Recognition: unknown
DigiForest: Digital Analytics and Robotics for Sustainable Forestry
Pith reviewed 2026-05-10 11:26 UTC · model grok-4.3
The pith
DigiForest combines autonomous robots, automated inventories, growth forecasting, and selective harvesters for precision forestry.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
DigiForest is a novel, large-scale precision forestry approach leveraging digital technologies and autonomous robotics. It is structured around four main components: autonomous, heterogeneous mobile robots (aerial, legged, and marsupial) for tree-level data collection; automated extraction of tree traits to build forest inventories; a Decision Support System for forecasting forest growth and supporting decision-making; and low-impact selective logging using purpose-built autonomous harvesters. These technologies have been extensively validated in real-world conditions in several locations, including forests in Finland, the UK, and Switzerland.
What carries the argument
The four-component integrated system of DigiForest that links robot-based data collection, automated trait extraction for inventories, a decision support system for growth forecasting, and autonomous selective harvesters.
If this is right
- Heterogeneous robots can gather tree-level data at large scale without heavy human presence on the ground.
- Automated trait extraction produces consistent forest inventories from robot-collected measurements.
- The decision support system supplies growth forecasts that inform management choices aligned with long-term goals.
- Purpose-built autonomous harvesters enable selective logging that reduces ecosystem disturbance compared with conventional methods.
- The overall approach supports EU targets for climate neutrality and biodiversity by shifting forestry toward precise, data-driven operations.
Where Pith is reading between the lines
- If the components prove reliable at scale, similar robot-plus-analytics setups could be adapted for forestry in other continents.
- The marsupial robot configuration used for data collection might suggest hybrid mobility designs for other terrain-challenging environments.
- Widespread use could shift forestry labor toward system oversight and data interpretation rather than manual fieldwork.
- Ongoing data from the decision support system could help test how different management choices affect forest resilience under changing climate conditions.
Load-bearing premise
The four components integrate into a single scalable and reliable system whose results from limited European test sites generalize to broader sustainable forestry applications.
What would settle it
A complete end-to-end trial of the integrated DigiForest system in a new forest site that checks whether the combined data accuracy, growth forecasts, and logging outcomes match the sustainability standards observed in the original validation locations.
Figures























read the original abstract
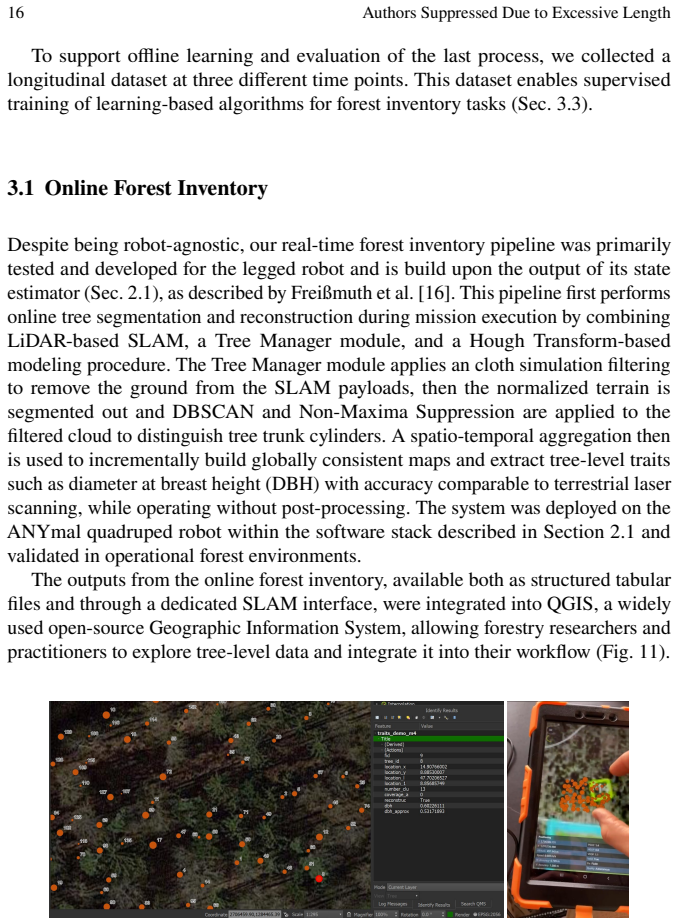
Covering one third of Earth's land surface, forests are vital to global biodiversity, climate regulation, and human well-being. In Europe, forests and woodlands reach approximately 40% of land area, and the forestry sector is central to achieving the EU's climate neutrality and biodiversity goals; these emphasize sustainable forest management, increased use of long-lived wood products, and resilient forest ecosystems. To meet these goals and properly address their inherent challenges, current practices require further innovation. This chapter introduces DigiForest, a novel, large-scale precision forestry approach leveraging digital technologies and autonomous robotics. DigiForest is structured around four main components: (1) autonomous, heterogeneous mobile robots (aerial, legged, and marsupial) for tree-level data collection; (2) automated extraction of tree traits to build forest inventories; (3) a Decision Support System (DSS) for forecasting forest growth and supporting decision-making; and (4) low-impact selective logging using purpose-built autonomous harvesters. These technologies have been extensively validated in real-world conditions in several locations, including forests in Finland, the UK, and Switzerland.