize corrective recovery data to scale imitation learning without ongoing human supervision.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
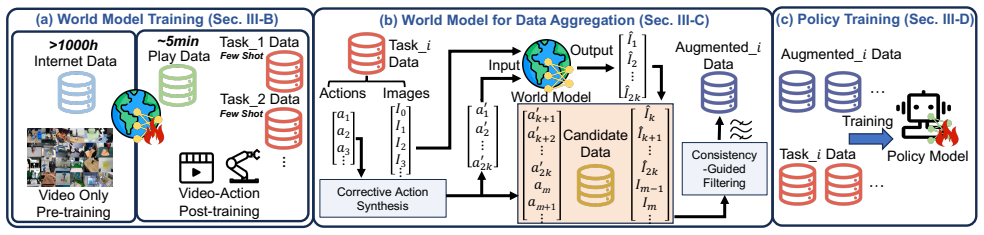
WM-DAgger enables efficient data aggregation for imitation learning by leveraging world models to synthesize OOD recovery data without requiring human involvement. Specifically, the Corrective Action Synthesis Module generates task-oriented recovery actions to prevent misleading supervision, and the Consistency-Guided Filtering Module discards physically implausible trajectories by anchoring terminal synthesized frames to corresponding real frames in expert demonstrations. Validation on multiple real-world robotic manipulation tasks shows the method significantly improves success rates, achieving a 93.3% success rate in soft bag pushing with only five demonstrations.
What carries the argument
The WM-DAgger framework, which uses a world model together with a Corrective Action Synthesis Module and a Consistency-Guided Filtering Module to produce reliable out-of-distribution recovery data.
Load-bearing premise
The corrective action synthesis and consistency filtering modules reliably overcome world model hallucinations to produce useful recovery data.
What would settle it
An ablation experiment that removes both the Corrective Action Synthesis Module and the Consistency-Guided Filtering Module, then measures whether success rates on the same real-robot tasks fall back to the level of standard imitation learning.
Figures




read the original abstract
Imitation learning is a powerful paradigm for training robotic policies, yet its performance is limited by compounding errors: minor policy inaccuracies could drive robots into unseen out-of-distribution (OOD) states in the training set, where the policy could generate even bigger errors, leading to eventual failures. While the Data Aggregation (DAgger) framework tries to address this issue, its reliance on continuous human involvement severely limits scalability. In this paper, we propose WM-DAgger, an efficient data aggregation framework that leverages World Models to synthesize OOD recovery data without requiring human involvement. Specifically, we focus on manipulation tasks with an eye-in-hand robotic arm and only few-shot demonstrations. To avoid synthesizing misleading data and overcome the hallucination issues inherent to World Models, our framework introduces two key mechanisms: (1) a Corrective Action Synthesis Module that generates task-oriented recovery actions to prevent misleading supervision, and (2) a Consistency-Guided Filtering Module that discards physically implausible trajectories by anchoring terminal synthesized frames to corresponding real frames in expert demonstrations. We extensively validate WM-DAgger on multiple real-world robotic tasks. Results that our method significantly improves success rates, achieving a 93.3\% success rate in soft bag pushing with only five demonstrations. The source code is publicly available at https://github.com/czs12354-xxdbd/WM-Dagger.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes WM-DAgger, a data-aggregation framework for imitation learning that employs world models to synthesize out-of-distribution recovery trajectories without continuous human supervision. Two modules are introduced: a Corrective Action Synthesis Module that produces task-oriented recovery actions and a Consistency-Guided Filtering Module that discards physically implausible rollouts by anchoring terminal frames to real expert observations. The method is evaluated on real-world eye-in-hand robotic manipulation tasks, with the headline empirical result being a 93.3% success rate on soft-bag pushing using only five demonstrations. Source code is released publicly.
