Recognition: unknown
Monotone but Exciting: On Evolving Monotone Boolean Functions with High Nonlinearity
Pith reviewed 2026-05-10 05:23 UTC · model grok-4.3
The pith
Evolutionary search can discover monotone Boolean functions with nonlinearities exceeding those of majority functions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
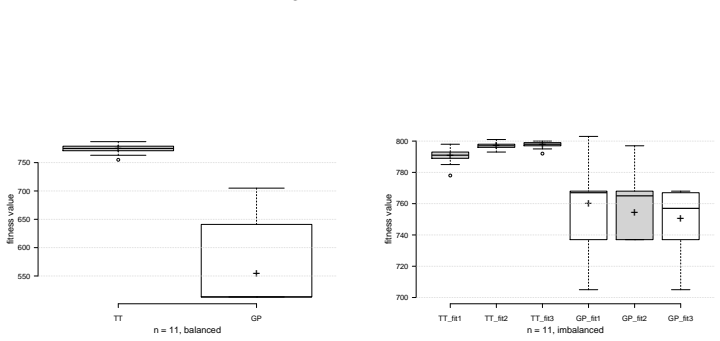
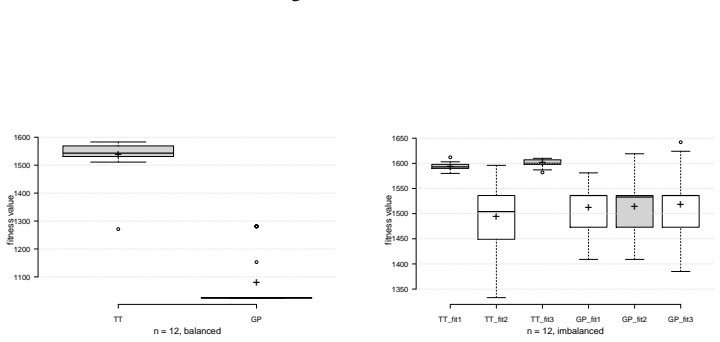
By combining evolutionary algorithms with a non-monotonicity penalty in the fitness function, it is possible to evolve monotone Boolean functions whose nonlinearity surpasses that of the majority function for several dimensions between 5 and 14, and in some cases approaches the highest known values for monotone functions.
What carries the argument
A fitness function that adds a non-monotonicity penalty to objectives for nonlinearity and balancedness, applied across truth-table and genetic-programming encodings within an evolutionary search process.
If this is right
- Monotone Boolean functions can achieve nonlinearities higher than those produced by the majority function.
- The standard truth-table encoding remains competitive through dimension 14.
- Genetic programming encodings become especially effective for the largest dimensions tested.
- Balanced truth-table encodings degrade sharply as dimension increases.
Where Pith is reading between the lines
- The same penalty technique could be tested on other constrained Boolean-function properties such as resilience or correlation immunity.
- Hybrid encodings that combine truth tables with tree representations might improve results at still higher dimensions.
- If the method continues to scale, it may supply concrete examples useful for studying the gap between algebraic constructions and search-based constructions of monotone functions.
Load-bearing premise
The non-monotonicity penalty term reliably steers the search toward truly monotone functions without excluding high-nonlinearity candidates or introducing bias in the reported comparisons.
What would settle it
Direct verification that each reported function is monotone (no input flip from 0 to 1 decreases the output) together with exact nonlinearity computation for the best functions at n=10 or n=12 would confirm or refute the claimed improvements.