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces DigiForest as a novel large-scale precision forestry system that combines four components: (1) heterogeneous autonomous robots (aerial, legged, marsupial) for tree-level data collection, (2) automated extraction of tree traits to generate forest inventories, (3) a Decision Support System (DSS) for forecasting growth and aiding decisions, and (4) purpose-built autonomous harvesters for low-impact selective logging. It states that these technologies have been extensively validated in real-world forest conditions across sites in Finland, the UK, and Switzerland to advance EU climate neutrality and biodiversity objectives.
Significance. If the validations are demonstrated with quantitative evidence, the work could meaningfully advance sustainable forestry by showing how integrated robotics and digital analytics enable precise, low-impact management at scale, directly supporting policy goals for resilient ecosystems and wood-product use. The multi-robot and DSS integration offers a concrete architecture that other precision-agriculture efforts could adapt.
major comments (2)
- [Abstract] Abstract: the central claim that the four components 'have been extensively validated in real-world conditions' is unsupported by any performance metrics, success rates, error analyses, or methodological details. Without these, the assertions of reliability, scalability, and generalization to EU goals cannot be evaluated.
- [Main text] Main text (components 1-4 descriptions): no quantitative results are supplied for robot navigation in dense canopy, trait-extraction accuracy, DSS forecast error, or harvester impact/efficiency, even though these are required to substantiate the 'extensive validation' and integration claims.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. We agree that the current version does not provide sufficient quantitative evidence to fully substantiate the claims of extensive real-world validation, and we will revise the paper to include key performance metrics, error analyses, and references to supporting studies while preserving its role as a high-level system overview.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the four components 'have been extensively validated in real-world conditions' is unsupported by any performance metrics, success rates, error analyses, or methodological details. Without these, the assertions of reliability, scalability, and generalization to EU goals cannot be evaluated.
Authors: We agree that the abstract's phrasing requires stronger substantiation. This manuscript is intended as an integrative overview of the DigiForest architecture rather than a detailed empirical study. The real-world validations across Finland, the UK, and Switzerland have produced quantitative results (navigation success rates, trait-extraction accuracies, DSS forecast errors, and harvester impact metrics), but these appear in companion technical papers. We will revise the abstract to state that the components 'have been validated through real-world deployments' and add a concise summary of representative metrics with citations to the detailed studies. revision: yes
-
Referee: [Main text] Main text (components 1-4 descriptions): no quantitative results are supplied for robot navigation in dense canopy, trait-extraction accuracy, DSS forecast error, or harvester impact/efficiency, even though these are required to substantiate the 'extensive validation' and integration claims.
