Recognition: unknown
Micro-Dexterity in Biological Micromanipulation: Embodiment, Perception, and Control
Pith reviewed 2026-05-10 15:25 UTC · model grok-4.3
The pith
Micro-dexterity framework couples embodiment, perception, and control to explain and advance biological micromanipulation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
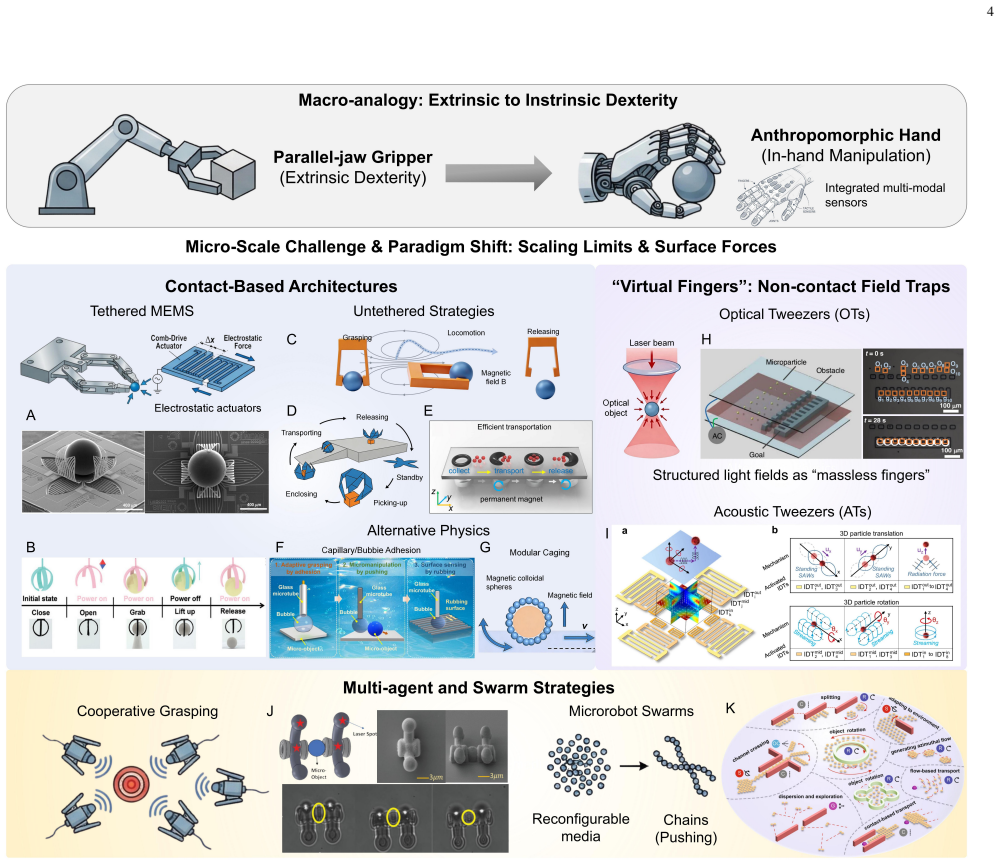
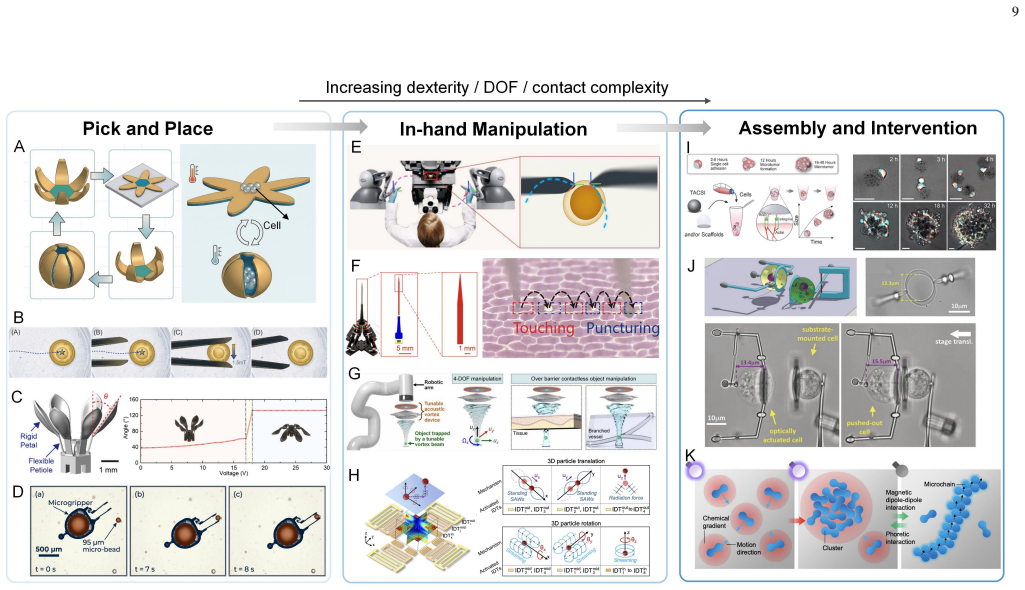
Micro-dexterity is defined as the coupled operation of embodiment, perception, and control that lets manipulation primitives be realized at microscale despite negligible inertia, dominant interfacial forces, and fragile biological objects. The framework is used to compare contact-based micromanipulators, contactless field systems, and multi-agent platforms, to describe how pushing, grasping, and cooperative tasks must be re-expressed, and to locate the dexterity gap that still separates laboratory results from clinically relevant biological manipulation.
