Recognition: unknown
One-Shot Cross-Geometry Skill Transfer through Part Decomposition
Pith reviewed 2026-05-10 10:26 UTC · model grok-4.3
The pith
Decomposing objects into semantic parts lets robots transfer skills to unfamiliar shapes from one demonstration.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
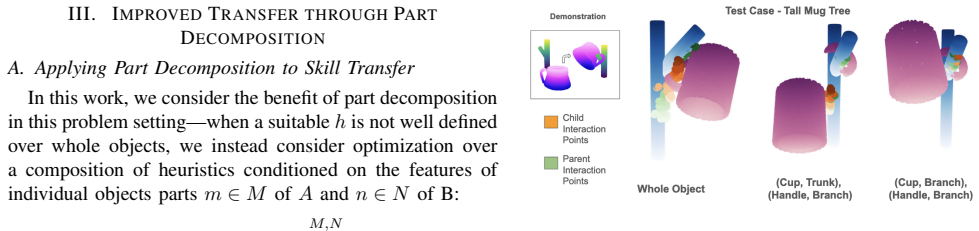
Core claim
The central claim is that object decomposition into semantic parts combined with data-efficient generative shape models allows interaction points from a single demonstration to be transferred and aligned on novel geometries, producing successful one-shot skill transfer that works across a wider range of object shapes than prior methods, in both simulated and physical environments.
What carries the argument
Semantic part decomposition paired with generative shape models that map interaction points, followed by autonomous construction of an alignment objective on skill-relevant parts.
If this is right
- One demonstration suffices for multiple skills and objects of varying shapes.
- Transfer succeeds without shape-specific retraining or additional data collection.
- The approach applies in both simulation and on physical robots.
- Alignment optimization on the transferred points produces executable trajectories for the new geometry.
Where Pith is reading between the lines
- If part labels remain stable across object categories, the same decomposition could support chaining multiple skills on composite objects.
- The method might reduce the data needed for continual learning by reusing part-level mappings rather than whole-object policies.
- Integration with online perception could let robots discover new parts during deployment without retraining the generative models.
Load-bearing premise
Objects can be broken into the same semantic parts across widely different overall shapes and the generative models can move interaction points accurately without further demonstrations or manual adjustment.
What would settle it
An experiment in which objects with the same functional parts but inconsistent geometry labels cause the transferred points to produce grasp or motion failures even after optimization.
Figures





read the original abstract
Given a demonstration, a robot should be able to generalize a skill to any object it encounters-but existing approaches to skill transfer often fail to adapt to objects with unfamiliar shapes. Motivated by examples of improved transfer from compositional modeling, we propose a method for improving transfer by decomposing objects into their constituent semantic parts. We leverage data-efficient generative shape models to accurately transfer interaction points from the parts of a demonstration object to a novel object. We autonomously construct an objective to optimize the alignment of those points on skill-relevant object parts. Our method generalizes to a wider range of object geometries than existing work, and achieves successful one-shot transfer for a range of skills and objects from a single demonstration, in both simulated and real environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a method for one-shot cross-geometry skill transfer by decomposing objects into semantic parts, leveraging data-efficient generative shape models to transfer interaction points from a single demonstration, and autonomously optimizing an alignment objective on skill-relevant parts. It claims improved generalization over prior work to a wider range of object geometries, with successful transfer demonstrated for multiple skills and objects in both simulation and real-robot settings.
Significance. If the central claims hold, the work would meaningfully advance data-efficient robot learning by reducing reliance on multiple demonstrations or per-object tuning when transferring manipulation skills to novel shapes. The emphasis on compositional part decomposition and generative models for point transfer is a clear strength, as is the one-shot framing combined with both simulated and physical validation.
minor comments (2)
- [Abstract] Abstract: the phrase 'a range of skills and objects' is repeated without concrete examples or enumeration; adding one or two specific instances (e.g., 'pouring into mugs of varying handle curvature') would immediately clarify the scope of the generalization claim.
- [Abstract] Abstract: the assertion that the method 'generalizes to a wider range of object geometries than existing work' would be stronger if it briefly named the closest baselines or cited the quantitative metric (e.g., success rate delta) used to support the comparison.
