Recognition: 2 theorem links
· Lean TheoremVisual-RRT: Finding Paths toward Visual-Goals via Differentiable Rendering
Pith reviewed 2026-05-14 22:51 UTC · model grok-4.3
The pith
Visual-RRT unifies differentiable rendering with RRT sampling to plan robot paths from images.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By combining gradient descent steps from differentiable robot rendering with the tree expansion of RRT, the planner can explore toward visual targets, with adaptive prioritization of search regions and inherited gradient states for consistent progress.
What carries the argument
Differentiable rendering of the robot state to compute visual matching gradients that guide RRT tree growth.
If this is right
- Planning becomes possible when only visual observations of the goal are available.
- Performance demonstrated on Franka, UR5e, and Fetch robots in both sim and real.
- Adaptive strategies improve efficiency over standard RRT in visual settings.
- Bridges the gap between classical sampling planners and vision-based robotics.
Where Pith is reading between the lines
- Similar gradient integration might apply to other sampling-based planners like PRM.
- Future work could handle occlusions or changing lighting by improving the rendering model.
- Real-time performance may depend on rendering speed, suggesting use of approximate models.
Load-bearing premise
Differentiable rendering can generate accurate and usable gradients that correctly indicate how to adjust the robot to better match the visual goal.
What would settle it
A test case where the visual goal is an image of the robot in a certain pose, but following the rendering gradients leads the planner away from that pose instead of toward it.
Figures





read the original abstract
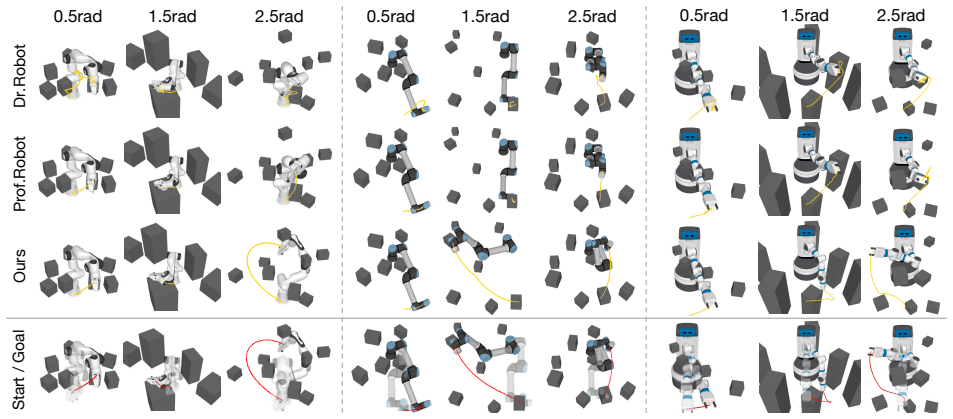
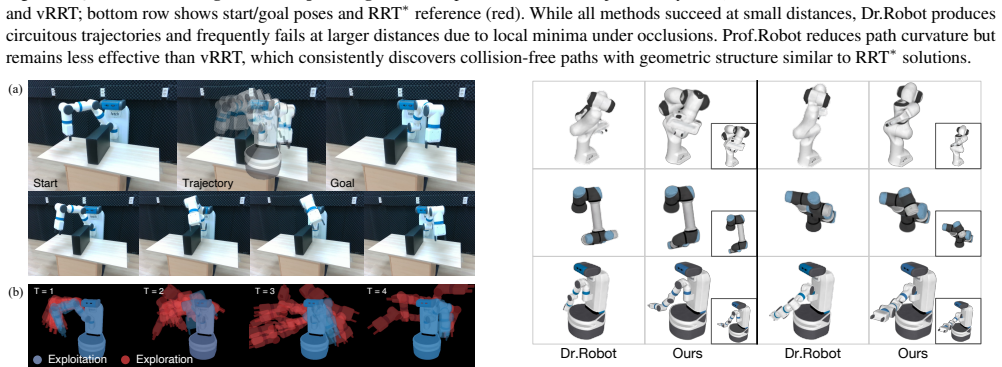
Rapidly-exploring random trees (RRTs) have been widely adopted for robot motion planning due to their robustness and theoretical guarantees. However, existing RRT-based planners require explicit goal configurations specified as numerical joint angles, while many practical applications provide goal specifications through visual observations such as images or demonstration videos where precise goal configurations are unavailable. In this paper, we propose visual-RRT (vRRT), a motion planner that enables visual-goal planning by unifying gradient-based exploitation from differentiable robot rendering with sampling-based exploration from RRTs. We further introduce (i) a frontier-based exploration-exploitation strategy that adaptively prioritizes visually promising search regions, and (ii) inertial gradient tree expansion that inherits optimization states across tree branches for momentum-consistent gradient exploitation. Extensive experiments across various robot manipulators including Franka, UR5e, and Fetch demonstrate that vRRT achieves effective visual-goal planning in both simulated and real-world settings, bridging the gap between sampling-based planning and vision-centric robot applications. Our code is available at https://sgvr.kaist.ac.kr/Visual-RRT.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces visual-RRT (vRRT), which augments standard RRT with differentiable robot rendering to enable sampling-based planning toward implicit visual goals (images or videos) rather than explicit joint configurations. It adds a frontier-based exploration-exploitation heuristic and inertial propagation of optimizer states across tree branches, and reports successful results on Franka, UR5e, and Fetch manipulators in both simulation and real-world settings.