What carries the argument
The micro-dexterity framework, which analyzes every micromanipulation system through the interdependent roles of physical embodiment, environmental perception, and closed-loop control in fluid-dominated, surface-dominated settings.
If this is right
- Classical primitives such as grasping and cooperative manipulation must be rewritten for soft, heterogeneous targets and dominant surface forces rather than rigid contact.
- Each of the three platform architectures (embodied, field-mediated, externally actuated) enables distinct subsets of the reformulated primitives.
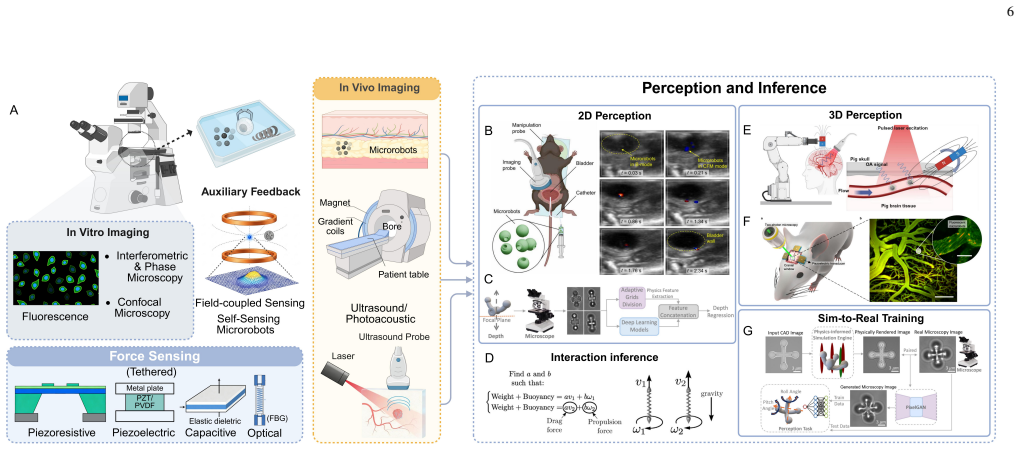
- Perception and control strategies must compensate for the loss of rich proprioception that macroscale manipulators take for granted.
- Closing the documented dexterity gap is required before micro-manipulation techniques can move from controlled laboratory settings into routine biomedical use.
Where Pith is reading between the lines
- Hybrid platforms that combine physical contact with field-mediated forces could be systematically evaluated by asking how each addition changes the required perception and control layers.
- The framework suggests that advances in integrated micro-scale sensing may be more decisive for closing the dexterity gap than further improvements in actuation alone.
- Principles of micro-dexterity may also apply to other confined, low-inertia domains such as microfluidic cell sorting or in-vivo targeted delivery, even when the targets are not strictly biological.
Load-bearing premise
The three platform classes and the listed manipulation primitives together cover the full space of biological micromanipulation, so that the identified dexterity gap is the main remaining barrier to clinical translation.
What would settle it
A documented clinical procedure that performs precise, adaptive interaction with live biological micro-objects at scale without employing the coupled embodiment-perception-control approach described in the review.
Figures




read the original abstract
Microscale manipulation has advanced substantially in controlled locomotion and targeted transport, yet many biomedical applications require precise and adaptive interaction with biological micro-objects. At these scales, manipulation is realized through three main classes of platforms: embodied microrobots that physically interact as mobile agents, field-mediated systems that generate contactless trapping or manipulation forces, and externally actuated end-effectors that interact through remotely driven physical tools. Unlike macroscale manipulators, these systems function in fluidic, confined, and surface-dominated environments characterized by negligible inertia, dominant interfacial forces, and soft, heterogeneous, and fragile targets. Consequently, classical assumptions of dexterous manipulation, including rigid-body contact, stable grasping, and rich proprioceptive feedback, become difficult to maintain. This review introduces micro-dexterity as a framework for analyzing biological micromanipulation through the coupled roles of embodiment, perception, and control. We examine how classical manipulation primitives, including pushing, reorientation, grasping, and cooperative manipulation, are reformulated at the microscale; compare the architectures that enable them, from contact-based micromanipulators to contactless field-mediated systems and cooperative multi-agent platforms; and review the perception and control strategies required for task execution. We identify the current dexterity gap between laboratory demonstrations and clinically relevant biological manipulation, and outline key challenges for future translation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces micro-dexterity as a conceptual framework for analyzing biological micromanipulation, coupling embodiment, perception, and control. It classifies platforms into three main classes—embodied microrobots, field-mediated systems, and externally actuated end-effectors—and examines how classical primitives (pushing, reorientation, grasping, cooperative manipulation) are reformulated at microscale in fluidic, surface-dominated environments. The review covers perception and control strategies, identifies a dexterity gap between lab demonstrations and clinical needs, and outlines translation challenges.
