Recognition: unknown
Gated Coordination for Efficient Multi-Agent Collaboration in Minecraft Game
Pith reviewed 2026-05-10 01:59 UTC · model grok-4.3
The pith
A partitioned private-public state architecture with cost-sensitive gated escalation lets multi-agent teams communicate only when local recovery fails, improving blueprint quality and shortening execution chains in Minecraft tasks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
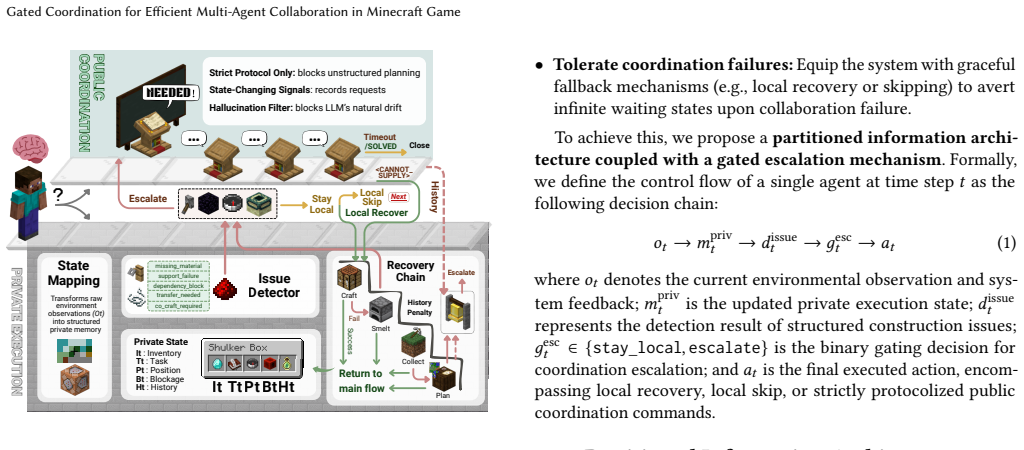
The authors claim that separating private execution states from public coordination states in MLLM agents, together with event-triggered working memory based on system-verified outcomes and a cost-sensitive gated escalation mechanism that initiates cross-region communication only after jointly evaluating node criticality, local recovery cost, and downstream task impact, converts communication into a selective decision rather than a default reaction, producing higher blueprint completion quality and shorter execution chains than baseline models built on strong communication and planned structures.
What carries the argument
The cost-sensitive gated escalation mechanism that decides whether to initiate cross-region communication by weighing node criticality, local recovery cost, and downstream task impact inside a partitioned information architecture that keeps private execution states separate from public coordination states.
If this is right
- Blueprint completion quality rises because agents avoid unnecessary interruptions.
- Overall execution chain length decreases through more local self-recovery.
- Ineffective escalations to public channels drop in number.
- The communications that do occur carry higher utility for the team.
- Local working memory stays compact because it is refreshed only on verified events.
Where Pith is reading between the lines
- The same separation of private and public states could reduce bandwidth use in other long-horizon multi-agent settings such as robotic task planning.
- Agents might develop stronger local recovery routines once they learn that communication is reserved for high-impact cases.
- Scaling to larger teams becomes more feasible if communication volume stays low even as the number of agents grows.
Load-bearing premise
The cost-sensitive gated escalation mechanism can reliably judge when local recovery is insufficient and decide to communicate without introducing new errors or delays.
What would settle it
On the same set of long-term Minecraft construction blueprints, the gated system completing fewer tasks or producing longer execution chains than the strong-communication baseline would show the performance gain does not hold.
