Recognition: unknown
Provable Coordination for LLM Agents via Message Sequence Charts
Pith reviewed 2026-05-10 04:46 UTC · model grok-4.3
The pith
Message sequence charts specify global coordination for LLM agents and project to deadlock-free local programs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
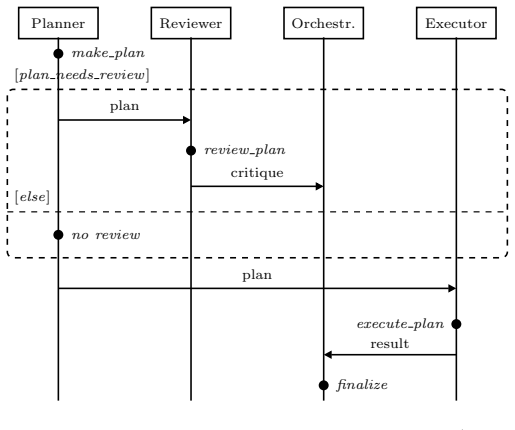
Using message sequence charts, global coordination specifications for LLM agents can be projected via a syntax-directed translation into local programs for each agent that are guaranteed to be deadlock-free. Coordination properties are thus established independently of LLM nondeterminism. The approach is demonstrated on a diagnosis consensus protocol and extended to cases where an LLM dynamically generates the coordination workflow.
What carries the argument
A syntax-directed projection from global message sequence chart specifications to local agent programs that ensures deadlock freedom by construction.
If this is right
- Coordination properties hold independently of specific LLM outputs.
- Local programs generated from the global spec are deadlock-free by construction.
- The guarantees extend to workflows dynamically generated by an LLM at runtime.
- Verification of coordination can occur at the global specification level.
Where Pith is reading between the lines
- This separation of structure from content could make multi-agent LLM systems easier to debug and maintain at scale.
- The method might combine with other formal verification techniques to check additional properties beyond deadlock freedom.
- Similar projections could support coordination in agent systems using different communication primitives.
Load-bearing premise
Message sequence charts can fully capture all necessary coordination constraints for LLM agents without missing behaviors introduced by the nondeterministic LLM actions, and the projection preserves all intended properties for any valid specification.
What would settle it
An execution trace of the projected local programs in the diagnosis consensus protocol that produces a deadlock or type-mismatched message.
Figures

read the original abstract
Multi-agent systems built on large language models (LLMs) are difficult to reason about. Coordination errors such as deadlocks or type-mismatched messages are often hard to detect through testing. We introduce a domain-specific language for specifying agent coordination based on message sequence charts (MSCs). The language separates message-passing structure from LLM actions, whose outputs remain unpredictable. We define the syntax and semantics of the language and present a syntax-directed projection that generates deadlock-free local agent programs from global coordination specifications. We illustrate the approach with a diagnosis consensus protocol and show how coordination properties can be established independently of LLM nondeterminism. We also describe a runtime planning extension in which an LLM dynamically generates a coordination workflow for which the same structural guarantees apply. An open-source Python implementation of our framework is available as ZipperGen.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces a domain-specific language for agent coordination in LLM-based multi-agent systems, grounded in message sequence charts (MSCs). It separates the fixed message-passing structure from the unpredictable outputs of LLM actions. The authors define the syntax and semantics of this language and develop a syntax-directed projection that transforms global coordination specifications into local agent programs guaranteed to be deadlock-free. They illustrate the method using a diagnosis consensus protocol and extend it to a runtime planning scenario where an LLM can dynamically generate coordination workflows while maintaining the structural guarantees. An open-source Python implementation, ZipperGen, is provided.