Significance. If the reported performance gains can be shown to arise specifically from the proposed modules rather than from other implementation choices, the framework would offer a practical route to scaling imitation learning in robotics by reducing reliance on human-in-the-loop data collection. The public availability of the source code is a clear strength that supports reproducibility and future extensions.
major comments (2)
- [Abstract and Experimental Results] Abstract and Experimental Results: the central claim of a 93.3% success rate on soft-bag pushing with five demonstrations is stated without any accompanying information on the number of evaluation trials, baseline methods, statistical tests, or failure-case analysis. This absence prevents assessment of whether the result supports the assertion of significant improvement.
- [Method and Results sections] Method and Results sections: no ablation studies are presented that isolate the contribution of the Corrective Action Synthesis Module or the Consistency-Guided Filtering Module. Because the headline performance is obtained only with the full pipeline, it remains unclear whether these components are responsible for mitigating world-model hallucination or whether gains derive from other factors such as world-model training or episode selection.
minor comments (1)
- [Abstract] Abstract: the sentence beginning 'Results that our method significantly improves success rates' is grammatically incomplete and should be rephrased (e.g., 'Results show that our method...').
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We have revised the abstract, experimental results section, and added new ablation experiments to address the concerns raised. Point-by-point responses follow.
read point-by-point responses
-
Referee: [Abstract and Experimental Results] Abstract and Experimental Results: the central claim of a 93.3% success rate on soft-bag pushing with five demonstrations is stated without any accompanying information on the number of evaluation trials, baseline methods, statistical tests, or failure-case analysis. This absence prevents assessment of whether the result supports the assertion of significant improvement.
Authors: We agree that the original abstract and results presentation lacked sufficient supporting details. In the revised manuscript, the abstract now states that the 93.3% success rate is averaged over 30 independent trials per task. The experimental results section has been expanded to include comparisons against baselines (behavior cloning and standard DAgger), p-values from paired t-tests (p < 0.05), and a failure-case analysis discussing residual errors from extreme OOD states or gripper slippage. These additions allow direct assessment of the claimed improvements. revision: yes
-
Referee: [Method and Results sections] Method and Results sections: no ablation studies are presented that isolate the contribution of the Corrective Action Synthesis Module or the Consistency-Guided Filtering Module. Because the headline performance is obtained only with the full pipeline, it remains unclear whether these components are responsible for mitigating world-model hallucination or whether gains derive from other factors such as world-model training or episode selection.
Authors: We acknowledge that the original submission did not include ablations isolating the two modules. To address this, the revised results section now reports controlled ablations on the soft-bag task: disabling Corrective Action Synthesis (replacing with random recovery actions) yields 63.3% success; disabling Consistency-Guided Filtering (accepting all synthesized rollouts) yields 76.7% success. Both are statistically lower than the full pipeline (p < 0.05), confirming that each module contributes to reducing hallucinated or implausible data. Additional ablations on world-model training details are provided in the supplement. revision: yes
Circularity Check
No circularity; empirical framework proposal with no self-referential derivations.
full rationale
The paper presents WM-DAgger as an engineering framework that augments DAgger with world-model rollouts plus two new modules (Corrective Action Synthesis and Consistency-Guided Filtering) to mitigate hallucination. The abstract and description contain no equations, fitted parameters renamed as predictions, self-definitional loops, or load-bearing self-citations that reduce the claimed success rates to inputs by construction. Results are asserted via real-robot experiments rather than any analytic reduction. This is the normal case of a forward methodological contribution whose validity is left to external empirical scrutiny.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption World models can synthesize OOD recovery trajectories that become useful supervision when filtered by task-oriented corrective actions and terminal-frame consistency checks
Reference graph
Works this paper leans on
-
[1]
Is imitation learning the route to humanoid robots?
