Recognition: no theorem link
An Edge-Host-Cloud Architecture for Robot-Agnostic, Caregiver-in-the-Loop Personalized Cognitive Exercise: Multi-Site Deployment in Dementia Care
Pith reviewed 2026-05-13 22:57 UTC · model grok-4.3
The pith
Speaking Memories delivers personalized dementia cognitive exercises through a robot-agnostic edge-host-cloud system that incorporates caregiver biographical knowledge and achieves sub-6-second latency.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The platform establishes a generalizable robotics architecture that integrates caregiver-authored structured biographical knowledge, local edge intelligence, and embodied agents into a unified loop, enabling personalized emotion-aware dialogue and scalable deployment across heterogeneous robots with privacy preservation and low latency.
What carries the argument
The local edge interaction server that decouples multimodal perception, reasoning, and dialogue policy conditioning from specific robot hardware, supported by the cloud portal for ingesting and structuring caregiver biographical knowledge.
If this is right
- Enables the same core interaction logic to run on different robotic platforms without hardware-specific redesign.
- Supports accumulation of biographical data over sessions for longitudinal personalization of exercises.
- Generates structured metrics at scale that can drive data-driven model updates and inform intervention planning.
- Keeps sensitive processing local to preserve privacy while still allowing remote caregiver contributions.
- Provides a template for similar stakeholder-in-the-loop systems in other care domains.
Where Pith is reading between the lines
- The architecture could be tested for adaptation to other cognitive support needs such as post-stroke rehabilitation or mild cognitive impairment.
- The collected interaction metrics might serve as a starting point for standardized benchmarks of robotic cognitive engagement tools.
- Integration of the evaluation layer with electronic health records could allow clinicians to review engagement patterns directly.
- Scaling to additional sites would reveal whether the edge-cloud split maintains performance as network variability increases.
Load-bearing premise
Caregiver-authored biographical knowledge can be reliably structured and used to condition dialogue policies across heterogeneous robots and sites without introducing inconsistencies or privacy issues.
What would settle it
A multi-site deployment in which caregiver-provided knowledge produces inconsistent or inappropriate dialogue responses or where measured end-to-end latency exceeds six seconds under normal operating conditions.
Figures




read the original abstract
We present Speaking Memories, a distributed, stakeholder-in-the-loop robotic interaction platform for personalized cognitive exercise support. Rather than a single robot-centric system, Speaking Memories is designed as a generalizable robotics architecture that integrates caregiver-authored knowledge, local edge intelligence, and embodied robotic agents into a unified socio-technical loop. The platform fuses auditory, visual, and textual signals to enable emotion-aware, personalized dialogue, while decoupling multimodal perception and reasoning from robot-specific hardware through a local edge interaction server. This design achieves low-latency, privacy-preserving operation and supports scalable deployment across heterogeneous robotic embodiments. Caregivers and family members contribute structured biographical knowledge via a secure cloud portal, which conditions downstream dialogue policies and enables longitudinal personalization across interaction sessions. Beyond real-time interaction, the system incorporates an automated multimodal evaluation layer that continuously analyzes user responses, affective cues, and engagement patterns, producing structured interaction metrics at scale. These metrics support systematic assessment of interaction quality, enable data-driven model fine-tuning, and lay the foundation for future clinician- and caregiver-informed personalization and intervention planning. We evaluate the platform through real-world deployments, measuring end-to-end latency, dialogue coherence, interaction stability, and stakeholder-reported usability and engagement. Results demonstrate sub-6-second response latency, robust multimodal synchronization, and consistently positive feedback from both participants and caregivers. Furthermore, subsets of the dataset can be shared upon request, subject to participant consent and IRB constraints.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
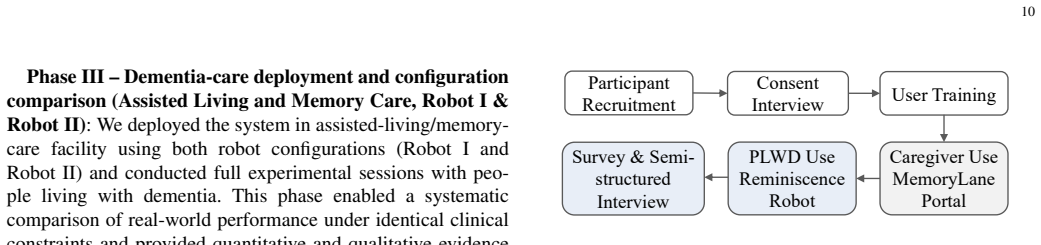
Summary. The paper presents Speaking Memories, a distributed edge-host-cloud architecture for robot-agnostic, caregiver-in-the-loop personalized cognitive exercise in dementia care. Caregivers contribute structured biographical knowledge via a secure cloud portal that conditions dialogue policies; a local edge server handles multimodal (auditory/visual/textual) perception and emotion-aware reasoning while decoupling these from specific robot hardware. The system includes an automated evaluation layer for interaction metrics. Real-world multi-site deployments are reported to achieve sub-6-second end-to-end response latency, robust multimodal synchronization, and consistently positive feedback from participants and caregivers, with subsets of data available under consent constraints.