Significance. If the gradient signals prove reliable, the approach offers a practical bridge between sampling-based planners and vision-only goal specifications, which is valuable for demonstration-based or image-specified tasks. Releasing code is a clear strength that aids verification. The core idea of using rendering gradients inside an RRT tree is technically interesting, though its robustness hinges on untested assumptions about rendering fidelity and loss landscapes.
major comments (2)
- [§3.2] §3.2 (visual loss and gradient computation): the claim that pixel/feature distance gradients reliably point toward the kinematically correct configuration is load-bearing for the entire method, yet the manuscript provides no analysis of the loss landscape or ablations on background/lighting mismatch; the skeptic concern that visually similar but distant poses can produce misleading gradients is not directly addressed.
- [§4.3] §4.3 (real-world experiments): success rates are reported without quantitative measurement of rendering-to-reality gap (e.g., pixel error under the actual camera calibration and lighting), so it is unclear whether the inertial and frontier heuristics compensate for or are undermined by systematic gradient bias.
minor comments (2)
- [§3.3] Notation for the inertial state propagation (Eq. (X)) is introduced without a compact recurrence relation, making it harder to verify momentum consistency across branches.
- [Figure 4] Figure 4 caption does not explicitly state whether the shown goal images are from the same camera pose used in the renderer, which affects interpretation of visual matching quality.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback on our paper. We address each of the major comments below and have made revisions to strengthen the manuscript accordingly.
read point-by-point responses
-
Referee: [§3.2] §3.2 (visual loss and gradient computation): the claim that pixel/feature distance gradients reliably point toward the kinematically correct configuration is load-bearing for the entire method, yet the manuscript provides no analysis of the loss landscape or ablations on background/lighting mismatch; the skeptic concern that visually similar but distant poses can produce misleading gradients is not directly addressed.
Authors: We agree that a thorough analysis of the loss landscape is important for validating the core assumption. In the revised manuscript, we have added a new subsection in Section 3 that provides an analysis of the visual loss landscape, including visualizations of gradient directions under different conditions. We also include ablations on background and lighting variations, demonstrating that while mismatches can occur, the combination of RRT exploration and our frontier heuristic effectively avoids regions with misleading gradients. For the concern regarding visually similar but distant poses, we show through additional experiments that the inertial propagation of optimizer states helps maintain momentum toward the correct configuration, reducing the impact of such local minima. revision: yes
-
Referee: [§4.3] §4.3 (real-world experiments): success rates are reported without quantitative measurement of rendering-to-reality gap (e.g., pixel error under the actual camera calibration and lighting), so it is unclear whether the inertial and frontier heuristics compensate for or are undermined by systematic gradient bias.