Significance. If adopted, the framework offers a useful taxonomic lens for synthesizing microrobotics literature and highlighting scale-specific barriers to dexterous biological interaction. Its value is primarily organizational rather than predictive, potentially guiding integration of sensing, actuation, and control in future platforms.
major comments (1)
- [Platform Architectures section] The manuscript states that the three platform classes are the 'main' ones and that the listed primitives 'comprehensively cover' relevant behaviors, yet provides no systematic enumeration or exclusion criteria for hybrid or alternative approaches (e.g., combined field-contact systems). This assumption is load-bearing for the claim that the framework spans the space of biological micromanipulation.
minor comments (2)
- [Abstract and Introduction] The abstract and introduction use 'including' for the primitives without clarifying whether the four listed are exhaustive within the framework or merely illustrative; a brief explicit statement would improve precision.
- [Perception and Control Strategies] Several citations to prior work on field-mediated systems appear without contrasting quantitative performance metrics (e.g., force ranges or positioning precision) that would ground the dexterity-gap claim.
Simulated Author's Rebuttal
We thank the referee for the constructive review and positive recommendation for minor revision. The feedback on the platform architectures classification is well-taken and has prompted a targeted clarification in the revised manuscript.
read point-by-point responses
-
Referee: [Platform Architectures section] The manuscript states that the three platform classes are the 'main' ones and that the listed primitives 'comprehensively cover' relevant behaviors, yet provides no systematic enumeration or exclusion criteria for hybrid or alternative approaches (e.g., combined field-contact systems). This assumption is load-bearing for the claim that the framework spans the space of biological micromanipulation.
Authors: We agree that the original text did not explicitly define exclusion criteria or systematically address hybrids, which could strengthen the framework's scope. In the revised manuscript, we have added a dedicated paragraph in the Platform Architectures section that (1) states the classification criterion as the dominant interaction mechanism (embodied physical contact, field-mediated forces, or remotely actuated end-effectors), (2) notes that hybrid systems (e.g., magnetic-field-assisted contact pushing) are assigned to the class corresponding to their primary mode, and (3) provides two literature examples of such hybrids while indicating how the listed primitives extend to them. We retain the qualifier 'main' classes because the review focuses on established architectural paradigms rather than an exhaustive taxonomy; a full combinatorial enumeration lies outside the paper's conceptual scope. The primitives are presented as the core set reformulated from classical manipulation, not as an exhaustive list, consistent with the 'including' phrasing in the abstract. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper is a conceptual review that introduces micro-dexterity as a synthetic framework coupling embodiment, perception, and control for classifying existing micromanipulation platforms and primitives. It contains no equations, derivations, fitted parameters, or quantitative predictions. The three platform classes and four primitives are presented as an organizing lens rather than a partition derived from or reducing to the paper's own inputs. No self-citation chains or ansatzes are load-bearing for the central claim, which remains taxonomic and independent of any internal reduction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Classical assumptions of dexterous manipulation (rigid-body contact, stable grasping, rich proprioceptive feedback) become difficult to maintain at the microscale due to negligible inertia, dominant interfacial forces, and soft heterogeneous targets.
invented entities (1)
-
micro-dexterity
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Advanced medical micro-robotics for early diagnosis and therapeutic interventions,
D. Zhang, T. E. Gorochowski, L. Marucci, H.-T. Lee, B. Gil, B. Li, S. Hauert, and E. Yeatman, “Advanced medical micro-robotics for early diagnosis and therapeutic interventions,”Frontiers in Robotics and AI, vol. 9, p. 1086043, 2023
2023
-
[2]
3d-printed microrobots from design to translation,
