Stability Principle Underlying Passive Dynamic Walking of Rimless Wheel
Pith reviewed 2026-05-10 13:05 UTC · model grok-4.3
The pith
A rimless wheel's passive walking gait driven only by gravity is always asymptotically stable and one-periodic because the model automatically satisfies constraints on impact posture and restored mechanical energy.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
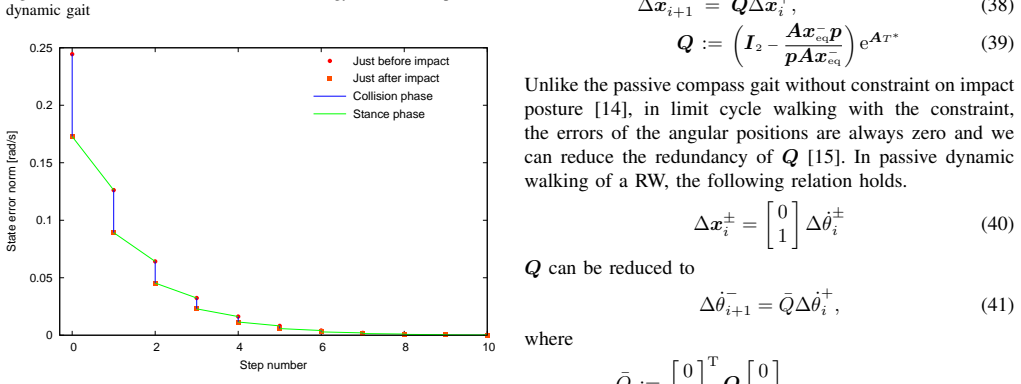
The passive gait generated only by gravity effect always becomes asymptotically stable and 1-period because a rimless wheel automatically achieves the two necessary conditions for guaranteeing the asymptotic stability; one is the constraint on impact posture and the other is the constraint on restored mechanical energy. The asymptotic stability is then easily shown by the recurrence formula of kinetic energy after reconsidering the stance-phase stability via linearization of the equation of motion and its relation to the energy conservation law.
What carries the argument
Linearization of the stance-phase equation of motion around the nominal trajectory together with the resulting recurrence formula for kinetic energy that encodes the impact-posture and energy-restoration constraints.
If this is right
- The gait converges to a unique one-periodic asymptotically stable limit cycle for any slope angle permitting walking.
- No active torque or feedback is required to enforce periodicity or stability in this model.
- The same two automatic constraints suffice to prove stability from the kinetic-energy recurrence alone.
- The stance-phase linearization directly reveals how energy conservation produces the observed convergence rate.
Where Pith is reading between the lines
- The posture-plus-energy mechanism may generalize to explain stability in more complex passive bipeds that also rely on gravity.
- Designers of energy-efficient walking robots could deliberately enforce similar geometric and energy constraints to obtain passive stability.
- A fully nonlinear global analysis of the hybrid system could test whether the linear recurrence remains predictive far from the nominal trajectory.
Load-bearing premise
Linearizing the stance-phase dynamics around the nominal trajectory captures the global asymptotic stability without significant nonlinear effects or parameter-specific deviations.
What would settle it
A numerical simulation or physical experiment in which a rimless wheel gait becomes multi-periodic or diverges even though the impact posture angle and post-impact energy restoration remain exactly satisfied at every step would falsify the claim.