Figures





read the original abstract
In long-horizon open-world multi-agent systems, existing methods often treat local anomalies as automatic triggers for communication. This default design introduces coordination noise, interrupts local execution, and overuses public interaction in cases that could be resolved locally. To address this issue, we propose a partitioned information architecture for MLLM agents that explicitly separates private execution states from public coordination states. Building on this design, we introduce two key mechanisms. First, we develop an event-triggered working memory based on system-verified outcomes to maintain compact and low-noise local state representations. Second, we propose a cost-sensitive gated escalation mechanism that determines whether cross-region communication should be initiated by jointly considering node criticality, local recovery cost, and downstream task impact. In this way, communication is transformed from a default reaction into a selective decision. Experiments conducted on long-term construction tasks in open environments demonstrate that, compared to baseline models based on strong communication and planned structures, the introduction of gated communication and a partitioned information architecture results in superior performance in terms of blueprint completion quality and execution chain length. It also improves local self-recovery, reduces ineffective escalations, and increases the utility of public communication.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a partitioned information architecture for MLLM agents in Minecraft that separates private execution states from public coordination states. It adds an event-triggered working memory based on verified outcomes and a cost-sensitive gated escalation mechanism that initiates cross-region communication only after jointly weighing node criticality, local recovery cost, and downstream task impact. The central empirical claim is that these changes yield higher blueprint completion quality, shorter execution chains, better local self-recovery, and fewer ineffective escalations than baselines relying on strong communication and planned structures.
Significance. If the performance gains are confirmed with rigorous quantitative evidence, the selective-communication design could reduce coordination overhead in long-horizon open-world multi-agent systems and generalize to other collaborative settings where default communication is costly.
major comments (2)
- Abstract: the central claim of superior blueprint completion quality and shorter execution chains is stated without any numerical results, baseline specifications, metrics, error bars, or statistical tests, so the empirical contribution cannot be evaluated.
- Description of the cost-sensitive gated escalation mechanism: no quantitative breakdown is supplied of escalation decision accuracy, false-positive or false-negative rates, or added latency, which directly bears on whether the claimed reductions in coordination noise and ineffective escalations actually occur.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We agree that the empirical claims require more explicit quantitative support in the abstract and that the gated escalation mechanism would benefit from isolated performance metrics. We address each major comment below and will incorporate the necessary revisions.
read point-by-point responses
-
Referee: Abstract: the central claim of superior blueprint completion quality and shorter execution chains is stated without any numerical results, baseline specifications, metrics, error bars, or statistical tests, so the empirical contribution cannot be evaluated.
Authors: We agree that the abstract would be strengthened by including concrete numerical results. The experimental section of the manuscript already reports these details, including specific improvements in blueprint completion quality, reductions in execution chain length, the baselines used, and statistical significance. In the revised version we will update the abstract to summarize the key quantitative findings (e.g., percentage gains in completion quality and chain-length reductions) together with the relevant metrics, error bars, and test information. revision: yes
-
Referee: Description of the cost-sensitive gated escalation mechanism: no quantitative breakdown is supplied of escalation decision accuracy, false-positive or false-negative rates, or added latency, which directly bears on whether the claimed reductions in coordination noise and ineffective escalations actually occur.
Authors: This observation is correct; the current manuscript evaluates the overall system rather than providing a component-level breakdown of the gating decisions. We will add a new analysis subsection that reports escalation decision accuracy, false-positive and false-negative rates (computed from logged decisions against ground-truth local resolvability), and the measured latency overhead of the cost-sensitive gate. These additions will directly support the claims regarding reduced coordination noise. revision: yes
Circularity Check