Authors: We appreciate this point and acknowledge that quantifying the rendering-to-reality gap would enhance the clarity of our real-world results. In the updated Section 4.3, we have included quantitative measurements of pixel errors between rendered and real images under the actual experimental conditions. These measurements indicate a moderate gap, but our results show that the frontier-based exploration-exploitation strategy and inertial gradient propagation successfully mitigate the effects of any systematic bias, leading to the reported high success rates. We discuss the implications in the revised text. revision: yes
Circularity Check
Derivation is self-contained with no circular reductions
full rationale
The vRRT planner unifies standard RRT sampling-based exploration with gradients obtained from differentiable rendering of the robot. The frontier-based exploration-exploitation strategy and inertial gradient tree expansion are presented as additional heuristics whose value is shown through simulation and real-robot experiments on Franka, UR5e, and Fetch platforms. No equations define a quantity in terms of itself, no fitted parameter is relabeled as a prediction, and no load-bearing premise rests on a self-citation chain that itself lacks independent verification. The central claim therefore remains an empirical combination of existing components rather than a tautological restatement of its inputs.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearunifies gradient-based exploitation from differentiable robot rendering with sampling-based exploration from RRTs
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclearinertial gradient tree expansion that inherits optimization states across tree branches
Reference graph
Works this paper leans on
-
[1]
Michal Adamkiewicz, Timothy Chen, Adam Caccavale, Rachel Gardner, Preston Culbertson, Jeannette Bohg, and Mac Schwager. Vision-only robot navigation in a neural ra- diance world.IEEE Robotics and Automation Letters, 7(2): 4606–4613, 2022. 2
work page 2022
-
[2]
Real-time holistic robot pose estimation with unknown states
Shikun Ban, Juling Fan, Xiaoxuan Ma, Wentao Zhu, Yu Qiao, and Yizhou Wang. Real-time holistic robot pose estimation with unknown states. InEuropean Conference on Computer Vision (ECCV), 2024. 6, 7
work page 2024
-
[3]
Splat-nav: Safe real-time robot navigation in gaussian splatting maps.IEEE Transactions on Robotics,
Timothy Chen, Ola Shorinwa, Joseph Bruno, Aiden Swann, Javier Yu, Weijia Zeng, Keiko Nagami, Philip Dames, and Mac Schwager. Splat-nav: Safe real-time robot navigation in gaussian splatting maps.IEEE Transactions on Robotics,
-
[4]
A control bar- rier function for safe navigation with online gaussian splatting maps
Timothy Chen, Aiden Swann, Javier Yu, Ola Shorinwa, Riku Murai, Monroe Kennedy, and Mac Schwager. A control bar- rier function for safe navigation with online gaussian splatting maps. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 11758–11765. IEEE, 2025. 2
work page 2025
-
[5]
Xiangning Chen, Chen Liang, Da Huang, Esteban Real, Kaiyuan Wang, Hieu Pham, Xuanyi Dong, Thang Luong, Cho-Jui Hsieh, Yifeng Lu, et al. Symbolic discovery of optimization algorithms.Advances in neural information processing systems, 36:49205–49233, 2023. 9, 10
work page 2023
-
[6]
Google DeepMind. Gemini, 2025. Generative model used for image synthesis. 12
work page 2025
-
[7]
Adaptive subgra- dient methods for online learning and stochastic optimization
John Duchi, Elad Hazan, and Yoram Singer. Adaptive subgra- dient methods for online learning and stochastic optimization. Journal of machine learning research, 12(7), 2011. 9, 10
work page 2011
-
[8]