S. R. Dabbagh, M. R. Sarabi, M. T. Birtek, S. Seyfi, M. Sitti, and S. Tasoglu, “3d-printed microrobots from design to translation,”Nature Communications, vol. 13, no. 1, p. 5875, 2022
2022
-
[3]
A review on microrobots driven by optical and magnetic fields,
Y . Hou, H. Wang, R. Fu, X. Wang, J. Yu, S. Zhang, Q. Huang, Y . Sun, and T. Fukuda, “A review on microrobots driven by optical and magnetic fields,”Lab on a Chip, vol. 23, no. 5, pp. 848–868, 2023
2023
-
[4]
Magnetic microrobots for in vivo cargo delivery: A review,
J. Lin, Q. Cong, and D. Zhang, “Magnetic microrobots for in vivo cargo delivery: A review,”Micromachines, vol. 15, no. 5, p. 664, 2024
2024
-
[5]
Clinically ready magnetic microrobots for targeted therapies,
F. C. Landers, L. Hertle, V . Pustovalov, D. Sivakumaran, C. M. Oral, O. Brinkmann, K. Meiners, P. Theiler, V . Gantenbein, A. Vecianaet al., “Clinically ready magnetic microrobots for targeted therapies,”Science, vol. 390, no. 6774, pp. 710–715, 2025. 13
2025
-
[6]
An overview of dexterous manipulation,
A. M. Okamura, N. Smaby, and M. R. Cutkosky, “An overview of dexterous manipulation,” inProceedings 2000 ICRA. Millennium Con- ference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), vol. 1. IEEE, 2000, pp. 255–262
2000
-
[7]
Dexterous manipulation for multi-fingered robotic hands with reinforcement learning: A review,
C. Yu and P. Wang, “Dexterous manipulation for multi-fingered robotic hands with reinforcement learning: A review,”Frontiers in Neuro- robotics, vol. 16, p. 861825, 2022
2022
-
[8]
Dexterous manipulation through imitation learning: A survey,
S. An, Z. Meng, C. Tang, Y . Zhou, T. Liu, F. Ding, S. Zhang, Y . Mu, R. Song, W. Zhanget al., “Dexterous manipulation through imitation learning: A survey,”arXiv preprint arXiv:2504.03515, 2025
-
[9]
Fundamentals and applications of inertial microfluidics: a review
J. Zhang, S. Yan, D. Yuan, G. Alici, N. Nguyen, M. E. Warkiani, and W. Li, “Fundamentals and applications of inertial microfluidics: a review.”Lab on a chip, vol. 16 1, pp. 10–34, 2016
2016
-
[10]
Roadmap on embodying mechano-intelligence and computing in functional materi- als and structures,
A. Al `u, A. F. Arrieta, E. Del Dottore, M. Dickey, S. Ferracin, R. Harne, H. Hauser, Q. He, J. B. Hopkins, L. P. Hyattet al., “Roadmap on embodying mechano-intelligence and computing in functional materi- als and structures,”Smart Materials and Structures, vol. 34, no. 6, p. 063501, 2025
2025
-
[11]
Soft magnetic microrobots with remote sensing and communication capabilities,
Q. Gao, M. Kim, D. V on Arx, E. Zhang, X. Zhang, H. Ye, C. V ogt, C. Ehmke, D. Corsino, F. Cataniaet al., “Soft magnetic microrobots with remote sensing and communication capabilities,”Nature Commu- nications, vol. 16, no. 1, p. 10489, 2025
2025
-
[12]
Embodied cross-domain intelligence in biomedical microrobots: A review,
Z. Tan, L. Wei, K. Lu, and D. Zhang, “Embodied cross-domain intelligence in biomedical microrobots: A review,”Cyborg and Bionic Systems
-
[13]
Physical intelligence in small-scale robots and machines,
H. Chen and M. Sitti, “Physical intelligence in small-scale robots and machines,”Advanced Materials, p. e10332, 2025
2025
-
[14]
Materials consideration for the design, fabrication and operation of microscale robots,
C. Chen, S. Ding, and J. Wang, “Materials consideration for the design, fabrication and operation of microscale robots,”Nature Reviews Materials, vol. 9, no. 3, pp. 159–172, 2024
2024
-
[15]
Actuation of mobile microbots: a review,
H. Hussein, A. Damdam, L. Ren, Y . Obeid Charrouf, J. Challita, M. Zwain, and H. Fariborzi, “Actuation of mobile microbots: a review,” Advanced Intelligent Systems, vol. 5, no. 9, p. 2300168, 2023
2023
-
[16]
Control and autonomy of microrobots: Recent progress and perspective,
J. Jiang, Z. Yang, A. Ferreira, and L. Zhang, “Control and autonomy of microrobots: Recent progress and perspective,”Advanced Intelligent Systems, vol. 4, no. 5, p. 2100279, 2022
2022
-
[17]
Soft bio- microrobots: Toward biomedical applications,
Z. Wang, A. Klingner, V . Magdanz, S. Misra, and I. S. Khalil, “Soft bio- microrobots: Toward biomedical applications,”Advanced Intelligent Systems, vol. 6, no. 2, p. 2300093, 2024
2024
-
[18]
Hands for dexterous manipulation and robust grasping: A difficult road toward simplicity,
A. Bicchi, “Hands for dexterous manipulation and robust grasping: A difficult road toward simplicity,”IEEE Transactions on robotics and automation, vol. 16, no. 6, pp. 652–662, 2002
2002
-
[19]
Review on human- like robot manipulation using dexterous hands