Significance. This approach has the potential to significantly improve the reliability of multi-agent LLM systems by providing formal, provable guarantees on coordination properties that hold independently of the nondeterministic behavior of the underlying LLMs. The syntax-directed projection ensures deadlock freedom by construction, which addresses a key challenge in deploying such systems. The runtime planning extension is particularly noteworthy as it allows flexibility without sacrificing the formal properties. The availability of an open-source implementation further strengthens the work by enabling reproducibility and practical adoption. If the semantic preservation and projection correctness are rigorously established, this could influence the design of coordination mechanisms in AI agent frameworks.
minor comments (2)
- The paper would benefit from a more explicit discussion in the related work section of how the MSC-based DSL differs from prior formalisms for multi-agent coordination, particularly regarding handling of nondeterminism.
- In the runtime planning extension, clarify with a small example how dynamically generated workflows are validated against the projection to ensure the deadlock-freedom guarantee is preserved at runtime.
Simulated Author's Rebuttal
We thank the referee for the positive summary and significance assessment of our manuscript on provable coordination for LLM agents via message sequence charts. The recommendation for minor revision is noted. No major comments were provided in the report, so we have no specific points to address point-by-point. We will handle any minor issues (such as typographical corrections or clarifications) in the revised version while preserving the core technical contributions on syntax-directed projection and deadlock freedom independent of LLM nondeterminism.
Circularity Check
No significant circularity detected
full rationale
The paper defines syntax and semantics for an MSC-based DSL that separates fixed message-passing structure from LLM actions, then uses a syntax-directed projection to produce local programs that are deadlock-free by construction. Coordination properties are thereby established independently of LLM outputs. No load-bearing step reduces by definition, fitted parameter, or self-citation chain to its own inputs; the derivation follows standard formal-methods projection techniques and remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Standard syntax and semantics of message sequence charts as defined in prior literature
Reference graph
Works this paper leans on
-
[1]
Realizability and verifi- cation of MSC graphs.Theor
Rajeev Alur, Kousha Etessami, and Mihalis Yannakakis. Realizability and verifi- cation of MSC graphs.Theor. Comput. Sci., 331(1):97–114, 2005
2005
-
[2]
Syntactic detection of process divergence and non-local choice in message sequence charts
Hanˆ ene Ben-Abdallah and Stefan Leue. Syntactic detection of process divergence and non-local choice in message sequence charts. In Ed Brinksma, editor,Tools and Algorithms for Construction and Analysis of Systems, Third International Workshop, TACAS ’97, Enschede, The Netherlands, April 2-4, 1997, Proceedings, Lecture Notes in Computer Science, pages 25...
1997
-
[3]
High-level message sequence charts: Satisfiability and realizability revisited
Benedikt Bollig, Marie Fortin, and Paul Gastin. High-level message sequence charts: Satisfiability and realizability revisited. In Elvio Gilberto Amparore and Lukasz Mikulski, editors,Application and Theory of Petri Nets and Concurrency - 46th International Conference, PETRI NETS 2025, Paris, France, June 22-27, 2025, Proceedings, Lecture Notes in Compute...
2025
-
[4]
On global types and multi-party session.Log
Giuseppe Castagna, Mariangiola Dezani-Ciancaglini, and Luca Padovani. On global types and multi-party session.Log. Methods Comput. Sci., 8(1), 2012
2012
-
[5]
Crewai: Multi-agent orchestration framework.https://github.com/ crewaiinc/crewai, 2024
CrewAI, Inc. Crewai: Multi-agent orchestration framework.https://github.com/ crewaiinc/crewai, 2024. Accessed: 2026-04-10
2024
-
[6]
The Lean 4 theorem prover and pro- gramming language
Leonardo de Moura and Sebastian Ullrich. The Lean 4 theorem prover and pro- gramming language. In Andr´ e Platzer and Geoff Sutcliffe, editors,Automated Deduction - CADE 28 - 28th International Conference on Automated Deduction, Virtual Event, July 12-15, 2021, Proceedings, Lecture Notes in Computer Science, pages 625–635. Springer, 2021
2021
-
[7]
Multiparty session types meet commu- nicating automata
Pierre-Malo Deni´ elou and Nobuko Yoshida. Multiparty session types meet commu- nicating automata. In Helmut Seidl, editor,Programming Languages and Systems - 21st European Symposium on Programming, ESOP 2012, Held as Part of the European Joint Conferences on Theory and Practice of Software, ETAPS 2012, Tallinn, Estonia, March 24 - April 1, 2012. Proceedi...