Figures
read the original abstract
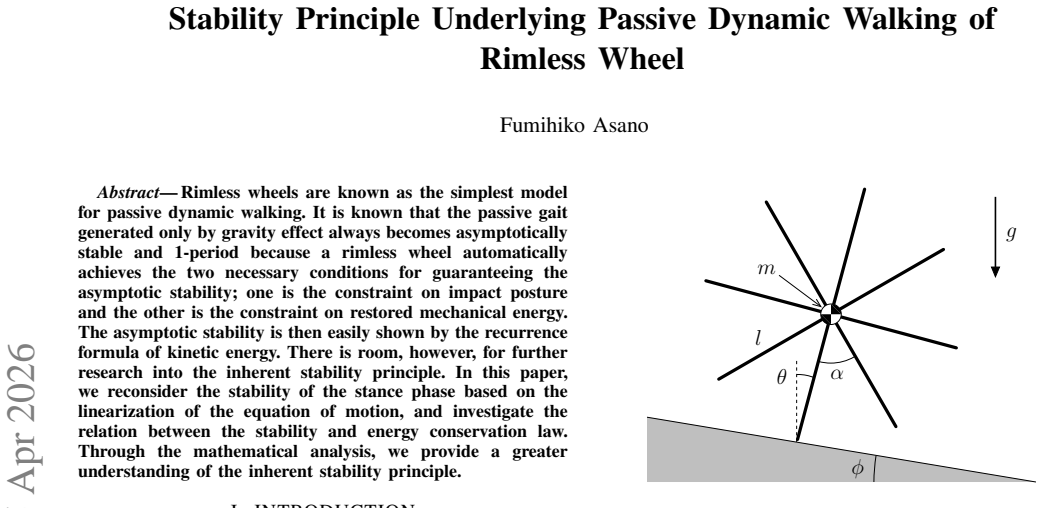
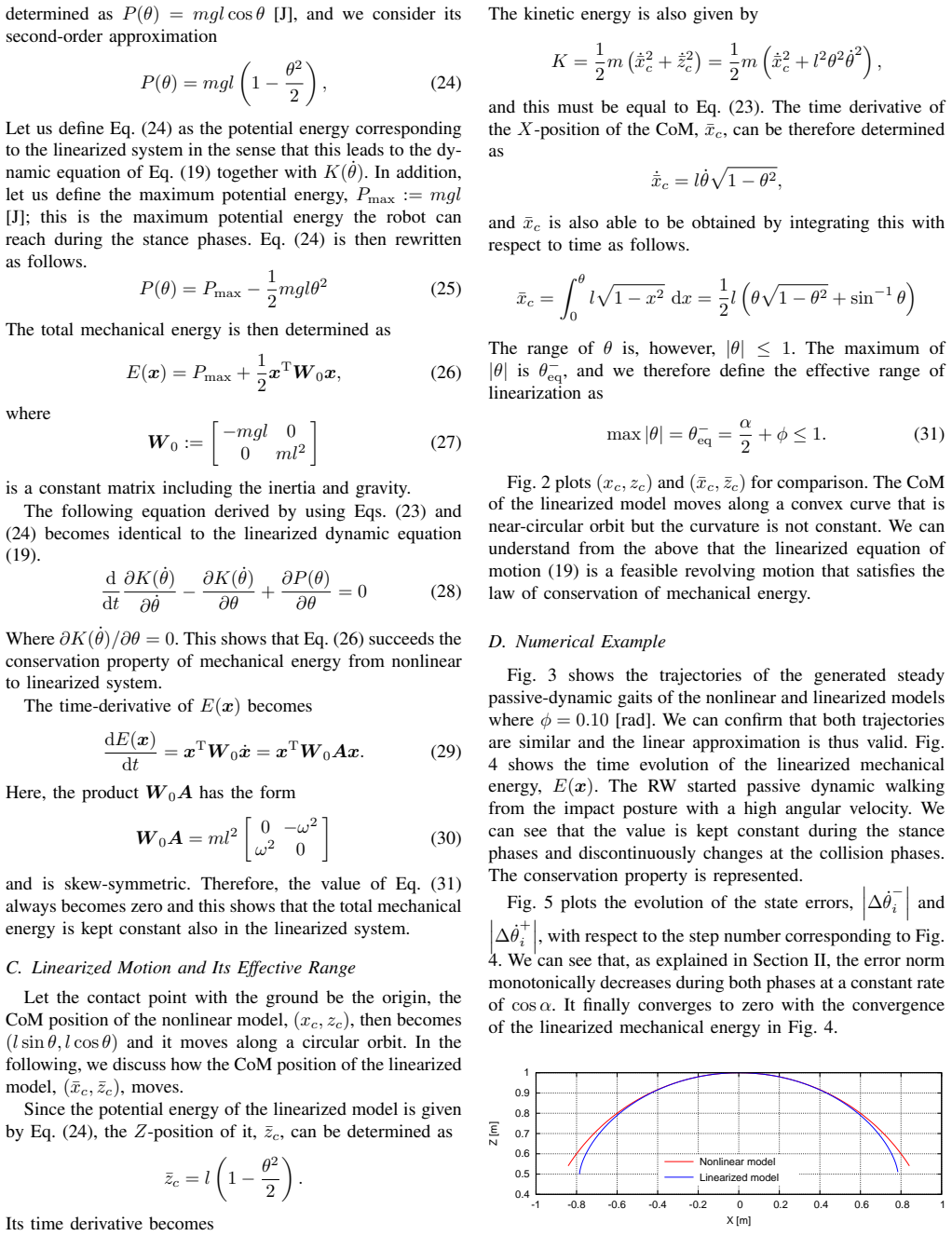
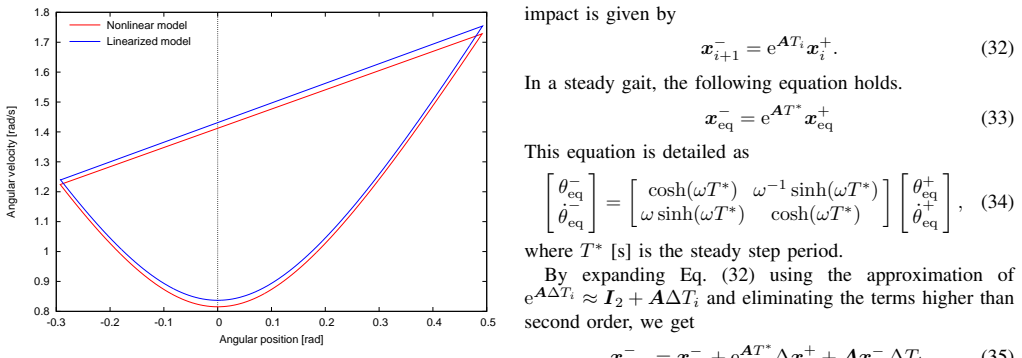
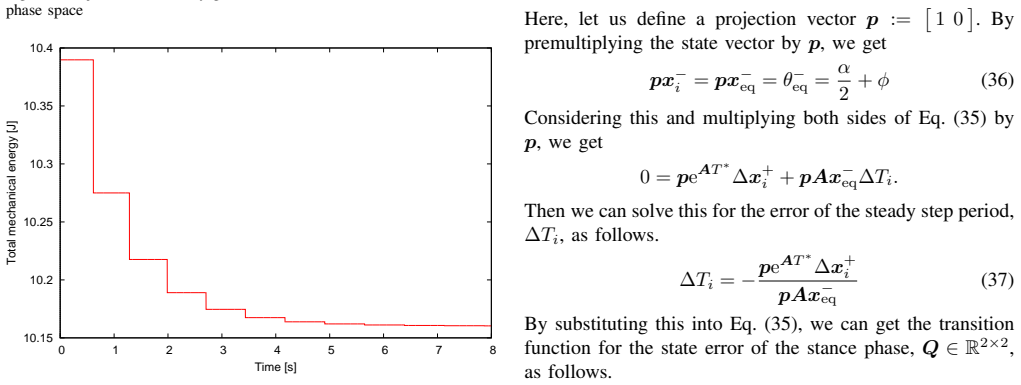
Rimless wheels are known as the simplest model for passive dynamic walking. It is known that the passive gait generated only by gravity effect always becomes asymptotically stable and 1-period because a rimless wheel automatically achieves the two necessary conditions for guaranteeing the asymptotic stability; one is the constraint on impact posture and the other is the constraint on restored mechanical energy. The asymptotic stability is then easily shown by the recurrence formula of kinetic energy. There is room, however, for further research into the inherent stability principle. In this paper, we reconsider the stability of the stance phase based on the linearization of the equation of motion, and investigate the relation between the stability and energy conservation law. Through the mathematical analysis, we provide a greater understanding of the inherent stability principle.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that passive dynamic walking of a rimless wheel is always asymptotically stable and 1-periodic solely due to gravity, because the model automatically satisfies two conditions: a constraint on impact posture and a constraint on restored mechanical energy. Asymptotic stability then follows directly from a recurrence formula for kinetic energy. The authors re-analyze stance-phase stability by linearizing the nonlinear equations of motion around the nominal trajectory and examine the connection between this linear stability and the energy conservation law to clarify the underlying principle.