S. K. Sampath, N. Wang, H. Wu, and C. Yang, “Review on human- like robot manipulation using dexterous hands.”Cogn. Comput. Syst., vol. 5, no. 1, pp. 14–29, 2023
2023
-
[20]
Magicgripper: A mini- magictac integrated gripper enabling multimodal perception in contact- rich manipulation,
W. Fan, H. Li, Q. Cong, and D. Zhang, “Magicgripper: A mini- magictac integrated gripper enabling multimodal perception in contact- rich manipulation,”IEEE Transactions on Automation Science and Engineering, vol. 22, pp. 24 311–24 332, 2025
2025
-
[21]
A century of robotic hands,
C. Piazza, G. Grioli, M. G. Catalano, and A. Bicchi, “A century of robotic hands,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 2, no. 1, pp. 1–32, 2019
2019
-
[22]
Crystaltac: Vision-based tactile sensor family fabricated via rapid monolithic manufacturing,
W. Fan, H. Li, and D. Zhang, “Crystaltac: Vision-based tactile sensor family fabricated via rapid monolithic manufacturing,”Cyborg and Bionic Systems, vol. 6, p. 0231, 2025
2025
-
[23]
Visual-tactile pretraining and online multitask learning for humanlike manipulation dexterity,
Q. Ye, Q. Liu, S. Wang, J. Chen, Y . Cui, K. Jin, H. Chen, X. Cai, G. Li, and J. Chen, “Visual-tactile pretraining and online multitask learning for humanlike manipulation dexterity,”Science Robotics, vol. 11, no. 110, p. eady2869, 2026
2026
-
[24]
A review on sensory perception for dexterous robotic manipulation,
Z. Xia, Z. Deng, B. Fang, Y . Yang, and F. Sun, “A review on sensory perception for dexterous robotic manipulation,”International Journal of Advanced Robotic Systems, vol. 19, no. 2, p. 17298806221095974, 2022
2022
-
[25]
Visual dexterity: In-hand reorientation of novel and complex object shapes,
T. Chen, M. Tippur, S. Wu, V . Kumar, E. Adelson, and P. Agrawal, “Visual dexterity: In-hand reorientation of novel and complex object shapes,”Science Robotics, vol. 8, no. 84, p. eadc9244, 2023
2023
-
[26]
Precise and dexterous robotic manipulation via human-in-the-loop reinforcement learning,
J. Luo, C. Xu, J. Wu, and S. Levine, “Precise and dexterous robotic manipulation via human-in-the-loop reinforcement learning,”Science Robotics, vol. 10, no. 105, p. eads5033, 2025
2025
-
[27]
Mujoco: A physics engine for model-based control,
E. Todorov, T. Erez, and Y . Tassa, “Mujoco: A physics engine for model-based control,” in2012 IEEE/RSJ international conference on intelligent robots and systems. IEEE, 2012, pp. 5026–5033
2012
-
[28]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
V . Makoviychuk, L. Wawrzyniak, Y . Guo, M. Lu, K. Storey, M. Mack- lin, D. Hoeller, N. Rudin, A. Allshire, A. Handaet al., “Isaac gym: High performance gpu-based physics simulation for robot learning,” arXiv preprint arXiv:2108.10470, 2021
work page internal anchor Pith review arXiv 2021
-
[29]
Life at low reynolds number,
E. M. Purcell, “Life at low reynolds number,” inPhysics and our world: reissue of the proceedings of a symposium in honor of Victor F Weisskopf. World Scientific, 2014, pp. 47–67
2014
-
[30]
Capillary pick-and- place of glass microfibers,
B. Chang, B. K. Wang, J. L. Jin, and Q. Zhou, “Capillary pick-and- place of glass microfibers,”IEEE Access, vol. 9, pp. 15 074–15 083, 2021
2021
-
[31]
Roadmap for clinical translation of mobile microrobotics,
U. Bozuyuk, P. Wrede, E. Yildiz, and M. Sitti, “Roadmap for clinical translation of mobile microrobotics,”Advanced Materials, vol. 36, no. 23, p. 2311462, 2024
2024
-
[32]
Ai- enhanced biomedical micro/nanorobots in microfluidics,
H. Dong, J. Lin, Y . Tao, Y . Jia, L. Sun, W. J. Li, and H. Sun, “Ai- enhanced biomedical micro/nanorobots in microfluidics,”Lab on a Chip, vol. 24, no. 5, pp. 1419–1440, 2024
2024
-
[33]
Ultrasound trapping and navigation of microrobots in the mouse brain vasculature,
A. Del Campo Fonseca, C. Gl ¨uck, J. Droux, Y . Ferry, C. Frei, S. Wegener, B. Weber, M. El Amki, and D. Ahmed, “Ultrasound trapping and navigation of microrobots in the mouse brain vasculature,” Nature Communications, vol. 14, no. 1, p. 5889, 2023
2023
-
[34]
Human- scale navigation of magnetic microrobots in hepatic arteries,
N. Li, P. Fei, C. Tous, M. Rezaei Adariani, M.-L. Hautot, I. Ouedraogo, A. Hadjadj, I. P. Dimov, Q. Zhang, S. Lessardet al., “Human- scale navigation of magnetic microrobots in hepatic arteries,”Science Robotics, vol. 9, no. 87, p. eadh8702, 2024
2024
-
[35]
Enhance in-hand dexterous micromanipulation by exploiting adhesion forces,