Figures





read the original abstract
Monotone Boolean functions are a structurally important class of Boolean functions, but their restricted form imposes strong limitations on achievable nonlinearity. In this paper, we investigate whether evolutionary computation can evolve monotone Boolean functions with high nonlinearity, both in the balanced and imbalanced settings. We consider three solution encodings: the standard truth table representation, a balanced truth table encoding that preserves Hamming weight, and a symbolic tree-based genetic programming representation. To guide the search toward monotone increasing functions, we introduce a non-monotonicity penalty and combine it with fitness functions targeting balancedness and nonlinearity. Experimental results are reported for dimensions from $n=5$ to $n=14$. The results show that evolutionary search can discover monotone Boolean functions with nonlinearities clearly exceeding those of majority functions, and in several cases approaching the best currently known values for monotone functions. At the same time, the experiments reveal substantial differences between encodings: the balanced truth table encoding performs poorly for larger dimensions, while the standard truth table and genetic programming encodings remain competitive, with genetic programming becoming especially relevant in the largest tested dimensions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper investigates whether evolutionary algorithms can evolve monotone Boolean functions with nonlinearity exceeding that of majority functions (and approaching known best monotone values) for n=5 to n=14. It compares three encodings—standard truth table, balanced truth table, and tree-based genetic programming—using a composite fitness function that rewards nonlinearity and balancedness while penalizing non-monotonicity. Experiments show that standard truth table and GP encodings are competitive, with GP performing well at larger n, while balanced truth table encoding degrades.
Significance. If the reported functions are verifiably monotone, the work provides concrete evidence that evolutionary search can usefully explore the constrained space of monotone functions beyond hand-crafted constructions such as the majority function. The multi-encoding comparison and the demonstration that nonlinearity can approach known upper bounds for monotone functions would be useful for researchers studying Boolean function properties in cryptography and circuit complexity. The absence of parameter-free derivations or machine-checked proofs is offset by the empirical nature of the contribution.
major comments (3)
- [Methods] Methods section (fitness function definition): the non-monotonicity penalty is introduced to steer search toward monotone functions, yet the manuscript provides no formula for the penalty term, no value of the weighting coefficient, and no report of the final penalty values attained by the best individuals. Without these details it is impossible to confirm that the reported nonlinearities belong to strictly monotone functions rather than functions with small violations that still score well on the nonlinearity component.
- [Experimental Results] Experimental results (n=5..14 tables/figures): the abstract and results claim nonlinearities “clearly exceeding” majority functions and “approaching the best currently known values,” but no number of independent runs, no standard deviations or error bars, and no statistical comparison are supplied. This leaves the central empirical claim only partially supported and prevents assessment of whether the observed improvements are robust.
- [Results] Results section: although the paper states that the evolved functions are monotone, no post-hoc verification (e.g., exhaustive check that f(x) ≤ f(y) whenever x ≤ y in the Boolean lattice, or confirmation that the penalty term is exactly zero) is described for the final reported functions. Such verification is load-bearing for the claim that the nonlinearity figures are valid for the monotone class.
minor comments (2)
- [Abstract] The abstract and introduction should explicitly cite the best-known nonlinearity values for monotone functions that the evolved results are said to approach.
- [Methods] Notation for the three encodings and the precise definition of balancedness in the fitness function could be clarified with a small table or pseudocode snippet.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review of our manuscript. We address each of the major comments point by point below. We believe the suggested revisions will strengthen the paper and will incorporate them in the revised version.
read point-by-point responses
-
Referee: [Methods] Methods section (fitness function definition): the non-monotonicity penalty is introduced to steer search toward monotone functions, yet the manuscript provides no formula for the penalty term, no value of the weighting coefficient, and no report of the final penalty values attained by the best individuals. Without these details it is impossible to confirm that the reported nonlinearities belong to strictly monotone functions rather than functions with small violations that still score well on the nonlinearity component.
Authors: We agree that the manuscript lacked sufficient detail on the fitness function components. In the revised manuscript, we will explicitly provide the formula for the non-monotonicity penalty term, the value of the weighting coefficient in the composite fitness, and confirm that the best individuals achieved a penalty value of zero. This will allow readers to verify that the reported functions are strictly monotone. revision: yes
-
Referee: [Experimental Results] Experimental results (n=5..14 tables/figures): the abstract and results claim nonlinearities “clearly exceeding” majority functions and “approaching the best currently known values,” but no number of independent runs, no standard deviations or error bars, and no statistical comparison are supplied. This leaves the central empirical claim only partially supported and prevents assessment of whether the observed improvements are robust.