2012
-
[8]
Victor Dibia, 2025
Victor Dibia.Designing Multi-Agent Systems: Principles, Patterns, and Imple- mentation for AI Agents. Victor Dibia, 2025
2025
-
[9]
Multiparty session nets
Luca Fossati, Raymond Hu, and Nobuko Yoshida. Multiparty session nets. In Matteo Maffei and Emilio Tuosto, editors,Trustworthy Global Computing - 9th International Symposium, TGC 2014, Rome, Italy, September 5-6, 2014. Revised Selected Papers, Lecture Notes in Computer Science, pages 112–127. Springer, 2014
2014
-
[10]
On implementation of global concurrent systems with local asyn- chronous controllers
Blaise Genest. On implementation of global concurrent systems with local asyn- chronous controllers. In Mart´ ın Abadi and Luca de Alfaro, editors,CONCUR 2005 - Concurrency Theory, 16th International Conference, CONCUR 2005, San Francisco, CA, USA, August 23-26, 2005, Proceedings, Lecture Notes in Computer Science, pages 443–457. Springer, 2005
2005
-
[11]
Infinite-state high- level mscs: Model-checking and realizability.J
Blaise Genest, Anca Muscholl, Helmut Seidl, and Marc Zeitoun. Infinite-state high- level mscs: Model-checking and realizability.J. Comput. Syst. Sci., 72(4):617–647, 2006
2006
-
[12]
Realisability and comple- mentability of multiparty session types
Cinzia Di Giusto, ´Etienne Lozes, and Pascal Urso. Realisability and comple- mentability of multiparty session types. In Malgorzata Biernacka, Carlos Olarte, Francesco Ricca, and James Cheney, editors,Proceedings of the 27th International Symposium on Principles and Practice of Declarative Programming, PPDP 2025, Rende, Italy, September 10-11, 2025, pages...
2025
-
[13]
Conditions for synthesis of communicating au- tomata from HMSCs
Lo¨ ıc H´ elou¨ et and Claude Jard. Conditions for synthesis of communicating au- tomata from HMSCs. In A. Rennoch, editor,5th International Workshop on Formal Methods for Industrial Critical Systems (FMICS), pages 203–224, Berlin, Germany, 2000
2000
-
[14]
C. A. R. Hoare.Communicating Sequential Processes. Prentice-Hall, 1985
1985
-
[15]
Language prim- itives and type discipline for structured communication-based programming
Kohei Honda, Vasco Thudichum Vasconcelos, and Makoto Kubo. Language prim- itives and type discipline for structured communication-based programming. In Chris Hankin, editor,Programming Languages and Systems - ESOP’98, 7th Euro- pean Symposium on Programming, Held as Part of the European Joint Conferences on the Theory and Practice of Software, ETAPS’98, L...