Significance. If the quantitative deployment results can be substantiated, the work would offer a practical, generalizable framework for scalable robotic cognitive support that preserves privacy through edge processing, incorporates longitudinal caregiver input, and generates structured metrics for ongoing assessment. This could meaningfully advance socio-technical systems in dementia care by demonstrating hardware-agnostic operation across heterogeneous robots and sites.
major comments (2)
- [Evaluation / Abstract] Evaluation section / Abstract: The headline claims of sub-6-second response latency, robust multimodal synchronization, and consistently positive feedback are stated without any quantitative backing—participant counts, site counts, session volumes, hardware specifications for the edge server, precise latency measurement definition (utterance to robot output including network/cloud round-trips), synchronization tolerance metric, feedback instrument (survey items, scale, completion rate), or statistical tests. This absence prevents assessment of generalizability across robots and realistic network conditions.
- [Abstract] Abstract: The decoupling claim (multimodal perception and reasoning separated from robot-specific hardware) is central to the architecture's generality, yet the manuscript provides no concrete evidence—such as cross-robot latency or synchronization comparisons—that this separation was successfully maintained or tested in the reported deployments.
Simulated Author's Rebuttal
We are grateful to the referee for the insightful comments that will help improve the clarity and rigor of our manuscript. We respond to each major comment below.
read point-by-point responses
-
Referee: [Evaluation / Abstract] Evaluation section / Abstract: The headline claims of sub-6-second response latency, robust multimodal synchronization, and consistently positive feedback are stated without any quantitative backing—participant counts, site counts, session volumes, hardware specifications for the edge server, precise latency measurement definition (utterance to robot output including network/cloud round-trips), synchronization tolerance metric, feedback instrument (survey items, scale, completion rate), or statistical tests. This absence prevents assessment of generalizability across robots and realistic network conditions.
Authors: We concur that the abstract and Evaluation section would benefit from more detailed quantitative information to support the headline claims. In the revised manuscript, we will augment the Evaluation section with the following: participant and site counts, session volumes, edge server hardware specifications, a clear definition of the end-to-end latency (including the measurement points from utterance to robot output and accounting for network and cloud round-trips), the synchronization tolerance metric, specifics of the feedback instrument (including survey items, scale, and completion rate), and results of any statistical tests. Additionally, we will discuss the implications for generalizability across robots and under realistic network conditions. revision: yes
-
Referee: [Abstract] Abstract: The decoupling claim (multimodal perception and reasoning separated from robot-specific hardware) is central to the architecture's generality, yet the manuscript provides no concrete evidence—such as cross-robot latency or synchronization comparisons—that this separation was successfully maintained or tested in the reported deployments.
Authors: The decoupling of multimodal perception and reasoning from robot-specific hardware is implemented via the local edge server using abstract interfaces. We agree that providing concrete evidence from the deployments would better substantiate this claim. In the revision, we will add cross-robot comparisons, including latency and synchronization metrics from the different robotic embodiments used in the multi-site deployments, to demonstrate that the separation was maintained and tested. revision: yes
Circularity Check
No significant circularity; results are deployment observations without self-referential derivations
full rationale
The paper presents a distributed robotics architecture and reports measured outcomes from real-world deployments (sub-6s latency, multimodal synchronization, positive feedback). No equations, fitted parameters, predictions, or uniqueness theorems are described that reduce claims to inputs by construction. Claims rest on observational data rather than self-citations or definitional loops, making the derivation chain self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Multimodal auditory, visual, and textual signals can be fused to produce coherent, emotion-aware dialogue responses
- domain assumption Structured biographical knowledge from caregivers can condition dialogue policies for longitudinal personalization
Reference graph
Works this paper leans on
- [1]
-
[2]
Socially assistive robots in elderly care: a systematic review into effects and effectiveness,
R. Bemelmans, G. J. Gelderblom, P. Jonker, and L. De Witte, “Socially assistive robots in elderly care: a systematic review into effects and effectiveness,” Journal of the American Medical Directors Association , vol. 13, no. 2, pp. 114–120, 2012
work page 2012
-
[3]
Dementia prevention, intervention, and care: 2020 report of the lancet commission,
G. Livingston, J. Huntley, A. Sommerlad, D. Ames, C. Ballard, S. Baner- jee, C. Brayne, A. Burns, J. Cohen-Mansfield, C. Cooper et al. , “Dementia prevention, intervention, and care: 2020 report of the lancet commission,” The lancet, vol. 396, no. 10248, pp. 413–446, 2020
work page 2020
-
[4]
P. R. de la Bletiere, M. Neerincx, R. Schaefer, and C. Oertel, “A frame- work for music-evoked autobiographical memories in robot-assisted tasks for people with dementia.”