Jiaming Fan, Xia Chen, and Xiao Liang. Uav trajectory planning based on bi-directional apf-rrt* algorithm with goal- biased.Expert systems with applications, 213:119137, 2023. 1, 2
work page 2023
-
[9]
Jonathan D Gammell, Siddhartha S Srinivasa, and Timothy D Barfoot. Informed rrt*: Optimal sampling-based path plan- ning focused via direct sampling of an admissible ellipsoidal heuristic. In2014 IEEE/RSJ international conference on in- telligent robots and systems, pages 2997–3004. IEEE, 2014. 1, 2
work page 2014
-
[10]
Raktim Gautam Goswami, Prashanth Krishnamurthy, Yann LeCun, and Farshad Khorrami. Robopepp: Vision-based robot pose and joint angle estimation through embedding pre- dictive pre-training. InIEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025. 6, 7
work page 2025
-
[11]
St-rrt*: Asymptotically-optimal bidirectional motion planning through space-time
Francesco Grothe, Valentin N Hartmann, Andreas Orthey, and Marc Toussaint. St-rrt*: Asymptotically-optimal bidirectional motion planning through space-time. In2022 International Conference on Robotics and Automation (ICRA), pages 3314–
-
[12]
Image quality metrics: Psnr vs
Alain Hore and Djemel Ziou. Image quality metrics: Psnr vs. ssim. In2010 20th international conference on pattern recognition, pages 2366–2369. IEEE, 2010. 6
work page 2010
-
[13]
2d gaussian splatting for geometrically accu- rate radiance fields
Binbin Huang, Zehao Yu, Anpei Chen, Andreas Geiger, and Shenghua Gao. 2d gaussian splatting for geometrically accu- rate radiance fields. InSIGGRAPH 2024 Conference Papers. Association for Computing Machinery, 2024. 2
work page 2024
-
[14]
Zhe Huang, Hongyu Chen, John Pohovey, and Katherine Driggs-Campbell. Neural informed rrt*: Learning-based path planning with point cloud state representations under admis- sible ellipsoidal constraints. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 8742–
-
[15]
Brian Ichter and Marco Pavone. Robot motion planning in learned latent spaces.IEEE Robotics and Automation Letters, 4(3):2407–2414, 2019. 2, 7
work page 2019
-
[16]
In-Bae Jeong, Seung-Jae Lee, and Jong-Hwan Kim. Quick- rrt*: Triangular inequality-based implementation of rrt* with improved initial solution and convergence rate.Expert Sys- tems with Applications, 123:82–90, 2019. 1
work page 2019
-
[17]
Stomp: Stochastic trajectory optimization for motion planning
Mrinal Kalakrishnan, Sachin Chitta, Evangelos Theodorou, Peter Pastor, and Stefan Schaal. Stomp: Stochastic trajectory optimization for motion planning. In2011 IEEE international conference on robotics and automation, pages 4569–4574. IEEE, 2011. 1
work page 2011
-
[18]
Sertac Karaman and Emilio Frazzoli. Sampling-based algo- rithms for optimal motion planning.The international journal of robotics research, 30(7):846–894, 2011. 1, 2, 3, 4, 5, 7
work page 2011
-
[19]
L.E. Kavraki, P. Svestka, J.-C. Latombe, and M.H. Overmars. Probabilistic roadmaps for path planning in high-dimensional configuration spaces.IEEE Transactions on Robotics and Automation, 12(4):566–580, 1996. 1
work page 1996
- [20]
-
[21]
Diederik P. Kingma and Jimmy Ba. Adam: A method for stochastic optimization. InInternational Conference on Learning Representations, 2015. 4, 9, 10
work page 2015
-
[22]
Rrt-connect: An effi- cient approach to single-query path planning
James J Kuffner and Steven M LaValle. Rrt-connect: An effi- cient approach to single-query path planning. InProceedings 2000 ICRA. Millennium conference. IEEE international con- ference on robotics and automation. Symposia proceedings (Cat. No. 00CH37065), pages 995–1001. IEEE, 2000. 1, 2, 7
work page 2000
-
[23]
Rapidly-exploring random trees: A new tool for path planning.Research Report 9811, 1998
Steven LaValle. Rapidly-exploring random trees: A new tool for path planning.Research Report 9811, 1998. 1, 3, 7, 14