J.-A. Seon, R. Dahmouche, and M. Gauthier, “Enhance in-hand dexterous micromanipulation by exploiting adhesion forces,”IEEE Transactions on Robotics, vol. 34, no. 1, pp. 113–125, 2017
2017
-
[36]
A microgripper based on electrothermal al–sio2 bimorphs,
H. Yang, Y . Lu, Y . Ding, Z. Zhang, A. Ren, H. Wang, X. Wang, J. Li, S. Zhang, and H. Xie, “A microgripper based on electrothermal al–sio2 bimorphs,”Microsystems & Nanoengineering, vol. 10, no. 1, p. 195, 2024
2024
-
[37]
High-load shape memory microgripper with embedded resistive heating and magnetic actuation,
S. Wu, Y . Liu, Y . Zhang, L. Zeng, J. Fang, C. Chen, C. Zhang, D. Wu, Z. Lao, and H. Xia, “High-load shape memory microgripper with embedded resistive heating and magnetic actuation,”Advanced Functional Materials, vol. 35, 2025
2025
-
[38]
Reconfig- urable multifunctional ferrofluid droplet robots,
X. Fan, X. Dong, A. C. Karacakol, H. Xie, and M. Sitti, “Reconfig- urable multifunctional ferrofluid droplet robots,”Proceedings of the National Academy of Sciences, vol. 117, no. 45, pp. 27 916–27 926, 2020
2020
-
[39]
Bubbles acting as micro end-effectors for dex- terous manipulation and sensing in aqueous environment,
Z. Xu and Q. Xu, “Bubbles acting as micro end-effectors for dex- terous manipulation and sensing in aqueous environment,”Advanced Intelligent Systems, vol. 7, no. 3, p. 2400486, 2025
2025
-
[40]
Automated and collision-free navigation of multiple micro-objects in obstacle-dense microenvironments using optoelectronic tweezers,
L. Zheng, G. Li, H. Du, Z. Li, B. Xu, F. Yang, Y . Mao, J. Wei, H. Xie, W. Xieet al., “Automated and collision-free navigation of multiple micro-objects in obstacle-dense microenvironments using optoelectronic tweezers,”Microsystems & Nanoengineering, vol. 11, no. 1, p. 49, 2025
2025
-
[41]
Movable surface acoustic wave tweezers: a versatile toolbox for micromanipulation,
X. Qin, X. Liu, S. Liu, C. Zhang, N. Bai, X. Li, W. Wang, D. Liu, Q. Yang, R. Yanget al., “Movable surface acoustic wave tweezers: a versatile toolbox for micromanipulation,”Microsystems & Nanoengi- neering, vol. 10, no. 1, p. 155, 2024
2024
-
[42]
Distributed force control for microrobot manipulation via planar multi-spot optical tweezer,
D. Zhang, A. Barbot, B. Lo, and G.-Z. Yang, “Distributed force control for microrobot manipulation via planar multi-spot optical tweezer,” Advanced Optical Materials, vol. 8, no. 21, p. 2000543, 2020
2020
-
[43]
Microrobot collectives with reconfigurable morphologies, behaviors, and func- tions,
G. Gardi, S. Ceron, W. Wang, K. Petersen, and M. Sitti, “Microrobot collectives with reconfigurable morphologies, behaviors, and func- tions,”Nature communications, vol. 13, no. 1, p. 2239, 2022
2022
-
[44]
Review on human-like robot manipulation using dexterous hands,
S. Kadalagere Sampath, N. Wang, H. Wu, and C. Yang, “Review on human-like robot manipulation using dexterous hands,”Cognitive Computation and Systems, vol. 5, no. 1, pp. 14–29, 2023
2023
-
[45]
A comprehensive review of robot intelligent grasping based on tactile perception,
T. Li, Y . Yan, C. Yu, J. An, Y . Wang, and G. Chen, “A comprehensive review of robot intelligent grasping based on tactile perception,” Robotics and Computer-Integrated Manufacturing, vol. 90, p. 102792, 2024
2024
-
[46]
Tacfr-gripper: A reconfigurable fin-ray-based gripper with tactile skin for in-hand manipulation,
Q. Cong, W. Fan, and D. Zhang, “Tacfr-gripper: A reconfigurable fin-ray-based gripper with tactile skin for in-hand manipulation,” in Actuators, vol. 13, no. 12. MDPI, 2024, p. 521
2024
-
[47]
An electrostatically actuated mems microgripper with high amplification for precision manipulation,
Y . Algoos, W. B. Lenz, F. Khan, and M. I. Younis, “An electrostatically actuated mems microgripper with high amplification for precision manipulation,”Sensors and Actuators A: Physical, vol. 378, p. 115800, 2024
2024
-
[48]
Design of a piezoelectric-driven mi- crogripper with three working modes,
Z. Guo, Z. Lyu, and Q. Xu, “Design of a piezoelectric-driven mi- crogripper with three working modes,”IEEE/ASME Transactions on Mechatronics, vol. 29, no. 1, pp. 260–270, 2023
2023
-
[49]
An electrothermally actuated high amplification mems mi- crogripper with integrated capacitive sensing for micromanipulation,
S. Hussain, H. Elahi, H. Jabbar, A. Hamza, U. S. Khan, and M. M. Saleem, “An electrothermally actuated high amplification mems mi- crogripper with integrated capacitive sensing for micromanipulation,” Sensors and Actuators A: Physical, p. 117038, 2025
2025
-
[50]
Three-dimensional programmable assembly by untethered magnetic robotic micro-grippers,