Authors: We acknowledge that the main-text descriptions of the four components focus on system design and integration without embedding the supporting quantitative data. To address this, we will add a dedicated validation subsection (or expanded paragraphs within each component section) that reports key metrics from the field campaigns, including robot navigation performance in dense canopy, automated trait-extraction accuracy and error rates, DSS growth-forecast errors, and harvester efficiency/impact measures. These additions will be accompanied by references to the underlying studies and will directly support the integration and scalability claims. revision: yes
Circularity Check
No circularity: descriptive project overview with no derivations or self-referential predictions
full rationale
The manuscript is a high-level description of the DigiForest project and its four components (heterogeneous robots, trait extraction, DSS, autonomous harvesters) plus real-world validation sites. No equations, fitted parameters, predictions, or derivation chains appear in the abstract or the supplied text. Claims rest on external empirical validation rather than any reduction of outputs to the paper's own inputs by construction, self-citation load-bearing, or ansatz smuggling. This is the expected non-circular outcome for an overview paper without mathematical content.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
S´ebastien Bauwens et al. “Forest Inventory with Terrestrial LiDAR: A Compar- ison of Static and Hand-Held Mobile Laser Scanning”. In:Forests7.6 (2016). 127.issn: 1999-4907.doi:10.3390/f7060127
-
[2]
SemanticKITTI: A Dataset for Semantic Scene Understanding of LiDAR Sequences
J. Behley et al. “SemanticKITTI: A Dataset for Semantic Scene Understanding of LiDAR Sequences”. In:Intl. Conf. on Computer Vision (ICCV). 2019
2019
-
[3]
Paul J. Besl and Neil D. McKay. “A Method for Registration of 3-D Shapes”. In:IEEE Trans. Pattern Anal. Mach. Intell.14.2 (1992), pp. 239–256.doi: 10.1109/34.121791
-
[4]
Simon Boche, Sebasti ´an Barbas Laina, and Stefan Leutenegger. “Tightly- Coupled LiDAR-Visual-Inertial SLAM and Large-Scale Volumetric Occupancy Mapping”. In:IEEE Int. Conf. Robot. Autom. (ICRA). 2024, pp. 18027–18033. doi:10.1109/ICRA57147.2024.10610460
-
[5]
A Simplified Forest Model to Study Species Compo- sition Along Climate Gradients
Harald K. M. Bugmann. “A Simplified Forest Model to Study Species Compo- sition Along Climate Gradients”. In:Ecology77.7 (1996), pp. 2055–2074.doi: https://doi.org/10.2307/2265700 . eprint: https://esajournals. onlinelibrary.wiley.com/doi/pdf/10.2307/2265700 .url: https: DigiForest: Digital Analytics and Robotics for Sustainable Forestry 31 / / esajournal...
-
[6]
Extracting individual trees from lidar point clouds using treeseg
Andrew Burt, Mathias Disney, and Kim Calders. “Extracting individual trees from lidar point clouds using treeseg”. In:Methods in Ecology and Evolution 10.3 (2019), pp. 438–445.doi: https : / / doi . org / 10 . 1111 / 2041 - 210X.13121
2019
-
[7]
Zhao, Chenfeng Xu, Chen Tang, Chenran Li, Mingyu Ding, Masayoshi Tomizuka, and Wei Zhan
Benoˆıt Casseau et al. “Markerless Aerial-Terrestrial Co-Registration of Forest Point Clouds using a Deformable Pose Graph”. In:IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). 2024, pp. 39–46.doi: 10.1109/IROS58592.2024. 10802448
-
[8]
Nived Chebrolu and Maurice Fallon.Report defining data format and software API for multi-robot map sharing. Tech. rep. University of Oxford, 2023
2023
-
[9]