No circularity: empirical proposal with independent experimental validation
full rationale
The paper presents an architectural proposal (partitioned information states, event-triggered memory, cost-sensitive gated escalation) for multi-agent Minecraft collaboration and validates it through comparative experiments on blueprint completion and execution metrics. No equations, fitted parameters, or mathematical derivations appear in the provided text. The central performance claims rest on empirical outcomes rather than any reduction to self-defined quantities or self-citations. The reader's assessment of score 2.0 aligns with the absence of load-bearing self-referential steps; the work is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Qi Chai, Zhang Zheng, Junlong Ren, Deheng Ye, Zichuan Lin, and Hao Wang
- [2]
- [3]
-
[4]
Junzhe Chen, Xuming Hu, Shuodi Liu, Shiyu Huang, Wei-Wei Tu, Zhaofeng He, and Lijie Wen. 2024. Llmarena: Assessing capabilities of large language models in dynamic multi-agent environments. InAnnual Meeting of the Association for Computational Linguistics (ACL). 13055–13077
2024
- [5]
-
[6]
Weize Chen, Yusheng Su, Jingwei Zuo, Cheng Yang, Chenfei Yuan, Chi-Min Chan, Heyang Yu, Yaxi Lu, Yi-Hsin Hung, Chen Qian, et al. 2023. Agentverse: Facilitating multi-agent collaboration and exploring emergent behaviors. In International Conference on Learning Representations (ICLR)
2023
-
[7]
Weize Chen, Jiarui Yuan, Chen Qian, Cheng Yang, Zhiyuan Liu, and Maosong Sun. 2025. Optima: Optimizing effectiveness and efficiency for llm-based multi- agent system. InAnnual Meeting of the Association for Computational Linguistics (ACL). 11534–11557
2025
-
[8]
Yongchao Chen, Jacob Arkin, Yang Zhang, Nicholas Roy, and Chuchu Fan. 2024. Scalable multi-robot collaboration with large language models: Centralized or de- centralized systems?. InIEEE International Conference on Robotics and Automation (ICRA). IEEE, 4311–4317
2024
-
[9]
Yubo Dong, Xukun Zhu, Zhengzhe Pan, Linchao Zhu, and Yi Yang. 2024. Vil- lageragent: A graph-based multi-agent framework for coordinating complex task dependencies in minecraft. InAnnual Meeting of the Association for Computa- tional Linguistics (ACL). 16290–16314
2024
-
[10]
Danny Driess, Fei Xia, Mehdi SM Sajjadi, Corey Lynch, Aakanksha Chowdh- ery, Brian Ichter, Ayzaan Wahid, Jonathan Tompson, Quan Vuong, Tianhe Yu, et al. 2023. Palm-e: An embodied multimodal language model.arXiv preprint arXiv:2303.03378(2023)
work page internal anchor Pith review arXiv 2023
-
[11]
Linxi Fan, Guanzhi Wang, Yunfan Jiang, Ajay Mandlekar, Yuncong Yang, Haoyi Zhu, Andrew Tang, De-An Huang, Yuke Zhu, and Anima Anandkumar. 2022. Minedojo: Building open-ended embodied agents with internet-scale knowledge. Conference on Neural Information Processing Systems (NeurIPS)35 (2022), 18343– 18362
2022
-
[12]
Sirui Hong, Mingchen Zhuge, Jonathan Chen, Xiawu Zheng, Yuheng Cheng, Jinlin Wang, Ceyao Zhang, Zili Wang, Steven Ka Shing Yau, Zijuan Lin, et al
-
[13]
InInternational Conference on Learning Representations (ICLR)
MetaGPT: Meta programming for a multi-agent collaborative framework. InInternational Conference on Learning Representations (ICLR)
-
[14]
Wenlong Huang, Pieter Abbeel, Deepak Pathak, and Igor Mordatch. 2022. Lan- guage models as zero-shot planners: Extracting actionable knowledge for em- bodied agents. InInternational Conference on Machine Learning (ICML). PMLR, 9118–9147
2022
-
[15]
Yuchen Huang, Sijia Li, Wei Liu, Zhiyuan Fan, Yi R Fung, et al. 2025. Scaling Environments for LLM Agents in the Era of Learning from Interaction: A Survey. InConference on Neural Information Processing Systems (NeurIPS)
2025
-
[16]
Guohao Li, Hasan Hammoud, Hani Itani, Dmitrii Khizbullin, and Bernard Ghanem. 2023. Camel: Communicative agents for" mind" exploration of large language model society.Conference on Neural Information Processing Systems (NeurIPS)36 (2023), 51991–52008
2023
- [17]
-
[18]
Shalev Lifshitz, Keiran Paster, Harris Chan, Jimmy Ba, and Sheila McIlraith. 2023. Steve-1: A generative model for text-to-behavior in minecraft.Conference on Neural Information Processing Systems (NeurIPS)36 (2023), 69900–69929
2023
- [19]
-
[20]
Nelson F Liu, Kevin Lin, John Hewitt, Ashwin Paranjape, Michele Bevilacqua, Fabio Petroni, and Percy Liang. 2024. Lost in the middle: How language mod- els use long contexts.The Transactions of the Association for Computational Linguistics (TACL)12 (2024), 157–173
2024
-
[21]
Zhipeng Liu, Xuefeng Bai, Kehai Chen, Xinyang Chen, Xiucheng Li, Yang Xiang, Jin Liu, Hong-Dong Li, Yaowei Wang, Liqiang Nie, et al. 2025. A survey on the feedback mechanism of LLM-based AI agents. InInternational Joint Conference on Artificial Intelligence(IJCAI). 10582–10592
2025
-
[22]
Shrestha Mohanty, Negar Arabzadeh, Andrea Tupini, Yuxuan Sun, Alexey Skryn- nik, Artem Zholus, Marc-Alexandre Côté, and Julia Kiseleva. 2025. Idat: A multi-modal dataset and toolkit for building and evaluating interactive task- solving agents. InProceedings of the 48th International ACM SIGIR Conference on Research and Development in Information Retrieval...