-
[5]
M. J. Matari ´c and B. Scassellati, “Socially assistive robotics,” Springer handbook of robotics , pp. 1973–1994, 2016
work page 1973
-
[6]
M. Fu, Z. Shi, M. Huang, S. Liu, M. Kian, Y . Song, and M. J. Matari´c, “Personalized socially assistive robots with end-to-end speech- language models for well-being support,” 2025. [Online]. Available: https://arxiv.org/abs/2507.14412
-
[7]
K. Park, S. Lee, J. Yang, T. Song, and G.-R. S. Hong, “A systematic review and meta-analysis on the effect of reminiscence therapy for people with dementia,” International psychogeriatrics, vol. 31, no. 11, pp. 1581–1597, 2019
work page 2019
-
[8]
Positive emotional responses to socially assistive robots in people with dementia: pilot study,
E. Otaka, A. Osawa, K. Kato, Y . Obayashi, S. Uehara, M. Kamiya, K. Mizuno, S. Hashide, I. Kondo et al. , “Positive emotional responses to socially assistive robots in people with dementia: pilot study,” JMIR aging, vol. 7, no. 1, p. e52443, 2024
work page 2024
-
[9]
Cognitive exercise for persons with alzheimer’s disease and related dementia using a social robot,
M. Boltz, D. Bilal, Y .-L. Jao, M. Crane, J. Duzan, A. Bahour, and X. Zhao, “Cognitive exercise for persons with alzheimer’s disease and related dementia using a social robot,” IEEE Transactions on Robotics , vol. 39, no. 4, pp. 3332–3346, 2023
work page 2023
-
[10]
Z. Shi, T. R. Groechel, S. Jain, K. Chima, O. Rudovic, and M. J. Matari ´c, “Toward personalized affect-aware socially assistive robot tutors for long-term interventions with children with autism,” ACM Transactions on Human-Robot Interaction (THRI) , vol. 11, no. 4, pp. 1–28, 2022
work page 2022
-
[11]
The benefits of and barriers to using a social robot paro in care settings: a scoping review,
L. Hung, C. Liu, E. Woldum, A. Au-Yeung, A. Berndt, C. Wallsworth, N. Horne, M. Gregorio, J. Mann, and H. Chaudhury, “The benefits of and barriers to using a social robot paro in care settings: a scoping review,”BMC geriatrics, vol. 19, no. 1, p. 232, 2019
work page 2019
-
[12]
Robots for elderly care: review, multi-criteria optimization model and qualitative case study,
B. Sawik, S. Tobis, E. Baum, A. Suwalska, S. Kropi ´nska, K. Stachnik, E. P´erez-Bernabeu, M. Cildoz, A. Agustin, and K. Wieczorowska-Tobis, “Robots for elderly care: review, multi-criteria optimization model and qualitative case study,” in Healthcare, vol. 11, no. 9. MDPI, 2023, p. 1286
work page 2023
-
[13]
Lami: Large language models for multi-modal human-robot interaction,
C. Wang, S. Hasler, D. Tanneberg, F. Ocker, F. Joublin, A. Ceravola, J. Deigmoeller, and M. Gienger, “Lami: Large language models for multi-modal human-robot interaction,” in Extended Abstracts of the CHI Conference on Human Factors in Computing Systems , 2024, pp. 1–10
work page 2024
-
[14]
Dobby: a conversational service robot driven by gpt-4,
C. Stark, B. Chun, C. Charleston, V . Ravi, L. Pabon, S. Sunkari, T. Mohan, P. Stone, and J. Hart, “Dobby: a conversational service robot driven by gpt-4,” in 2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN) . IEEE, 2024, pp. 1362–1369
work page 2024
-
[15]
Defining socially assistive robotics,
D. Feil-Seifer and M. J. Mataric, “Defining socially assistive robotics,” in 9th International Conference on Rehabilitation Robotics, 2005. ICORR
work page 2005
-
[16]
IEEE, 2005, pp. 465–468
work page 2005
-
[17]
Kaspar–a minimally expressive humanoid robot for human–robot interaction research,
K. Dautenhahn, C. L. Nehaniv, M. L. Walters, B. Robins, H. Kose- Bagci, N. A. Mirza, and M. Blow, “Kaspar–a minimally expressive humanoid robot for human–robot interaction research,” Applied Bionics and Biomechanics, vol. 6, no. 3-4, pp. 369–397, 2009