4D Spatio-Temporal ConvNets: Minkowski Convolutional Neural Networks
C. Choy, J. Gwak, and S. Savarese. “4D Spatio-Temporal ConvNets: Minkowski Convolutional Neural Networks”. In:IEEE Int. Conf. Computer Vision and Pattern Recognition (CVPR). 2019
2019
-
[10]
2021.url: https://eur- lex.europa.eu/legal- content/ EN/TXT/?uri=CELEX%3A52021DC0572
European Commission.Commission communication: New EU forest strategy for 2030. 2021.url: https://eur- lex.europa.eu/legal- content/ EN/TXT/?uri=CELEX%3A52021DC0572
2030
-
[11]
Steering kinematics for a center-articulated mobile robot
P.I. Corke and P. Ridley. “Steering kinematics for a center-articulated mobile robot”. In:IEEE Transactions on Robotics and Automation17.2 (2001), pp. 215–218.doi:10.1109/70.928568
-
[12]
Lidar Remote Sensing for Forestry
Ralph O. Dubayah and Jason B. Drake. “Lidar Remote Sensing for Forestry”. In:Journal of Forestry98.6 (June 2000), pp. 44–46.issn: 0022-1201.doi: 10.1093/jof/98.6.44
-
[13]
Global aboveground biomass product validation best practices protocol. Version 1.0
L Duncanson et al. “Global aboveground biomass product validation best practices protocol. Version 1.0”. In:Best practice protocol for satellite derived land product validation. Land Product Validation Subgroup (Working Group on Calibration and Validation, Committee on Earth Observation Satellites) (2020)
2020
-
[14]
A density-based algorithm for discovering clusters in large spatial databases with noise
M. Ester et al. “A density-based algorithm for discovering clusters in large spatial databases with noise.” In:Proc. of the Conf. on Knowledge Discovery and Data Mining (KDD). 1996
1996
-
[15]
On-Manifold Preintegration for Real-Time Visual– Inertial Odometry
Christian Forster et al. “On-Manifold Preintegration for Real-Time Visual– Inertial Odometry”. In:IEEE Trans. Robot.33.1 (2017), pp. 1–21.doi: 10.1109/TRO.2016.2597321
-
[16]
Online Tree Reconstruction and Forest Inventory on a Mobile Robotic System
Leonard Freißmuth et al. “Online Tree Reconstruction and Forest Inventory on a Mobile Robotic System”. In:IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). 2024
2024
-
[17]
Trajectory Optimization and Following for a Three Degrees of Freedom Overactuated Floating Platform
Jonas Frey et al. “Locomotion Policy Guided Traversability Learning using Volumetric Representations of Complex Environments”. In:2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2022, pp. 5722–5729.doi:10.1109/IROS47612.2022.9982190
-
[18]
In: 2023 IEEE/RSJ Interna- tionalConferenceonIntelligentRobotsandSystems(IROS).pp.7742–7749(2023)
Lanke Frank Tarimo Fu, Nived Chebrolu, and Maurice Fallon. “Extrinsic Calibration of Camera to LIDAR Using a Differentiable Checkerboard Model”. 32 Authors Suppressed Due to Excessive Length In:IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). 2023, pp. 1825–1831.doi: 10.1109/IROS55552.2023.10341781
-
[19]
Multi-resolution 3D mapping with explicit free space representation for fast and accurate mobile robot motion planning
Nils Funk et al. “Multi-resolution 3D mapping with explicit free space representation for fast and accurate mobile robot motion planning”. In:IEEE Robot. Autom. Lett.6.2 (2021), pp. 3553–3560
2021
-
[20]
Unified temporal and spatial calibration for multi-sensor systems
Paul Furgale, Joern Rehder, and Roland Siegwart. “Unified temporal and spatial calibration for multi-sensor systems”. In:IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). 2013, pp. 1280–1286.doi:10.1109/IROS.2013.6696514
-
[21]