2025
-
[23]
Chen Qian, Wei Liu, Hongzhang Liu, Nuo Chen, Yufan Dang, Jiahao Li, Cheng Yang, Weize Chen, Yusheng Su, Xin Cong, et al. 2024. Chatdev: Communica- tive agents for software development. InAnnual Meeting of the Association for Computational Linguistics (ACL). 15174–15186
2024
-
[24]
Yiran Qin, Enshen Zhou, Qichang Liu, Zhenfei Yin, Lu Sheng, Ruimao Zhang, Yu Qiao, and Jing Shao. 2024. Mp5: A multi-modal open-ended embodied system in minecraft via active perception. InConference on Computer Vision and Pattern Recognition (CVPR). IEEE, 16307–16316
2024
-
[25]
Soharab Hossain Shaikh. 2025. LLM-Based Multi-agent Systems: Frameworks, Evaluation, Open Challenges, and Research Frontiers. InInternational Joint Conference on Computational Intelligence(IJCCI). Springer, 149–170
2025
-
[26]
Chan Hee Song, Jiaman Wu, Clayton Washington, Brian M Sadler, Wei-Lun Chao, and Yu Su. 2023. Llm-planner: Few-shot grounded planning for embodied agents with large language models. InInternational Conference on Computer Vision (ICCV). 2998–3009
2023
-
[27]
Haochen Sun, Shuwen Zhang, Lujie Niu, Lei Ren, Hao Xu, Hao Fu, Fangkun Zhao, Caixia Yuan, and Xiaojie Wang. 2025. Collab-overcooked: Benchmarking and evaluating large language models as collaborative agents. InConference on Empirical Methods in Natural Language Processing (EMNLP). 4922–4951
2025
-
[28]
Guanzhi Wang, Yuqi Xie, Yunfan Jiang, Ajay Mandlekar, Chaowei Xiao, Yuke Zhu, Linxi Fan, and Anima Anandkumar. 2023. Voyager: An open-ended embodied agent with large language models.arXiv preprint arXiv:2305.16291(2023)
work page internal anchor Pith review arXiv 2023
-
[29]
Zihao Wang, Shaofei Cai, Guanzhou Chen, Anji Liu, Xiaojian Ma, and Yitao Liang
- [30]
-
[31]
Zihao Wang, Shaofei Cai, Anji Liu, Yonggang Jin, Jinbing Hou, Bowei Zhang, Haowei Lin, Zhaofeng He, Zilong Zheng, Yaodong Yang, et al. 2024. Jarvis-1: Open-world multi-task agents with memory-augmented multimodal language models.IEEE Transactions on Pattern Analysis and Machine Intelligence (IEEE TPAMI)47, 3 (2024), 1894–1907
2024
-
[32]
Zihao Wang, Shaofei Cai, Zhancun Mu, Haowei Lin, Ceyao Zhang, Xuejie Liu, Qing Li, Anji Liu, Xiaojian Ma, and Yitao Liang. 2024. Omnijarvis: Unified vision-language-action tokenization enables open-world instruction following agents.Conference on Neural Information Processing Systems (NeurIPS)37 (2024), 73278–73308
2024
- [33]
-
[34]
Qingyun Wu, Gagan Bansal, Jieyu Zhang, Yiran Wu, Beibin Li, Erkang Zhu, Li Jiang, Xiaoyun Zhang, Shaokun Zhang, Jiale Liu, et al. 2024. Autogen: Enabling next-gen LLM applications via multi-agent conversations. InFirst conference on language modeling(COLM)
2024
-
[35]