work page 2009
-
[18]
Use of a humanoid robot in supporting dementia care: a qualitative analysis,
Y .-J. Liao, Y .-L. Jao, M. Boltz, O. T. Adekeye, D. Berish, and X. Zhao, “Use of a humanoid robot in supporting dementia care: a qualitative analysis,” SAGE open nursing , vol. 9, p. 23779608231179528, 2023
work page 2023
-
[19]
A systematic review of robotic rehabilitation for cognitive training,
E. Klavon, Z. Liu, and X. Zhao, “A systematic review of robotic rehabilitation for cognitive training,”Frontiers in Robotics and AI, vol. 8, p. 605715, 2021
work page 2021
-
[20]
Edge robotics: Edge-computing-accelerated multirobot simultaneous localization and mapping,
P. Huang, L. Zeng, X. Chen, K. Luo, Z. Zhou, and S. Yu, “Edge robotics: Edge-computing-accelerated multirobot simultaneous localization and mapping,” IEEE Internet of Things Journal , vol. 9, no. 15, pp. 14 087– 14 102, 2022
work page 2022
-
[21]
Cloud robotics: architecture, challenges and applications,
G. Hu, W. P. Tay, and Y . Wen, “Cloud robotics: architecture, challenges and applications,” IEEE network, vol. 26, no. 3, pp. 21–28, 2012
work page 2012
-
[22]
J. Zhang, F. Keramat, X. Yu, D. M. Hern ´andez, J. P. Queralta, and T. Westerlund, “Distributed robotic systems in the edge-cloud continuum with ros 2: A review on novel architectures and technology readiness,” in 2022 Seventh International Conference on Fog and Mobile Edge Computing (FMEC). IEEE, 2022, pp. 1–8
work page 2022
-
[23]
S. Anari, R. Ranjbarzadeh, M. Cunneen, and M. Bendechache, “Privacy- preserving federated learning for human intention modeling in pediatric cerebral palsy using extended reality,” in 2025 IEEE 49th Annual Computers, Software, and Applications Conference (COMPSAC). IEEE, 2025, pp. 1–6
work page 2025
-
[24]
C. Yang, Y . Wang, S. Lan, L. Wang, W. Shen, and G. Q. Huang, “Cloud-edge-device collaboration mechanisms of deep learning models for smart robots in mass personalization,” Robotics and Computer- Integrated Manufacturing, vol. 77, p. 102351, 2022
work page 2022
-
[25]
M. Otake-Matsuura, S. Tokunaga, K. Watanabe, M. S. Abe, T. Sekiguchi, H. Sugimoto, T. Kishimoto, and T. Kudo, “Cognitive intervention through photo-integrated conversation moderated by robots (picmor) program: a randomized controlled trial,” Frontiers in Robotics and AI , vol. 8, p. 633076, 2021
work page 2021
-
[26]
R. Zhang, D. Bilal, and X. Zhao, “Learning-based strategy design for robot-assisted reminiscence therapy based on a developed model for people with dementia,” in International Conference on Social Robotics . Springer, 2021, pp. 432–442
work page 2021
-
[27]
C.-J. Hsieh, P.-S. Li, C.-H. Wang, S.-L. Lin, T.-C. Hsu, and C.-M. T. Tsai, “Socially assistive robots for people living with dementia in long- term facilities: a systematic review and meta-analysis of randomized controlled trials,” Gerontology, vol. 69, no. 8, pp. 1027–1042, 2023
work page 2023
-
[28]
OpenAI, “Gpt-4v(ision) system card,” 2023. [Online]. Available: https://api.semanticscholar.org/CorpusID:263218031
work page 2023
-
[29]
Palm-e: An embodied multimodal language model,
D. Driess, F. Xia, M. S. Sajjadi, C. Lynch, A. Chowdhery, A. Wahid, J. Tompson, Q. Vuong, T. Yu, W. Huang et al., “Palm-e: An embodied multimodal language model,” 2023
work page 2023
-
[30]
Rt-2: Vision-language-action models transfer web knowledge to robotic control,
B. Zitkovich, T. Yu, S. Xu, P. Xu, T. Xiao, F. Xia, J. Wu, P. Wohlhart, S. Welker, A. Wahid et al. , “Rt-2: Vision-language-action models transfer web knowledge to robotic control,” in Conference on Robot Learning. PMLR, 2023, pp. 2165–2183