work page 1998
-
[24]
Steven M. LaValle.Planning Algorithms. Cambridge Univer- sity Press, 2006. 5
work page 2006
-
[25]
Steven M LaValle and James J Kuffner Jr. Randomized kin- odynamic planning.The international journal of robotics research, 20(5):378–400, 2001. 4
work page 2001
-
[26]
Dynscene: Scalable generation of dynamic robotic manipulation scenes for embodied ai
Sangmin Lee, Sungyong Park, and Heewon Kim. Dynscene: Scalable generation of dynamic robotic manipulation scenes for embodied ai. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 12166–12175, 2025. 12
work page 2025
-
[27]
Camera-to-robot pose estimation from a single image
Timothy E Lee, Jonathan Tremblay, Thang To, Jia Cheng, Terry Mosier, Oliver Kroemer, Dieter Fox, and Stan Birch- field. Camera-to-robot pose estimation from a single image. InInternational Conference on Robotics and Automation (ICRA), 2020. 6, 7
work page 2020
-
[28]
3d-hgs: 3d half-gaussian splatting
Haolin Li, Jinyang Liu, Mario Sznaier, and Octavia Camps. 3d-hgs: 3d half-gaussian splatting. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 10996–11005, 2025. 2
work page 2025
-
[29]
Controlling diverse robots by inferring jacobian fields with deep networks
Sizhe Lester Li, Annan Zhang, Boyuan Chen, Hanna Matusik, Chao Liu, Daniela Rus, and Vincent Sitzmann. Controlling diverse robots by inferring jacobian fields with deep networks. Nature, pages 1–7, 2025. 2
work page 2025
-
[30]
Differentiable robot rendering
Ruoshi Liu, Alper Canberk, Shuran Song, and Carl V ondrick. Differentiable robot rendering. In8th Annual Conference on Robot Learning (CoRL), 2024. 1, 2, 3, 5, 6, 7, 10, 14, 15
work page 2024
-
[31]
M. Loper, Naureen Mahmood, J. Romero, Gerard Pons-Moll, and Michael J. Black. Smpl: A skinned multi-person linear model. 2023. 2, 15
work page 2023
-
[32]
Manigaussian: Dynamic gaussian splatting for multi-task robotic manipulation
Guanxing Lu, Shiyi Zhang, Ziwei Wang, Changliu Liu, Jiwen Lu, and Yansong Tang. Manigaussian: Dynamic gaussian splatting for multi-task robotic manipulation. InEuropean Conference on Computer Vision, pages 349–366. Springer,
-
[33]
Gwm: Towards scalable gaussian world models for robotic manipulation
Guanxing Lu, Baoxiong Jia, Puhao Li, Yixin Chen, Ziwei Wang, Yansong Tang, and Siyuan Huang. Gwm: Towards scalable gaussian world models for robotic manipulation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pages 9263–9274, 2025. 2
work page 2025
-
[34]
Principal components analysis (pca).Computers & Geosciences, 19(3): 303–342, 1993
Andrzej Ma ´ckiewicz and Waldemar Ratajczak. Principal components analysis (pca).Computers & Geosciences, 19(3): 303–342, 1993. 12
work page 1993
-
[35]
Joaquim Ortiz-Haro, Wolfgang Hönig, Valentin N Hartmann, Marc Toussaint, and Ludovic Righetti. idb-rrt: Sampling- based kinodynamic motion planning with motion primitives and trajectory optimization. In2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 10702–10709. IEEE, 2024. 4
work page 2024
-
[36]
Boris T Polyak. Some methods of speeding up the conver- gence of iteration methods.Ussr computational mathematics and mathematical physics, 4(5):1–17, 1964. 10
work page 1964
-
[37]
Ahmed Hussain Qureshi and Yasar Ayaz. Potential func- tions based sampling heuristic for optimal path planning.Au- tonomous Robots, 40(6):1079–1093, 2016. 1, 2
work page 2016
-
[38]
Deeply informed neural sampling for robot motion planning
Ahmed H Qureshi and Michael C Yip. Deeply informed neural sampling for robot motion planning. In2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 6582–6588. IEEE, 2018. 2
work page 2018
-
[39]