E. Diller and M. Sitti, “Three-dimensional programmable assembly by untethered magnetic robotic micro-grippers,”Advanced Functional Materials, vol. 24, no. 28, pp. 4397–4404, 2014. 14
2014
-
[51]
Enhanced automated cell micromanipulation via programmable magnetic microgripper design,
Y . Zhang, F. Wang, Y . Ye, X. Guo, X. Wang, A. Knoll, Y . Wang, C. Dai, Y . Ying, and M. Zhou, “Enhanced automated cell micromanipulation via programmable magnetic microgripper design,”IEEE Transactions on Automation Science and Engineering, 2024
2024
-
[52]
Millimeter-scale flexible robots with programmable three-dimensional magnetization and motions,
T. Xu, J. Zhang, M. Salehizadeh, O. Onaizah, and E. Diller, “Millimeter-scale flexible robots with programmable three-dimensional magnetization and motions,”Science Robotics, vol. 4, no. 29, p. eaav4494, 2019
2019
-
[53]
Fab- rication and characterization of self-folding thermoplastic sheets using unbalanced thermal shrinkage,
C. Danielson, A. Mehrnezhad, A. YekrangSafakar, and K. Park, “Fab- rication and characterization of self-folding thermoplastic sheets using unbalanced thermal shrinkage,”Soft Matter, vol. 13, no. 23, pp. 4224– 4230, 2017
2017
-
[54]
3d printed magnetically-actuating micro-gripper operates in air and water,
G. Shao, H. O. T. Ware, J. Huang, R. Hai, L. Li, and C. Sun, “3d printed magnetically-actuating micro-gripper operates in air and water,” Additive Manufacturing, vol. 38, p. 101834, 2021
2021
-
[55]
Design of a versatile microrobot for cargo delivery,
H. Zhao, J. Li, Z. Chen, Q. Zhang, M. Yang, and D. Sun, “Design of a versatile microrobot for cargo delivery,”IEEE/ASME Transactions on Mechatronics, vol. 29, no. 4, pp. 2463–2474, 2023
2023
-
[56]
Light-driven soft microrobots based on hydrogels and lces: development and prospects,
Y . Gao, X. Wang, and Y . Chen, “Light-driven soft microrobots based on hydrogels and lces: development and prospects,”RSC advances, vol. 14, no. 20, pp. 14 278–14 288, 2024
2024
-
[57]
Multifunc- tional thermo-magnetically actuated hybrid soft millirobot based on 4d printing,
X. Hu, Z. Ge, X. Wang, N. Jiao, S. Tung, and L. Liu, “Multifunc- tional thermo-magnetically actuated hybrid soft millirobot based on 4d printing,”Composites Part B: Engineering, vol. 228, p. 109451, 2022
2022
-
[58]
Hybrid optothermal-magnetic mobile microgripper for in-liquid micromanip- ulation,
B. Ahmad, A. Barbot, G. Ulliac, and A. Bolopion, “Hybrid optothermal-magnetic mobile microgripper for in-liquid micromanip- ulation,”IEEE Robotics and Automation Letters, vol. 8, no. 3, pp. 1675–1682, 2023
2023
-
[59]
Nanoporous capillary gripper for ultragentle micro-object manipula- tion,
S. J. Kim, T. Kim, H. J. Ryu, J.-h. Jeong, A. J. Hart, and S. Kim, “Nanoporous capillary gripper for ultragentle micro-object manipula- tion,”Advanced Science, p. e08338, 2025
2025
-
[60]
Fluidic torque–enabled object manipulation by microrobot collectives,
S. Ceron, G. Gardi, K. Petersen, and M. Sitti, “Fluidic torque–enabled object manipulation by microrobot collectives,”Science Advances, vol. 12, no. 9, p. eaea9947, 2026
2026
-
[61]
Fabrication and optical manipulation of micro-robots for biomedical applications,
D. Zhang, Y . Ren, A. Barbot, F. Seichepine, B. Lo, Z.-C. Ma, and G.-Z. Yang, “Fabrication and optical manipulation of micro-robots for biomedical applications,”Matter, vol. 5, no. 10, pp. 3135–3160, 2022
2022
-
[62]
Manipulation of large, irregular-shape particles using contour-tracking optical tweezers,
R. Omine, S. Masui, S. Kadoya, M. Michihata, and S. Takahashi, “Manipulation of large, irregular-shape particles using contour-tracking optical tweezers,”Optics Letters, vol. 49, no. 10, pp. 2773–2776, 2024
2024
-
[63]
A hybrid dielectrophoretic trap–optical tweezers platform for manipulating microparticles in aque- ous suspension,
C. D. Gonz ´alez-G´omez, J. Garcia-Guirado, R. Quidant, F. Carrique, E. Ruiz-Reina, and R. A. Rica-Alarc ´on, “A hybrid dielectrophoretic trap–optical tweezers platform for manipulating microparticles in aque- ous suspension,”Lab on a Chip, vol. 25, no. 10, pp. 2462–2474, 2025
2025
-
[64]
Intracellular manipulation and measurement with multipole magnetic tweezers,
X. Wang, C. Ho, Y . Tsatskis, J. Law, Z. Zhang, M. Zhu, C. Dai, F. Wang, M. Tan, S. Hopyanet al., “Intracellular manipulation and measurement with multipole magnetic tweezers,”Science robotics, vol. 4, no. 28, p. eaav6180, 2019
2019
-
[65]
High-speed intracellular magnetic tweezers with digital pid controller,