Simulated Author's Rebuttal
We thank the referee for their positive summary of our work and for recommending minor revision. We are encouraged that the significance of using part decomposition with generative shape models for one-shot cross-geometry skill transfer is recognized, along with the value of our simulated and real-robot validation.
Circularity Check
No significant circularity; derivation chain is self-contained
full rationale
The abstract and available description present a high-level method proposal for part-based skill transfer without any equations, derivations, fitted parameters renamed as predictions, or load-bearing self-citations. No self-definitional steps, uniqueness theorems, or ansatzes are visible that reduce outputs to inputs by construction. Claims rest on the empirical performance of the proposed decomposition and transfer procedure rather than tautological reductions, consistent with the reader's assessment of low circularity risk.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Objects have consistent semantic parts that can be identified and aligned across different geometries
Reference graph
Works this paper leans on
-
[1]
Neural descriptor fields: Se(3)- equivariant object representations for manipulation,
A. Simeonov, Y . Du, A. Tagliasacchi, J. B. Tenenbaum, A. Rodriguez, P. Agrawal, and V . Sitzmann, “Neural descriptor fields: Se(3)- equivariant object representations for manipulation,”CoRR, vol. abs/2112.05124, 2021. [Online]. Available: https://arxiv.org/abs/2112. 05124
-
[2]
One- shot imitation learning via interaction warping,
O. Biza, S. Thompson, K. R. Pagidi, A. Kumar, E. van der Pol, R. Walters, T. Kipf, J. van de Meent, L. L. S. Wong, and R. Platt, “One- shot imitation learning via interaction warping,” inConference on Robot Learning, CoRL 2023, 6-9 November 2023, Atlanta, GA, USA, ser. Proceedings of Machine Learning Research, J. Tan, M. Toussaint, and K. Darvish, Eds., v...
2023
-
[3]
Composable part-based manipulation,
W. Liu, J. Mao, J. Hsu, T. Hermans, A. Garg, and J. Wu, “Composable part-based manipulation,” 2024. [Online]. Available: https://arxiv.org/abs/2405.05876
-
[4]
Local neural descriptor fields: Locally conditioned object representations for manipulation,
E. Chun, Y . Du, A. Simeonov, T. Lozano-Perez, and L. Kaelbling, “Local neural descriptor fields: Locally conditioned object representations for manipulation,” 2023. [Online]. Available: https://arxiv.org/abs/2302.03573
-
[6]
Available: http://arxiv.org/abs/1812.02713
[Online]. Available: http://arxiv.org/abs/1812.02713
-
[7]
J. Qian, Y . Li, B. Bucher, and D. Jayaraman, “Task-oriented hierarchical object decomposition for visuomotor control,” 2024. [Online]. Available: https://arxiv.org/abs/2411.01284
-
[8]
A. Kirillov, E. Mintun, N. Ravi, H. Mao, C. Rolland, L. Gustafson, T. Xiao, S. Whitehead, A. C. Berg, W.-Y . Lo, P. Doll ´ar, and R. Girshick, “Segment anything,” 2023. [Online]. Available: https://arxiv.org/abs/2304.02643
work page internal anchor Pith review arXiv 2023
-
[9]
ShapeNet: An Information-Rich 3D Model Repository
A. X. Chang, T. A. Funkhouser, L. J. Guibas, P. Hanrahan, Q. Huang, Z. Li, S. Savarese, M. Savva, S. Song, H. Su, J. Xiao, L. Yi, and F. Yu, “Shapenet: An information-rich 3d model repository,”CoRR, vol. abs/1512.03012, 2015. [Online]. Available: http://arxiv.org/abs/1512.03012
work page internal anchor Pith review arXiv 2015
-
[10]
kpam: Keypoint affordances for category-level robotic manipulation, 2019
L. Manuelli, W. Gao, P. R. Florence, and R. Tedrake, “kpam: Keypoint affordances for category-level robotic manipulation,”CoRR, vol. abs/1903.06684, 2019. [Online]. Available: http://arxiv.org/abs/ 1903.06684