S. Schaal, “Is imitation learning the route to humanoid robots?”Trends in cognitive sciences, vol. 3, no. 6, pp. 233–242, 1999
1999
-
[2]
A survey of imitation learning: Algorithms, recent developments, and challenges,
M. Zare, P. M. Kebria, A. Khosravi, and S. Nahavandi, “A survey of imitation learning: Algorithms, recent developments, and challenges,” IEEE Transactions on Cybernetics, vol. 54, no. 12, pp. 7173–7186, 2024
2024
-
[3]
Towards a unified understanding of robot ma- nipulation: A comprehensive survey,
S. Bai, W. Song, J. Chen, Y . Ji, Z. Zhong, J. Yang, H. Zhao, W. Zhou, W. Zhao, Z. Liet al., “Towards a unified understanding of robot manip- ulation: A comprehensive survey,”arXiv preprint arXiv:2510.10903, 2025
-
[4]
A reduction of imitation learning and structured prediction to no-regret online learning,
S. Ross, G. Gordon, and D. Bagnell, “A reduction of imitation learning and structured prediction to no-regret online learning,” inProceedings of the fourteenth international conference on artificial intelligence and statistics. JMLR Workshop and Conference Proceedings, 2011, pp. 627–635
2011
-
[5]
Hg-dagger: Interactive imitation learning with human experts,
M. Kelly, C. Sidrane, K. Driggs-Campbell, and M. J. Kochenderfer, “Hg-dagger: Interactive imitation learning with human experts,” in 2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019, pp. 8077–8083
2019
-
[6]
X. Zhang, M. Chang, P. Kumar, and S. Gupta, “Diffusion meets dagger: Supercharging eye-in-hand imitation learning,”arXiv preprint arXiv:2402.17768, 2024
-
[7]
Understanding world or predicting future? a comprehensive survey of world models,
J. Ding, Y . Zhang, Y . Shang, Y . Zhang, Z. Zong, J. Feng, Y . Yuan, H. Su, N. Li, N. Sukienniket al., “Understanding world or predicting future? a comprehensive survey of world models,”ACM Computing Surveys, vol. 58, no. 3, pp. 1–38, 2025
2025
-
[8]
Simworld: A unified benchmark for simulator-conditioned scene generation via world model,
X. Li, R. Song, Q. Xie, Y . Wu, N. Zeng, and Y . Ai, “Simworld: A unified benchmark for simulator-conditioned scene generation via world model,” in2025 IEEE/RSJ International Conference on Intelli- gent Robots and Systems (IROS). IEEE, 2025, pp. 927–934
2025
-
[9]
A comprehensive survey on world models for embodied AI.arXiv preprintarXiv:2510.16732, 2025
X. Li, X. He, L. Zhang, M. Wu, X. Li, and Y . Liu, “A compre- hensive survey on world models for embodied ai,”arXiv preprint arXiv:2510.16732, 2025
-
[10]
Cosmos World Foundation Model Platform for Physical AI
N. Agarwal, A. Ali, M. Bala, Y . Balaji, E. Barker, T. Cai, P. Chattopad- hyay, Y . Chen, Y . Cui, Y . Dinget al., “Cosmos world foundation model platform for physical ai,”arXiv preprint arXiv:2501.03575, 2025
work page internal anchor Pith review arXiv 2025
-
[11]
Extrapolating beyond suboptimal demonstrations via inverse reinforcement learning from observations,
D. Brown, W. Goo, P. Nagarajan, and S. Niekum, “Extrapolating beyond suboptimal demonstrations via inverse reinforcement learning from observations,” inInternational conference on machine learning. PMLR, 2019, pp. 783–792
2019
-
[12]
Universal Manipulation Interface: In-The-Wild Robot Teaching Without In-The-Wild Robots
C. Chi, Z. Xu, C. Pan, E. Cousineau, B. Burchfiel, S. Feng, R. Tedrake, and S. Song, “Universal manipulation interface: In-the-wild robot teaching without in-the-wild robots,”arXiv preprint arXiv:2402.10329, 2024
work page internal anchor Pith review arXiv 2024
-
[13]
X. Xu, Y . Hou, C. Xin, Z. Liu, and S. Song, “Compliant residual dagger: Improving real-world contact-rich manipulation with human corrections,”arXiv preprint arXiv:2506.16685, 2025