work page 2023
-
[31]
Inner Monologue: Embodied Reasoning through Planning with Language Models
W. Huang, F. Xia, T. Xiao, H. Chan, J. Liang, P. Florence, A. Zeng, J. Tompson, I. Mordatch, Y . Chebotaret al., “Inner monologue: Embod- ied reasoning through planning with language models,” arXiv preprint arXiv:2207.05608, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[32]
D. Zhou, E. I. Barakova, P. An, and M. Rauterberg, “Assistant robot enhances the perceived communication quality of people with dementia: A proof of concept,” IEEE Transactions on Human-Machine Systems , vol. 52, no. 3, pp. 332–342, 2021
work page 2021
-
[33]
Effectiveness of companion robot care for dementia: a systematic review and meta-analysis,
L.-C. Lu, S.-H. Lan, Y .-P. Hsieh, L.-Y . Lin, S.-J. Lan, and J.-C. Chen, “Effectiveness of companion robot care for dementia: a systematic review and meta-analysis,”Innovation in aging, vol. 5, no. 2, p. igab013, 2021
work page 2021
-
[34]
Dialogue systems and conversational agents for patients with dementia: The human–robot interaction,
A. Russo, G. D’Onofrio, A. Gangemi, F. Giuliani, M. Mongiovi, F. Ricciardi, F. Greco, F. Cavallo, P. Dario, D. Sancarloet al., “Dialogue systems and conversational agents for patients with dementia: The human–robot interaction,” Rejuvenation research , vol. 22, no. 2, pp. 109–120, 2019
work page 2019
-
[35]
A. Nyamathi, N. Dutt, J.-A. Lee, A. M. Rahmani, M. Rasouli, D. Krogh, E. Krogh, D. Sultzer, H. Rashid, H. Liaqat et al. , “Establishing the foundations of emotional intelligence in care companion robots to mitigate agitation among high-risk patients with dementia: protocol for an empathetic patient-robot interaction study,”JMIR Research Protocols, vol. 13...
work page 2024
-
[36]
R. P. Lopez, A. Wei, J. R. Locke, and E. Plys, “Advanced-comfort: Usability testing of a care planning intervention for nursing home residents with advanced dementia,” Journal of Gerontological Nursing , vol. 49, no. 11, pp. 15–23, 2023
work page 2023
-
[37]
Robust speech recognition via large-scale weak supervi- sion,
A. Radford, J. W. Kim, T. Xu, G. Brockman, C. McLeavey, and I. Sutskever, “Robust speech recognition via large-scale weak supervi- sion,” in International conference on machine learning . PMLR, 2023, pp. 28 492–28 518. 21
work page 2023
-
[38]
Design and validation of a frame- work for the creation of user experience questionnaires,
M. Schrepp and J. Thomaschewski, “Design and validation of a frame- work for the creation of user experience questionnaires,” IJIMAI, vol. 5, no. 7, pp. 88–95, 2019
work page 2019
-
[39]
J. Jiang, J. C. Johnson, M.-C. Requena-Komuro, E. Benhamou, H. Sivasathiaseelan, A. Chokesuwattanaskul, A. Nelson, R. Nortley, R. S. Weil, A. V olkmeret al., “Comprehension of acoustically degraded emotional prosody in alzheimer’s disease and primary progressive apha- sia,” Scientific Reports, vol. 14, no. 1, p. 31332, 2024
work page 2024
-
[40]
V . D. Badal, J. M. Reinen, E. W. Twamley, E. E. Lee, R. P. Fellows, E. Bilal, and C. A. Depp, “Investigating acoustic and psycholinguistic predictors of cognitive impairment in older adults: modeling study,” JMIR aging, vol. 7, no. 1, p. e54655, 2024
work page 2024
-
[41]
Artificial emotional intelligence in socially assistive robots for older adults: a pilot study,
H. Abdollahi, M. H. Mahoor, R. Zandie, J. Siewierski, and S. H. Qualls, “Artificial emotional intelligence in socially assistive robots for older adults: a pilot study,” IEEE Transactions on Affective Computing , vol. 14, no. 3, pp. 2020–2032, 2022
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.