Authors: The experiments were run multiple times to ensure reliability, but we did not report the number of runs or variability measures in the original submission. We will revise the Experimental Results section to specify the number of independent runs, include standard deviations for the achieved nonlinearities, and add error bars to the relevant figures. While we did not include formal statistical tests, the consistency of the best results across runs supports the claims; we can add a brief discussion of this if required. revision: yes
-
Referee: [Results] Results section: although the paper states that the evolved functions are monotone, no post-hoc verification (e.g., exhaustive check that f(x) ≤ f(y) whenever x ≤ y in the Boolean lattice, or confirmation that the penalty term is exactly zero) is described for the final reported functions. Such verification is load-bearing for the claim that the nonlinearity figures are valid for the monotone class.
Authors: We concur that a description of the verification process is necessary. Although the search process with the penalty term ensures monotonicity for zero-penalty solutions, we will add to the Results section an explicit statement that post-hoc exhaustive verification was performed on all reported functions, confirming that the penalty term is zero and that the monotonicity condition holds for all comparable pairs in the lattice. revision: yes
Circularity Check
No significant circularity in evolutionary search results
full rationale
The paper reports experimental outcomes from applying evolutionary algorithms (truth-table and GP encodings) to optimize Boolean functions under a composite fitness that includes nonlinearity, balancedness, and an explicit non-monotonicity penalty. All measured quantities (nonlinearity values, monotonicity status) are computed directly from the evolved truth tables after search terminates; none are obtained by fitting a parameter to a subset of the same data and then re-reporting it as a prediction. No self-citation chain, uniqueness theorem, or ansatz is invoked to justify the central claim that the evolved functions exceed majority nonlinearity while remaining monotone. The derivation chain is therefore self-contained and consists of standard search against externally defined objectives.
Axiom & Free-Parameter Ledger
free parameters (1)
- non-monotonicity penalty coefficient
axioms (2)
- standard math A Boolean function is monotone increasing if flipping any input bit from 0 to 1 never changes the output from 1 to 0.
- standard math Nonlinearity is measured by the maximum absolute Walsh-Hadamard coefficient.
Reference graph
Works this paper leans on
-
[1]
C. Carlet. On the nonlinearity of monotone boolean functions.Cryptography and Communications, 10(6):1051–1061, Oct. 2017
2017
-
[2]
Carlet.Boolean Functions for Cryptography and Coding Theory
C. Carlet.Boolean Functions for Cryptography and Coding Theory. Cambridge University Press, Cambridge, 2021
2021
-
[3]
Carlet, M
C. Carlet, M. Durasevic, D. Jakobovic, L. Mariot, and S. Picek.Look into the Mirror: Evolving Self-dual Bent Boolean Functions, page 161–175. Springer Nature Switzerland, 2024
2024
-
[4]
Carlet, M
C. Carlet, M. Durasevic, D. Jakobovic, S. Picek, and L. Mariot. A systematic study on the design of odd-sized highly nonlinear boolean functions via evolutionary algorithms.Genetic Programming and Evolvable Machines, 27(1), Dec. 2025
2025
-
[5]
Carlet, D
C. Carlet, D. Joyner, P. St˘anic˘a, and D. Tang. Cryptographic properties of monotone Boolean functions.Journal of Mathematical Cryptology, 10(1):1–14, 2016
2016
-
[6]
Carlet and P
C. Carlet and P. Méaux. A complete study of two classes of boolean functions: Direct sums of monomials and threshold functions.IEEE Transactions on Infor- mation Theory, 68(5):3404–3425, 2022
2022
-
[7]
Djurasevic, D