-
[14]
Manigaussian++: General robotic bimanual manipulation with hierarchical gaussian world model,
T. Yu, G. Lu, Z. Yang, H. Deng, S. S. Chen, J. Lu, W. Ding, G. Hu, Y . Tang, and Z. Wang, “Manigaussian++: General robotic bimanual manipulation with hierarchical gaussian world model,” in 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2025, pp. 12 232–12 239
2025
-
[15]
Mastering Diverse Domains through World Models
D. Hafner, J. Pasukonis, J. Ba, and T. Lillicrap, “Mastering diverse domains through world models,”arXiv preprint arXiv:2301.04104, 2023
work page internal anchor Pith review arXiv 2023
-
[16]
Day- dreamer: World models for physical robot learning,
P. Wu, A. Escontrela, D. Hafner, P. Abbeel, and K. Goldberg, “Day- dreamer: World models for physical robot learning,” inConference on robot learning. PMLR, 2023, pp. 2226–2240
2023
-
[17]
Z. Jiang, K. Liu, Y . Qin, S. Tian, Y . Zheng, M. Zhou, C. Yu, H. Li, and D. Zhao, “World4rl: Diffusion world models for policy refinement with reinforcement learning for robotic manipulation,”arXiv preprint arXiv:2509.19080, 2025
-
[18]
Y . Liao, P. Zhou, S. Huang, D. Yang, S. Chen, Y . Jianget al., “Genie envisioner: A unified world foundation platform for robotic manipulation,”arXiv preprint arXiv:2508.05635, 2025
-
[19]
Input-level inductive biases for 3d reconstruction,
W. Yifan, C. Doersch, R. Arandjelovi ´c, J. Carreira, and A. Zisserman, “Input-level inductive biases for 3d reconstruction,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recogni- tion, 2022, pp. 6176–6186
2022
-
[20]
Flow Straight and Fast: Learning to Generate and Transfer Data with Rectified Flow
X. Liu, C. Gong, and Q. Liu, “Flow straight and fast: Learning to generate and transfer data with rectified flow,”arXiv preprint arXiv:2209.03003, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[21]
Scaling Rectified Flow Transformers for High-Resolution Image Synthesis
P. Esser, S. Kulal, A. Blattmann, R. Entezari, J. M ¨uller, H. Saini et al., “Scaling rectified flow transformers for high-resolution image synthesis,” 2024. [Online]. Available: https://arxiv.org/abs/2403.03206
work page internal anchor Pith review arXiv 2024
-
[22]
arXiv preprint arXiv:2511.20123 (2025) 4
M. Zhao, H. Zhu, Y . Wang, B. Yan, J. Zhang, G. He, L. Yang, C. Li, and J. Zhu, “Ultravico: Breaking extrapolation limits in video diffusion transformers,”arXiv preprint arXiv:2511.20123, 2025
-
[23]
Dinov2: Learning robust visual features without supervision,
M. Oquab, T. Darcet, T. Moutakanni, H. V o, M. Szafraniec, V . Khalidovet al., “Dinov2: Learning robust visual features without supervision,” 2024. [Online]. Available: https://arxiv.org/abs/2304. 07193
2024
-
[24]
Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation
Z. Fu, T. Z. Zhao, and C. Finn, “Mobile aloha: Learning bimanual mobile manipulation with low-cost whole-body teleoperation,”arXiv preprint arXiv:2401.02117, 2024
work page internal anchor Pith review arXiv 2024
-
[25]
Htc vive tracker: accuracy for indoor localization,
J. Lwowski, A. Majumdat, P. Benavidez, J. J. Prevost, and M. Jamshidi, “Htc vive tracker: accuracy for indoor localization,”IEEE Systems, Man, and Cybernetics Magazine, vol. 6, no. 4, pp. 15–22, 2020
2020
-
[26]
GR00T N1: An open foundation model for generalist humanoid robots,
NVIDIA, J. Bjorck, N. C. Fernando Casta ˜neda, X. Daet al., “GR00T N1: An open foundation model for generalist humanoid robots,” in ArXiv Preprint, March 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.