In- formed RRT*: Optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic
Jonathan D Gammell, Siddhartha S Srinivasa, and Timothy D Barfoot. “In- formed RRT*: Optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic”. In:IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). 2014, pp. 2997–3004
2014
-
[22]
G. J. Hamilton.Forest Mensuration Handbook. 1988
1988
-
[23]
Motion Primitives Planning For Center-Articulated Vehicles
Jiangpeng Hu et al. “Motion Primitives Planning For Center-Articulated Vehicles”. In:IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). 2024, pp. 12702– 12709
2024
-
[24]
Force control for active chassis balancing
Marco Hutter et al. “Force control for active chassis balancing”. In:IEEE/ASME Transactions On Mechatronics22.2 (2016), pp. 613–622
2016
-
[25]
Harveri : A Small (Semi-)Autonomous Precision Tree Harvester
Edo Jelavic et al. “Harveri : A Small (Semi-)Autonomous Precision Tree Harvester”. In:ICRA 2022 Workshop in Innovation in Forestry Robotics: Research and Industry Adoption. 2022.url: https://openreview.net/ forum?id=BOdgBn6OQM5
2022
-
[26]
iSAM2: Incremental smoothing and mapping using the Bayes tree
Michael Kaess et al. “iSAM2: Incremental smoothing and mapping using the Bayes tree”. In:Int. J. Robot. Res.31.2 (2012), pp. 216–235.doi: 10.1177/ 0278364911430419
2012
-
[27]
Panoptic Segmentation
A. Kirillov et al. “Panoptic Segmentation”. In:IEEE Int. Conf. Computer Vision and Pattern Recognition (CVPR). 2019
2019
-
[28]
OKVIS2: Realtime scalable visual-inertial SLAM with loop closure,
Stefan Leutenegger. “Okvis2: Realtime scalable visual-inertial slam with loop closure”. In:arXiv preprint arXiv:2202.09199(2022)
-
[29]
DigiForests: A Longitudinal LiDAR Dataset for Forestry Robotics
Meher V.R. Malladi et al. “DigiForests: A Longitudinal LiDAR Dataset for Forestry Robotics”. In:IEEE Int. Conf. Robot. Autom. (ICRA). 2025
2025
-
[30]
Mask-Based Panoptic LiDAR Segmentation for Au- tonomous Driving
R. Marcuzzi et al. “Mask-Based Panoptic LiDAR Segmentation for Au- tonomous Driving”. In:IEEE Robot. Autom. Lett.8.2 (2023), pp. 1141–1148
2023
-
[31]
An Efficient Locally Reactive Controller for Safe Navigation in Visual Teach and Repeat Missions
Mat´ıas Mattamala, Nived Chebrolu, and Maurice F. Fallon. “An Efficient Locally Reactive Controller for Safe Navigation in Visual Teach and Repeat Missions”. In:IEEE Robot. Autom. Lett.7.2 (2022), pp. 2353–2360.doi: 10.1109/LRA.2022.3143196
-
[32]
Building Forest Inventories With Autonomous Legged Robots—System, Lessons, and Challenges Ahead
Mat´ıas Mattamala et al. “Building Forest Inventories With Autonomous Legged Robots—System, Lessons, and Challenges Ahead”. In:IEEE Transactions on Field Robotics2 (2025), pp. 418–436.doi:10.1109/TFR.2025.3583972
-
[33]
Simultaneous Localization and Mapping for Forest Harvesters
Mikko Miettinen et al. “Simultaneous Localization and Mapping for Forest Harvesters”. In:Proceedings 2007 IEEE International Conference on Robotics and Automation. 2007, pp. 517–522.doi:10.1109/ROBOT.2007.363838. DigiForest: Digital Analytics and Robotics for Sustainable Forestry 33
-
[34]
Trajectory Optimization and Following for a Three Degrees of Freedom Overactuated Floating Platform
Takahiro Miki et al. “Elevation Mapping for Locomotion and Navigation using GPU”. In:IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). 2022, pp. 2273– 2280.doi:10.1109/IROS47612.2022.9981507
-
[35]
Takahiro Miki et al. “Learning Robust Perceptive Locomotion for Quadrupedal Robots in the Wild”. In:Sci. Robot.7.62 (2022).doi: 10.1126/scirobotics. abk2822
