Recognition: unknown
Seabird trajectories map onto a reduced optimal-control bound for dynamic soaring
Pith reviewed 2026-05-10 11:29 UTC · model grok-4.3
The pith
Seabird trajectories approach a reduced lower bound on transport effort derived from a simplified optimal-control model of dynamic soaring.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
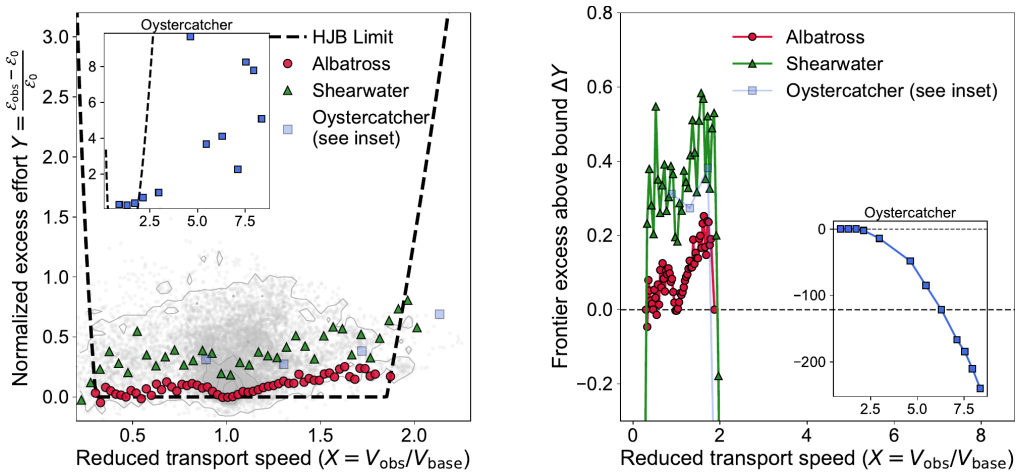
A reduced Hamilton-Jacobi-Bellman model that retains only induced-drag, dissipative, and wind-shear terms produces an explicit lower bound on transport effort as a function of normalized speed. When field trajectories are scaled by species-specific factors and plotted in the resulting speed-effort plane, the frontier extracted from wandering albatross data lies nearest the bound, indicating near-optimal harvesting of vertical wind shear; Cory's shearwater trajectories are displaced upward and oystercatchers fall into a distinct regime without shear exploitation.
What carries the argument
the reduced lower bound on transport effort obtained from the simplified Hamilton-Jacobi-Bellman optimal-control model that trades induced-drag penalties against dissipative penalties and wind-shear subsidy
If this is right
- Albatrosses extract mechanical energy from wind shear near the minimum possible under the model's assumptions.
- Shearwaters incur a measurable extra effort cost relative to the same bound, consistent with mixed flap-gliding.
- Oystercatchers operate in a mechanically separate regime that does not rely on vertical shear.
- The same normalized plane supplies a common reference for comparing any wind-assisted flight strategy across species or engineered vehicles.
- Empirical frontiers can be tracked over time to detect shifts in realized performance.
Where Pith is reading between the lines
- The normalization procedure could be applied to other soaring or gliding animals to test whether their performance also clusters near the bound.
- Engineers designing autonomous gliders might use the same reduced bound as a design target for wind-energy harvesting.
- If wind-shear statistics change with climate, the distance of real trajectories from the bound could quantify energetic stress on populations.
Load-bearing premise
The three retained terms in the simplified model dominate the energetic budget so that trajectories can be compared to the bound without missing larger unmodeled costs.
What would settle it
New high-resolution trajectories for wandering albatrosses, after identical species normalization, that lie systematically and substantially above the predicted bound would show the bound is not tight enough to be useful.
Figures

read the original abstract
Dynamic soaring allows seabirds to harvest mechanical energy from vertical wind shear, but field trajectories lack a benchmark for comparing flight performances across species. We derive a reduced lower bound on transport effort from a simplified Hamilton-Jacobi-Bellman optimal-control model in which slow flight incurs an induced-drag penalty, fast flight incurs a dissipative penalty, and wind shear supplies an effective energetic subsidy. After species-specific normalization of transport speed and an accelerometer-based effort proxy, we map wandering albatrosses, Cory's shearwaters, and Eurasian oystercatchers into a common reduced speed-effort plane and estimate their empirical lower frontiers. The albatross frontier lies closest to the reduced bound, consistent with near-optimal wind-energy harvesting. The shearwater frontier is systematically displaced above it, and oystercatchers occupy a distinct non-soaring regime. The resulting framework places specialist dynamic soaring, mixed flap-gliding, and non-soaring flight in a common mechanical representation and provides a reduced benchmark for comparing wind-assisted flight across species using field trajectories.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper derives a reduced lower bound on transport effort from a simplified Hamilton-Jacobi-Bellman optimal-control model with induced-drag penalty at low speed, dissipative penalty at high speed, and wind-shear subsidy. After species-specific normalization of transport speed and an accelerometer-based effort proxy, trajectories of wandering albatrosses, Cory's shearwaters, and Eurasian oystercatchers are mapped into a common speed-effort plane; the albatross empirical frontier lies closest to the bound, interpreted as near-optimal wind-energy harvesting, while shearwaters are displaced above and oystercatchers occupy a non-soaring regime.