Ahmed H Qureshi, Anthony Simeonov, Mayur J Bency, and Michael C Yip. Motion planning networks. In2019 Interna- tional Conference on Robotics and Automation (ICRA), pages 2118–2124. IEEE, 2019
work page 2019
-
[40]
Motion planning networks: Bridging the gap between learning-based and classical motion planners
Ahmed Hussain Qureshi, Yinglong Miao, Anthony Simeonov, and Michael C Yip. Motion planning networks: Bridging the gap between learning-based and classical motion planners. IEEE Transactions on Robotics, 37(1):48–66, 2020. 2
work page 2020
-
[41]
Chomp: Gradient optimization techniques for efficient motion planning
Nathan Ratliff, Matt Zucker, J Andrew Bagnell, and Sid- dhartha Srinivasa. Chomp: Gradient optimization techniques for efficient motion planning. In2009 IEEE international con- ference on robotics and automation, pages 489–494. IEEE,
-
[42]
Quanyuan Ruan, Jiabao Lei, Wenhao Yuan, Yanglin Zhang, Dekun Lu, Guiliang Liu, and Kui Jia. Prof. robot: Differ- entiable robot rendering without static and self-collisions. InIEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025. 1, 2, 3, 5, 6
work page 2025
-
[43]
Finding locally optimal, collision-free trajectories with sequential convex optimiza- tion
John Schulman, Jonathan Ho, Alex X Lee, Ibrahim Awwal, Henry Bradlow, and Pieter Abbeel. Finding locally optimal, collision-free trajectories with sequential convex optimiza- tion. InRobotics: science and systems, pages 1–10. Berlin, Germany, 2013. 1
work page 2013
-
[44]
Revisiting the asymptotic op- timality of rrt
Kiril Solovey, Lucas Janson, Edward Schmerling, Emilio Frazzoli, and Marco Pavone. Revisiting the asymptotic op- timality of rrt. In2020 IEEE international conference on robotics and automation (ICRA), pages 2189–2195. IEEE,
-
[45]
Tijmen Tieleman. Lecture 6.5-rmsprop: Divide the gradient by a running average of its recent magnitude.COURSERA: Neural networks for machine learning, 4(2):26, 2012. 9, 10
work page 2012
-
[46]
Mujoco: A physics engine for model-based control
Emanuel Todorov, Tom Erez, and Yuval Tassa. Mujoco: A physics engine for model-based control. In2012 IEEE/RSJ international conference on intelligent robots and systems, pages 5026–5033. IEEE, 2012. 5, 15
work page 2012
-
[47]
Jiankun Wang, Wenzheng Chi, Chenming Li, Chaoqun Wang, and Max Q-H Meng. Neural rrt*: Learning-based optimal path planning.IEEE Transactions on Automation Science and Engineering, 17(4):1748–1758, 2020. 2
work page 2020
-
[48]
4d gaussian splatting for real-time dynamic scene rendering
Guanjun Wu, Taoran Yi, Jiemin Fang, Lingxi Xie, Xiaopeng Zhang, Wei Wei, Wenyu Liu, Qi Tian, and Xinggang Wang. 4d gaussian splatting for real-time dynamic scene rendering. InConference on Computer Vision and Pattern Recognition (CVPR), 2024. 2
work page 2024
-
[49]
Dynamic-domain rrts: Efficient explo- ration by controlling the sampling domain
Anna Yershova, Léonard Jaillet, Thierry Siméon, and Steven M LaValle. Dynamic-domain rrts: Efficient explo- ration by controlling the sampling domain. InProceedings of the 2005 IEEE international conference on robotics and automation, pages 3856–3861. IEEE, 2005. 1, 2
work page 2005
-
[50]
Ying Zhang, Heyong Wang, Maoliang Yin, Jiankun Wang, and Changchun Hua. Bi-am-rrt*: A fast and efficient sampling-based motion planning algorithm in dynamic envi- ronments.IEEE Transactions on Intelligent Vehicles, 9(1): 1282–1293, 2023. 1, 2
work page 2023
-
[51]
EGGS: Ex- changeable 2d/3d gaussian splatting for geometry-appearance balanced novel view synthesis
Yancheng Zhang, Guangyu Sun, and Chen Chen. EGGS: Ex- changeable 2d/3d gaussian splatting for geometry-appearance balanced novel view synthesis. InThe Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025. 2
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.