-
[11]
Transferring Category-Based Func- tional Grasping Skills by Latent Space Non-Rigid Registration,
D. Rodriguez and S. Behnke, “Transferring Category-Based Func- tional Grasping Skills by Latent Space Non-Rigid Registration,”IEEE Robotics and Automation Letters, vol. 3, no. 3, pp. 2662–2669, Jul. 2018
2018
-
[12]
J. Schulman, J. Ho, C. Lee, and P. Abbeel,Learning from Demonstrations Through the Use of Non-rigid Registration. Cham: Springer International Publishing, 2016, pp. 339–354. [Online]. Available: https://doi.org/10.1007/978-3-319-28872-7 20
-
[13]
Shape-Based Transfer of Generic Skills,
S. Thompson, L. P. Kaelbling, and T. Lozano-Perez, “Shape-Based Transfer of Generic Skills,” in2021 IEEE International Conference on Robotics and Automation (ICRA), May 2021, pp. 5996–6002
2021
-
[14]
OV-PARTS: Towards open-vocabulary part segmentation,
M. Wei, X. Yue, W. Zhang, S. Kong, X. Liu, and J. Pang, “OV-PARTS: Towards open-vocabulary part segmentation,” inThirty- seventh Conference on Neural Information Processing Systems Datasets and Benchmarks Track, 2023. [Online]. Available: https: //openreview.net/forum?id=EFl8zjjXeX
2023
-
[15]
A method for registration of 3-d shapes,
P. Besl and N. D. McKay, “A method for registration of 3-d shapes,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 14, no. 2, pp. 239–256, 1992
1992
-
[16]
Pybullet, a python module for physics sim- ulation for games, robotics and machine learning,
E. Coumans and Y . Bai, “Pybullet, a python module for physics sim- ulation for games, robotics and machine learning,” http://pybullet.org, 2016–2021
2016
-
[17]
DINOv2: Learning Robust Visual Features without Supervision
M. Oquab, T. Darcet, T. Moutakanni, H. V o, M. Szafraniec, V . Khalidov, P. Fernandez, D. Haziza, F. Massa, A. El-Nouby, M. Assran, N. Ballas, W. Galuba, R. Howes, P.-Y . Huang, S.-W. Li, I. Misra, M. Rabbat, V . Sharma, G. Synnaeve, H. Xu, H. Jegou, J. Mairal, P. Labatut, A. Joulin, and P. Bojanowski, “Dinov2: Learning robust visual features without supe...
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[18]
Y . Zhu, A. Lim, P. Stone, and Y . Zhu, “Vision-based manipulation from single human video with open-world object graphs,” 2024. [Online]. Available: https://arxiv.org/abs/2405.20321
-
[19]
One-shot manipulation strategy learning by making contact analogies,
Y . Liu, J. Mao, J. Tenenbaum, T. Lozano-P ´erez, and L. P. Kaelbling, “One-shot manipulation strategy learning by making contact analogies,” 2024. [Online]. Available: https://arxiv.org/abs/ 2411.09627
-
[20]
Z. Xue, S. Deng, Z. Chen, Y . Wang, Z. Yuan, and H. Xu, “Demogen: Synthetic demonstration generation for data-efficient visuomotor policy learning,” 2025. [Online]. Available: https: //arxiv.org/abs/2502.16932
-
[21]
Two by two: Learning multi-task pairwise objects assembly for generalizable robot manipulation,
Y . Qi, Y . Ju, T. Wei, C. Chu, L. L. S. Wong, and H. Xu, “Two by two: Learning multi-task pairwise objects assembly for generalizable robot manipulation,” 2025. [Online]. Available: https://arxiv.org/abs/2504.06961
-
[22]
Riemann: Near real-time se(3)-equivariant robot manipulation without point cloud segmentation,
C. Gao, Z. Xue, S. Deng, T. Liang, S. Yang, L. Shao, and H. Xu, “Riemann: Near real-time se(3)-equivariant robot manipulation without point cloud segmentation,” 2024. [Online]. Available: https://arxiv.org/abs/2403.19460
-
[23]
Point-Set Registration: Coherent Point Drift,
A. Myronenko and X. Song, “Point-Set Registration: Coherent Point Drift,”IEEE Trans. Pattern Anal. Mach. Intell., vol. 32, no. 12, pp. 2262–2275, Dec. 2010
2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.