Significance. If the simplified three-term model is energetically complete in the observed regimes and the accelerometer proxy faithfully represents the model's effort, the framework supplies a compact, cross-species benchmark for assessing dynamic-soaring performance from field trajectories. It usefully combines optimal-control reduction with empirical frontier estimation and places specialist soaring, mixed flap-gliding, and non-soaring flight on a common mechanical scale.
major comments (3)
- [§2] §2 (HJB reduction): the claim that the derived bound is a meaningful lower limit that real trajectories cannot sustainably lie below rests on the assumption that induced-drag, dissipation, and wind-shear terms dominate; the manuscript provides no quantitative bound on omitted speed-dependent costs (e.g., profile drag ~v^3) within the normalized speed range, which directly affects whether proximity can be read as near-optimality.
- [§4] §4 (empirical frontiers and Figure 3): no error bars, bootstrap intervals, or sensitivity checks to data exclusions are reported for the estimated lower frontiers; without these, it is impossible to determine whether the albatross frontier is statistically distinguishable from the shearwater frontier after species-specific normalization.
- [§3.2] §3.2 (accelerometer proxy and normalization): the effort proxy is accelerometer-derived and normalization constants are species-specific; the manuscript does not validate that this proxy matches the model's effort definition, raising the possibility that the observed proximity is partly an artifact of the fitting procedure rather than an independent test of optimality.
minor comments (3)
- [§2] Notation for the reduced speed-effort variables is introduced without an explicit table relating them to the original HJB states and controls.
- [Abstract] The abstract states that the albatross frontier 'lies closest' but does not quantify the displacement (e.g., vertical offset or integrated area) relative to the bound.
- [Figures] Figure captions should state the number of trajectories and total flight time per species to allow readers to gauge sampling density.
Simulated Author's Rebuttal
We are grateful to the referee for their constructive feedback on our manuscript. We have carefully considered each of the major comments and provide point-by-point responses below, indicating where revisions will be made to the manuscript.
read point-by-point responses
-
Referee: [§2] §2 (HJB reduction): the claim that the derived bound is a meaningful lower limit that real trajectories cannot sustainably lie below rests on the assumption that induced-drag, dissipation, and wind-shear terms dominate; the manuscript provides no quantitative bound on omitted speed-dependent costs (e.g., profile drag ~v^3) within the normalized speed range, which directly affects whether proximity can be read as near-optimality.
Authors: We agree that a quantitative assessment of omitted terms such as profile drag would strengthen the interpretation of the bound as a lower limit. In the revised version, we will add an appendix estimating the magnitude of profile drag and other speed-dependent costs using typical values from seabird aerodynamics literature (e.g., profile drag coefficients), normalized to the observed speed range. This will provide bounds on the error introduced by the simplification and clarify the regimes where the three-term model is appropriate. revision: yes
-
Referee: [§4] §4 (empirical frontiers and Figure 3): no error bars, bootstrap intervals, or sensitivity checks to data exclusions are reported for the estimated lower frontiers; without these, it is impossible to determine whether the albatross frontier is statistically distinguishable from the shearwater frontier after species-specific normalization.
Authors: The referee is correct that the current manuscript lacks uncertainty quantification for the empirical frontiers. We will revise the analysis to include bootstrap resampling for confidence intervals on the frontier estimates and sensitivity tests excluding subsets of the data (e.g., by individual or by wind conditions). These will be added to Figure 3 and the text, enabling a statistical comparison between species. revision: yes
-
Referee: [§3.2] §3.2 (accelerometer proxy and normalization): the effort proxy is accelerometer-derived and normalization constants are species-specific; the manuscript does not validate that this proxy matches the model's effort definition, raising the possibility that the observed proximity is partly an artifact of the fitting procedure rather than an independent test of optimality.
Authors: We acknowledge that direct validation of the accelerometer proxy against the model's effort variable is not provided, as this would require synchronized wind-tunnel or controlled measurements not available in the field data. However, the proxy is derived from established methods in the literature for estimating mechanical power from acceleration. In revision, we will expand §3.2 to include a more detailed justification of the proxy, citing supporting studies, and perform a sensitivity analysis to the choice of normalization constants to demonstrate that the relative positioning of frontiers is robust. This addresses the concern that the result may be an artifact. revision: partial
Circularity Check
No significant circularity in the derivation or comparison chain.
full rationale
The reduced lower bound is obtained by simplifying the Hamilton-Jacobi-Bellman optimal-control problem to three explicit terms (induced-drag penalty at low speed, dissipative penalty at high speed, wind-shear subsidy). This analytic bound is constructed from the model equations before any seabird data are introduced. Species-specific normalization of transport speed and the accelerometer-based effort proxy is then applied to the independent field trajectories solely to place the empirical points into the same reduced plane; the lower frontiers are subsequently read off from the normalized data clouds. No equation in the provided text equates the bound to a fit of the same data, renames a data-derived pattern, or relies on a self-citation whose content is itself unverified. The derivation therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- species-specific normalization constants for speed and effort
axioms (1)
- domain assumption The simplified HJB optimal-control model with induced-drag penalty, dissipative penalty, and wind-shear subsidy captures the dominant energetic trade-offs of dynamic soaring.
Reference graph
Works this paper leans on
-
[1]
Colin J Pennycuick.Modelling the flying bird. Vol. 5. Elsevier, 2008
2008
-
[2]
Aerodynamics of gliding flight in a Harris’ hawk, Parabuteo unicinctus
Vance A Tucker and Carlton Heine. “Aerodynamics of gliding flight in a Harris’ hawk, Parabuteo unicinctus”. In:Journal of Experimental Biology149.1 (1990), pp. 469–489
1990
-
[3]
Gliding flight in a jackdaw: a wind tunnel study
Mikael Ros´ en and Anders Hedenstr¨ om. “Gliding flight in a jackdaw: a wind tunnel study”. In:Journal of Experimental Biology204.6 (2001), pp. 1153–1166. 10
2001
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.