M. Djurasevic, D. Jakobovic, L. Mariot, and S. Picek. A survey of metaheuristic algorithms for the design of cryptographic Boolean functions.Cryptography and Communications, 15(6):1171–1197, July 2023
2023
-
[8]
Fuller, E
J. Fuller, E. Dawson, and W. Millan. Evolutionary generation of bent functions for cryptography. InProceedings of the IEEE Congress on Evolutionary Computation, CEC 2003, Canberra, Australia, December 8-12, 2003, pages 1655–1661. IEEE, 2003
2003
-
[9]
Hrbacek and V
R. Hrbacek and V . Dvorak. Bent function synthesis by means of cartesian genetic programming. In T. Bartz-Beielstein, J. Branke, B. Filipiˇc, and J. Smith, editors, Parallel Problem Solving from Nature – PPSN XIII, pages 414–423, Cham, 2014. Springer International Publishing
2014
-
[10]
Husa and R
J. Husa and R. Dobai. Designing bent Boolean functions with parallelized linear genetic programming. InProceedings of the Genetic and Evolutionary Computa- tion Conference Companion, GECCO ’17, page 1825–1832, New York, NY , USA,
-
[11]
Association for Computing Machinery
-
[12]
Jakobovic, M
D. Jakobovic, M. Ðurasevi´c, S. Picek, and B. Gašperov. Ecf: A c++ framework for evolutionary computation.SoftwareX, 27:101640, 2024
2024
-
[13]
G. Kalai. Threshold phenomena and influences.Computational Complexity and Statistical Physics, pages 25–60, 2006. Lecture notes / survey
2006
-
[14]
A. Kerdock. A class of low-rate nonlinear binary codes.Information and Control, 20(2):182 – 187, 1972. 15
1972
-
[15]
A. D. Korshunov. Monotone boolean functions.Russian Mathematical Surveys, 58(5):929–1001, 2003
2003
-
[16]
F. J. MacWilliams and N. J. A. Sloane.The Theory of Error-Correcting Codes. Elsevier, Amsterdam, North Holland, 1977. ISBN: 978-0-444-85193-2
1977
-
[17]
Manzoni, L
L. Manzoni, L. Mariot, and E. Tuba. Balanced crossover operators in genetic algorithms.Swarm Evol. Comput., 54:100646, 2020
2020
-
[18]
Mariot, M
L. Mariot, M. Saletta, A. Leporati, and L. Manzoni. Heuristic search of (semi-)bent functions based on cellular automata.Nat. Comput., 21(3):377–391, 2022
2022
-
[19]
Millan, A
W. Millan, A. Clark, and E. Dawson. Heuristic design of cryptographically strong balanced Boolean functions. In K. Nyberg, editor,Advances in Cryptology — EUROCRYPT’98, pages 489–499, Berlin, Heidelberg, 1998. Springer Berlin Heidelberg
1998
-
[20]
O’Donnell.Analysis of Boolean Functions
R. O’Donnell.Analysis of Boolean Functions. Cambridge University Press, 2014
2014
-
[21]
Paulevé and S
L. Paulevé and S. Sené. Boolean networks and their dynamics: the impact of updates.International Journal of Molecular Sciences, 23(15):8671, 2022
2022
-
[22]
Picek and D
S. Picek and D. Jakobovic. Evolving algebraic constructions for designing bent Boolean functions. InProceedings of the Genetic and Evolutionary Computa- tion Conference 2016, GECCO ’16, page 781–788, New York, NY , USA, 2016. Association for Computing Machinery
2016
-
[23]
Picek, K
S. Picek, K. Knezevic, L. Mariot, D. Jakobovic, and A. Leporati. Evolving bent quaternary functions. In2018 IEEE Congress on Evolutionary Computation, CEC 2018, Rio de Janeiro, Brazil, July 8-13, 2018, pages 1–8. IEEE, 2018
2018
-
[24]
R. Poli, W. B. Langdon, and N. F. McPhee.A Field Guide to Genetic Programming. lulu.com, 2008
2008
-
[25]
O. Rothaus. On “bent” functions.Journal of Combinatorial Theory, Series A, 20(3):300 – 305, 1976
1976
-
[26]
L. Yan, J. Cui, J. Liu, G. Xu, L. Han, A. Jolfaei, and X. Zheng. Iga: An improved genetic algorithm to construct weightwise (almost) perfectly balanced boolean functions with high weightwise nonlinearity. InProceedings of the 2023 ACM Asia Conference on Computer and Communications Security, ASIA CCS ’23, page 638–648, New York, NY , USA, 2023. Association...
2023
-
[27]
M. Yang, Q. Meng, and H. Zhang. Evolutionary design of trace form bent functions. Cryptology ePrint Archive, Paper 2005/322, 2005. https://eprint.iacr.org/ 2005/322. 16
2005
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.