Zhiheng Xi, Jixuan Huang, Chenyang Liao, Baodai Huang, Honglin Guo, Jiaqi Liu, Rui Zheng, Junjie Ye, Jiazheng Zhang, Wenxiang Chen, et al. 2025. Agentgym- rl: Training llm agents for long-horizon decision making through multi-turn reinforcement learning.arXiv preprint arXiv:2509.08755(2025)
-
[36]
Wenchao Xu, Jinyu Chen, Peirong Zheng, Xiaoquan Yi, Tianyi Tian, Wenhui Zhu, Quan Wan, Haozhao Wang, Yunfeng Fan, Qinliang Su, et al. 2025. Deploying foundation model powered agent services: A survey.IEEE Communications Surveys & Tutorials(2025)
2025
-
[37]
Xijian Xu and Jun Wu. 2026. Mitigating LLM Hallucination Snowballing in Multiagent Systems via Context-Aware Semantic Consistency Reasoning.IEEE Transactions on Neural Networks and Learning Systems(TNNLS)(2026)
2026
-
[38]
Shunyu Yao, Jeffrey Zhao, Dian Yu, Nan Du, Izhak Shafran, Karthik R Narasimhan, and Yuan Cao. 2022. React: Synergizing reasoning and acting in language models. InInternational Conference on Learning Representations (ICLR)
2022
- [39]
- [40]
-
[41]
Yanwei Yue, Guibin Zhang, Boyang Liu, Guancheng Wan, Kun Wang, Dawei Cheng, and Yiyan Qi. 2025. Masrouter: Learning to route llms for multi-agent systems. InAnnual Meeting of the Association for Computational Linguistics (ACL). 15549–15572
2025
-
[42]
Wenshuo Zhai, Jinzhi Liao, Ziyang Chen, Bolun Su, and Xiang Zhao. 2025. A survey of task planning with large language models.Intelligent Computing4 (2025), 0124
2025
-
[43]
Ceyao Zhang, Kaijie Yang, Siyi Hu, Zihao Wang, Guanghe Li, Yihang Sun, Cheng Zhang, Zhaowei Zhang, Anji Liu, Song-Chun Zhu, et al. 2024. Proagent: building proactive cooperative agents with large language models. InProceedings of the AAAI Conference on Artificial Intelligence(AAAI), Vol. 38. 17591–17599
2024
- [44]
- [45]
-
[46]
Zhonghan Zhao, Wenhao Chai, Xuan Wang, Boyi Li, Shengyu Hao, Shidong Cao, Tian Ye, and Gaoang Wang. 2024. See and think: Embodied agent in virtual environment. InEuropean Conference on Computer Vision(ECCV). Springer, 187– 204
2024
- [47]
-
[48]
Xizhou Zhu, Yuntao Chen, Hao Tian, Chenxin Tao, Weijie Su, Chenyu Yang, Gao Huang, Bin Li, Lewei Lu, Xiaogang Wang, et al. 2023. Ghost in the minecraft: Generally capable agents for open-world environments via large language models with text-based knowledge and memory.arXiv preprint arXiv:2305.17144(2023)
-
[49]
id", "description
Brianna Zitkovich, Tianhe Yu, Sichun Xu, Peng Xu, Ted Xiao, Fei Xia, Jialin Wu, Paul Wohlhart, Stefan Welker, Ayzaan Wahid, et al. 2023. Rt-2: Vision-language- action models transfer web knowledge to robotic control. InThe Conference on Robot Learning(CoRL). PMLR, 2165–2183. 10 Gated Coordination for Efficient Multi-Agent Collaboration in Minecraft Game A...
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.