Significance. If the derivations hold, the work supplies a clearer mathematical account of why the rimless wheel exhibits parameter-free passive stability, reinforcing its role as the simplest model for passive dynamic walking. The explicit linkage between linearized stance dynamics and energy restoration at impact is a useful conceptual contribution that could guide stability analysis of more complex passive or semi-passive legged systems.
major comments (2)
- [Abstract and stance-phase linearization section] The linearization of the stance-phase EOM around the nominal trajectory (described in the abstract and developed in the stability analysis section) yields a local stability certificate via the discrete Poincaré map or continuous-time eigenvalues. However, the central claim of global asymptotic stability for arbitrary initial conditions is not automatically guaranteed by this local result; the kinetic-energy recurrence and impact-posture constraint must be shown to preclude other attractors, multi-periodic orbits, or divergence in the full nonlinear system.
- [Kinetic energy recurrence and energy analysis] The recurrence formula of kinetic energy is presented as establishing asymptotic stability once the two constraints are satisfied. The manuscript should explicitly derive or bound the contraction factor in this recurrence for the nonlinear case, including any dependence on the linearization approximation, to close the gap between local linear behavior and global convergence.
minor comments (2)
- [Notation and definitions] Clarify the precise definition of the nominal trajectory used for linearization and state any assumptions on the range of initial conditions for which the global claim is asserted.
- [Results or discussion] Add a brief numerical verification (e.g., phase portraits or basin-of-attraction plots) to illustrate that trajectories starting away from the nominal gait converge to the 1-periodic orbit, supporting the analytic claims.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which help us better articulate the global aspects of the stability analysis. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract and stance-phase linearization section] The linearization of the stance-phase EOM around the nominal trajectory (described in the abstract and developed in the stability analysis section) yields a local stability certificate via the discrete Poincaré map or continuous-time eigenvalues. However, the central claim of global asymptotic stability for arbitrary initial conditions is not automatically guaranteed by this local result; the kinetic-energy recurrence and impact-posture constraint must be shown to preclude other attractors, multi-periodic orbits, or divergence in the full nonlinear system.
Authors: The global asymptotic stability is established primarily through the recurrence relation for the kinetic energy at successive impact events, which is derived from the exact nonlinear impact map and the fixed impact posture constraint. This recurrence holds independently of the stance-phase dynamics details, as long as the rimless wheel reaches the next impact without falling, which is guaranteed by the model for initial conditions with sufficient energy. The linearization of the stance phase is performed to demonstrate that the continuous dynamics are consistent with energy conservation and do not destabilize the discrete map. We believe this combination precludes other attractors in the relevant domain, but we will add a clarifying paragraph in the revised manuscript to explicitly connect the global recurrence to the absence of multi-periodic orbits. revision: partial
-
Referee: [Kinetic energy recurrence and energy analysis] The recurrence formula of kinetic energy is presented as establishing asymptotic stability once the two constraints are satisfied. The manuscript should explicitly derive or bound the contraction factor in this recurrence for the nonlinear case, including any dependence on the linearization approximation, to close the gap between local linear behavior and global convergence.
Authors: We agree that making the contraction factor explicit would strengthen the presentation. The recurrence is derived from the nonlinear impact map using the posture and energy constraints, without reliance on the stance-phase linearization. We will revise the manuscript to explicitly derive the contraction factor from the recurrence formula and provide a bound showing it is strictly less than one, thereby closing the gap to global convergence. revision: yes
Circularity Check
No circularity: linearization analysis is independent of prior constraints and recurrence formula
full rationale
The paper states that rimless-wheel passive gaits are known to satisfy impact-posture and energy-restoration constraints, allowing stability to be shown via the kinetic-energy recurrence formula. It then performs a separate linearization of the stance-phase nonlinear EOM around the nominal trajectory to relate stability to the energy conservation law. This linearization step does not redefine the constraints or recurrence in terms of itself, nor does it fit parameters to data and relabel the fit as a prediction. No self-citation chain, ansatz smuggling, or renaming of known results is present in the provided text. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Linearization of the nonlinear equation of motion around the nominal stance-phase trajectory accurately reflects local stability properties.