A. W. Miyamoto, R. Orii, H. Tanimoto, and Y . Murayama, “High-speed intracellular magnetic tweezers with digital pid controller,”Applied Physics Letters, vol. 128, no. 8, 2026
2026
-
[66]
In-petri-dish acoustic vortex tweezers,
T. Li, Y . Du, B. Cai, M. R. Brooks, C. Qiu, Z. Wang, J. Li, L. Bo, Y . A. Pan, and Z. Tian, “In-petri-dish acoustic vortex tweezers,”Lab on a Chip, 2025
2025
-
[67]
Joint subarray acoustic tweezers enable controllable cell translation, rotation, and deformation,
L. Shen, Z. Tian, K. Yang, J. Rich, J. Xia, N. Upreti, J. Zhang, C. Chen, N. Hao, Z. Peiet al., “Joint subarray acoustic tweezers enable controllable cell translation, rotation, and deformation,”Nature Communications, vol. 15, no. 1, p. 9059, 2024
2024
-
[68]
Floating magnetic microrobots for fiber functionalization,
A. Barbot, H. Tan, M. Power, F. Seichepine, and G.-Z. Yang, “Floating magnetic microrobots for fiber functionalization,”Science Robotics, vol. 4, no. 34, p. eaax8336, 2019
2019
-
[69]
Reconfigurable magnetic microrobot swarm: Multimode transformation, locomotion, and manipulation,
H. Xie, M. Sun, X. Fan, Z. Lin, W. Chen, L. Wang, L. Dong, and Q. He, “Reconfigurable magnetic microrobot swarm: Multimode transformation, locomotion, and manipulation,”Science robotics, vol. 4, no. 28, p. eaav8006, 2019
2019
-
[70]
Colloidal tubular microrobots for cargo transport and compression,
X. Wang, B. Sprinkle, H. K. Bisoyi, T. Yang, L. Chen, S. Huang, and Q. Li, “Colloidal tubular microrobots for cargo transport and compression,”Proceedings of the National Academy of Sciences, vol. 120, no. 37, p. e2304685120, 2023
2023
-
[71]
Real-time color flow mapping of ultrasound microrobots,
C. Dillinger, A. Rasaiah, A. V ogel, C. Bahou, K. Monastyrskaya, A. H. Gheinani, and D. Ahmed, “Real-time color flow mapping of ultrasound microrobots,”Science Advances, vol. 11, no. 29, p. eadt8887, 2025
2025
-
[72]
Physics-informed machine learning with adaptive grids for optical microrobot depth estimation,
L. Wei, L. Genoud, and D. Zhang, “Physics-informed machine learning with adaptive grids for optical microrobot depth estimation,” in2025 IEEE International Conference on Cyborg and Bionic Systems (CBS). IEEE, 2025, pp. 1–6
2025
-
[73]
Helical microrobot for force sensing inside microfluidic chip,
A. Barbot, D. Decanini, and G. Hwang, “Helical microrobot for force sensing inside microfluidic chip,”Sensors and Actuators A: Physical, vol. 266, pp. 258–272, 2017
2017
-
[74]
Optoacoustic- guided magnetic microrobot platform for precision drug delivery,
F. Wang, E. Yildiz, X. L. De ´an-Ben, Y . Yu, D. Nozdriukhin, W. Kang, S. Zhang, J. Zinnanti, D. Sheehan, R. H. Soonet al., “Optoacoustic- guided magnetic microrobot platform for precision drug delivery,” Advanced Materials, p. e11870, 2025
2025
-
[75]
Z. Tan, L. Wei, and D. Zhang, “Physics-informed machine learning for efficient sim-to-real data augmentation in micro-object pose esti- mation,”arXiv preprint arXiv:2511.16494, 2025
-
[76]
An overview of microrobotic systems for microforce sens- ing,
G. Adam, M. Boudaoud, V . Reynaud, J. Agnus, D. J. Cappelleri, and C. Cl ´evy, “An overview of microrobotic systems for microforce sens- ing,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 7, 2024
2024
-
[77]
Screen-printed resistive tactile sensor for monitor- ing tissue interaction forces on a surgical magnetic microgripper,
D. A. Aubeeluck, C. Forbrigger, S. M. Taromsari, T. Chen, E. Diller, and H. E. Naguib, “Screen-printed resistive tactile sensor for monitor- ing tissue interaction forces on a surgical magnetic microgripper,”ACS Applied Materials & Interfaces, vol. 15, no. 28, pp. 34 008–34 022, 2023
2023
-
[78]
Nonlinearity synergy: An elegant strategy for realizing high-sensitivity and wide-linear-range pressure sensing,
R. Chen, T. Luo, J. Wang, R. Wang, C. Zhang, Y . Xie, L. Qin, H. Yao, and W. Zhou, “Nonlinearity synergy: An elegant strategy for realizing high-sensitivity and wide-linear-range pressure sensing,” Nature communications, vol. 14, no. 1, p. 6641, 2023
2023
-
[79]
Mems piezoelectric sensor for self- powered devices: A review,
M. Sawane and M. Prasad, “Mems piezoelectric sensor for self- powered devices: A review,”Materials Science in Semiconductor Processing, vol. 158, p. 107324, 2023
2023
-
[80]
Piezoelectric biosensor based on ultrasensitive mems system,
J.-H. He, C.-H. He, M.-Y . Qian, and A. A. Alsolami, “Piezoelectric biosensor based on ultrasensitive mems system,”Sensors and Actuators A: Physical, vol. 376, p. 115664, 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.