-
[36]
Learning adaptive controller for hydraulic machinery automation
Fang Nan and Marco Hutter. “Learning adaptive controller for hydraulic machinery automation”. In:IEEE Robot. Autom. Lett.(2024)
2024
-
[37]
Zhao, Chenfeng Xu, Chen Tang, Chenran Li, Mingyu Ding, Masayoshi Tomizuka, and Wei Zhan
Haedam Oh et al. “Evaluation and Deployment of LiDAR-based Place Recog- nition in Dense Forests”. In:IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). 2024, pp. 12824–12831.doi:10.1109/IROS58592.2024.10801297
-
[38]
Sotiris Papatheodorou et al. “Efficient Submap-based Autonomous MA V Exploration using Visual-Inertial SLAM Configurable for LiDARs or Depth Cameras”. In:arXiv preprint arXiv:2409.16972(2024)
-
[39]
Significant increase in natural disturbance impacts on European forests since 1950
Marco Patacca et al. “Significant increase in natural disturbance impacts on European forests since 1950”. In:Global Change Biology29.5 (2023), pp. 1359–1376.doi:https://doi.org/10.1111/gcb.16531
-
[40]
The Resilient Micro Flyer: a New Collision-tolerant Au- tonomous Robot
Paolo De Petris. “The Resilient Micro Flyer: a New Collision-tolerant Au- tonomous Robot”. MA thesis. University of Nevada, Reno, 2020
2020
-
[41]
Mapping forests using an unmanned ground vehicle with 3D LiDAR and graph-SLAM
Marek Pierzcha la, Philippe Gigu`ere, and Rasmus Astrup. “Mapping forests using an unmanned ground vehicle with 3D LiDAR and graph-SLAM”. In: Computers and Electronics in Agriculture145 (2018), pp. 217–225.issn: 0168-1699.doi:https://doi.org/10.1016/j.compag.2017.12.034
-
[42]
Seamless Scene Segmentation
L. Porzi et al. “Seamless Scene Segmentation”. In:IEEE Int. Conf. Computer Vision and Pattern Recognition (CVPR). 2019
2019
-
[43]
Milad Ramezani et al. “Online LiDAR-SLAM for Legged Robots with Robust Registration and Deep-Learned Loop Closure”. In:IEEE Int. Conf. Robot. Autom. (ICRA). 2020, pp. 4158–4164.doi: 10.1109/ICRA40945.2020. 9196769
-
[44]
U-Net: Convolutional Networks for Biomedical Image Segmentation
O. Ronneberger, P.Fischer, and T. Brox. “U-Net: Convolutional Networks for Biomedical Image Segmentation”. In:Proc. of the Medical Image Computing and Computer-Assisted Intervention (MICCAI). 2015.url: https://arxiv. org/pdf/1505.04597.pdf
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[45]
Automatic three-dimensional mapping for tree diameter measurements in inventory operations
Jean-Franc ¸ois Tremblay et al. “Automatic three-dimensional mapping for tree diameter measurements in inventory operations”. In:Journal of Field Robotics 37.8 (2020), pp. 1328–1346.doi: https://doi.org/10.1002/rob.21980
-
[46]
NeRF-Supervision: Learning Dense Object Descriptors from Neural Radiance Fields , booktitle =
Kavisha Vidanapathirana et al. “LoGG3D-Net: Locally Guided Global De- scriptor Learning for 3D Place Recognition”. In:IEEE Int. Conf. Robot. Autom. (ICRA). 2022, pp. 2215–2221.doi:10.1109/ICRA46639.2022.9811753
-
[47]
VILENS: Visual, Inertial, Lidar, and Leg Odometry for All-Terrain Legged Robots
David Wisth, Marco Camurri, and Maurice Fallon. “VILENS: Visual, Inertial, Lidar, and Leg Odometry for All-Terrain Legged Robots”. In:IEEE Trans. Robot.39.1 (2023), pp. 309–326.doi:10.1109/TRO.2022.3193788
-
[48]
Unifying flow, stereo and depth estimation
Haofei Xu et al. “Unifying flow, stereo and depth estimation”. In:IEEE Trans. Pattern Anal. Mach. Intell.45.11 (2023), pp. 13941–13958. 34 Authors Suppressed Due to Excessive Length
2023
- [49]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.