- domain assumption Mechanical energy is conserved during the stance phase except at discrete impact events.
Reference graph
Works this paper leans on
-
[1]
T. McGeer, “Passive dynamic walking,”Int. J. of Robotics Research, V ol. 9, No. 2, pp. 62–82, 1990
work page 1990
-
[2]
Rimless wheel with radially expanding spokes: dynamics, impact, and stable gait,
J. Yan and S. K. Agrawal, “Rimless wheel with radially expanding spokes: dynamics, impact, and stable gait,”Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 3240–3244, 2004
work page 2004
-
[3]
Limit cycle running of telescopic-legged rimless wheel,
F. Asano and M. Suguro, “Limit cycle running of telescopic-legged rimless wheel,”Proc. of the IEEE Int. Conf. on Robotics and Automa- tion, pp. 1652–1657, 2011
work page 2011
-
[4]
Passive dynamic quadrupedal walking,
A. C. Smith and M. D. Berkemeier, “Passive dynamic quadrupedal walking,”Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 34–39, 1997
work page 1997
-
[5]
R. Inoue, F. Asano, D. Tanaka and Isao Tokuda, “Passive dynamic walking of combined rimless wheel and its speeding-up by adjustment of phase difference,”Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2747–2752, 2011
work page 2011
-
[6]
The motion of a finite-width rimless wheel in 3D,
A. C. Smith and M. D. Berkemeier, “The motion of a finite-width rimless wheel in 3D,”Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 2345–2350, 1998
work page 1998
-
[7]
Design and stability analysis of a 3D rimless wheel with flat feet and ankle springs,
T. Narukawa, M. Takahashi and K. Yoshida, “Design and stability analysis of a 3D rimless wheel with flat feet and ankle springs,”JSME J. of System Design and Dynamics, V ol. 3, No. 3, pp. 258–269, 2009
work page 2009
-
[8]
Rimless wheel with asymmetric flat feet,
J. Jiao, M. Zhao and C. Mu, “Rimless wheel with asymmetric flat feet,”Proc. of the IEEE Int. Conf. on Robotics and Biomimetics, pp. 288–293, 2010
work page 2010
-
[9]
F. Asano and M. Suguro, “High-speed dynamic gait generation based on forward tilting impact posture using telescopic legs and forefeet,” Proc. of the 13th Int. Conf. on Climbing and Walking Robots and the Support Technologies for Mobile Machines (CLAWAR2010), pp. 729–736, 2010
work page 2010
-
[10]
Efficiency and optimality of two-period limit cycle walk- ing,
F. Asano, “Efficiency and optimality of two-period limit cycle walk- ing,”Advanced Robotics, V ol. 26, No. 1-2, pp. 155–176, 2012
work page 2012
-
[11]
Asymptotically stable biped gait generation based on stability principle of rimless wheel,
F. Asano and Z.W. Luo, “Asymptotically stable biped gait generation based on stability principle of rimless wheel,”Robotica, V ol. 27, Issue 6, pp. 949–958, 2009
work page 2009
-
[12]
Swing-leg retrac- tion helps biped walking stability,
M. Wisse, C. G. Atkeson and D. K. Kloimwieder, “Swing-leg retrac- tion helps biped walking stability,”Proc. of the IEEE-RAS Int. Conf. on Humanoid Robots, pp. 295–300, 2005
work page 2005
-
[13]
Self-stabilization principle of mechanical energy inherent in passive compass gait,
F. Asano, “Self-stabilization principle of mechanical energy inherent in passive compass gait,”Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2249–2254, 2011
work page 2011
-
[14]
Stability analysis of passive compass gait using linearized model,
F. Asano, “Stability analysis of passive compass gait using linearized model,”Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 557–562, 2011
work page 2011
-
[15]
Stability analysis of underactuated bipedal gait using linearized model,
F. Asano, “Stability analysis of underactuated bipedal gait using linearized model,”Proc. of the 11th IEEE-RAS Int. Conf. on Humanoid Robots, pp. 282–287, 2011
work page 2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.