1998
-
[16]
Multiparty asynchronous session types.J
Kohei Honda, Nobuko Yoshida, and Marco Carbone. Multiparty asynchronous session types.J. ACM, 63(1):9:1–9:67, 2016
2016
-
[17]
Recommendation Z.120: Message sequence chart (MSC)
ITU-T. Recommendation Z.120: Message sequence chart (MSC). Technical report, International Telecommunication Union, 2011
2011
-
[18]
Langgraph: Building stateful multi-agent applications with llms
LangChain, Inc. Langgraph: Building stateful multi-agent applications with llms. https://github.com/langchain-ai/langgraph, 2024. Accessed: 2026-04-10
2024
-
[19]
Complete multiparty session type projection with automata
Elaine Li, Felix Stutz, Thomas Wies, and Damien Zufferey. Complete multiparty session type projection with automata. In Constantin Enea and Akash Lal, ed- itors,Computer Aided Verification - 35th International Conference, CAV 2023, Paris, France, July 17-22, 2023, Proceedings, Part III, Lecture Notes in Computer Science, pages 350–373. Springer, 2023
2023
-
[20]
Characterizing imple- mentability of global protocols with infinite states and data.Proc
Elaine Li, Felix Stutz, Thomas Wies, and Damien Zufferey. Characterizing imple- mentability of global protocols with infinite states and data.Proc. ACM Program. Lang., 9(OOPSLA1):1434–1463, 2025
2025
-
[21]
Certified implementability of global multiparty proto- cols
Elaine Li and Thomas Wies. Certified implementability of global multiparty proto- cols. In Yannick Forster and Chantal Keller, editors,16th International Conference on Interactive Theorem Proving, ITP 2025, Reykjavik, Iceland, September 28 - Oc- tober 1, 2025, LIPIcs, pages 15:1–15:20. Schloss Dagstuhl - Leibniz-Zentrum f¨ ur Informatik, 2025
2025
-
[22]
Realizability of high-level message sequence charts: closing the gaps.Theor
Markus Lohrey. Realizability of high-level message sequence charts: closing the gaps.Theor. Comput. Sci., 309(1-3):529–554, 2003
2003
-
[23]
A calculus of mobile processes, I and II.Inf
Robin Milner, Joachim Parrow, and David Walker. A calculus of mobile processes, I and II.Inf. Comput., 100(1):1–77, 1992
1992
-
[24]
A trace-based assur- ance framework for agentic AI orchestration: Contracts, testing, and governance, 2026
Ciprian Paduraru, Petru-Liviu Bouruc, and Alin Stefanescu. A trace-based assur- ance framework for agentic AI orchestration: Contracts, testing, and governance, 2026
2026
-
[25]
Asynchronous multiparty session type implementability is decid- able - lessons learned from message sequence charts
Felix Stutz. Asynchronous multiparty session type implementability is decid- able - lessons learned from message sequence charts. In Karim Ali and Guido Salvaneschi, editors,37th European Conference on Object-Oriented Programming, ECOOP 2023, Seattle, Washington, United States, July 17-21, 2023, LIPIcs, pages 32:1–32:31. Schloss Dagstuhl - Leibniz-Zentrum...
2023
-
[26]
AutoGen: Enabling Next-Gen LLM Applications via Multi-Agent Conversation
Qingyun Wu, Gagan Bansal, Jieyu Zhang, Yiran Wu, Shaokun Zhang, Erkang Zhu, Beibin Li, Li Jiang, Xiaoyun Zhang, and Chi Wang. Autogen: Enabling next-gen LLM applications via multi-agent conversation framework.CoRR, abs/2308.08155, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[27]
The Scribble protocol language
Nobuko Yoshida, Raymond Hu, Rumyana Neykova, and Nicholas Ng. The Scribble protocol language. In Mart´ ın Abadi and Alberto Lluch-Lafuente, editors,Trustwor- thy Global Computing - 8th International Symposium, TGC 2013, Buenos Aires, 22 Argentina, August 30-31, 2013, Revised Selected Papers, Lecture Notes in Com- puter Science, pages 22–41. Springer, 2014
2013
-
[28]
Statically verified refinements for multiparty protocols.Proc
Fangyi Zhou, Francisco Ferreira, Raymond Hu, Rumyana Neykova, and Nobuko Yoshida. Statically verified refinements for multiparty protocols.Proc. ACM Pro- gram. Lang., 4(OOPSLA):148:1–148:30, 2020. 23 A Proofs A.1 Proof of Lemma 1 (Concatenation with a Complete Prefix) For the MSC part, considerM 1 = (u A)A complete andM 2 = (v A)A an MSC. Every receive ev...
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.