Recognition: unknown
Multi-Step Gaussian Process Propagation for Adaptive Path Planning
Pith reviewed 2026-05-10 02:42 UTC · model grok-4.3
The pith
A receding-horizon planner that evaluates Gaussian process posteriors over sequences of future waypoints produces paths that map algal blooms more accurately with equal samples.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
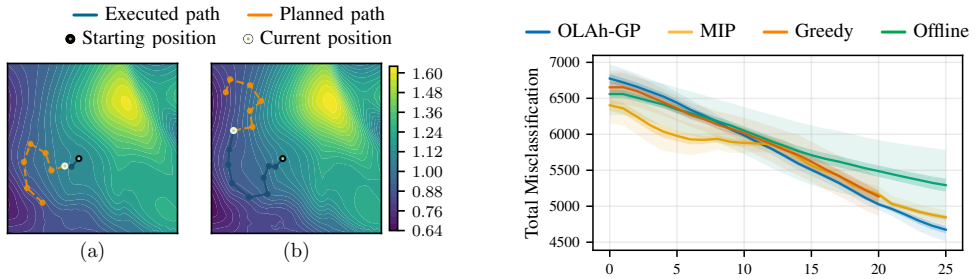
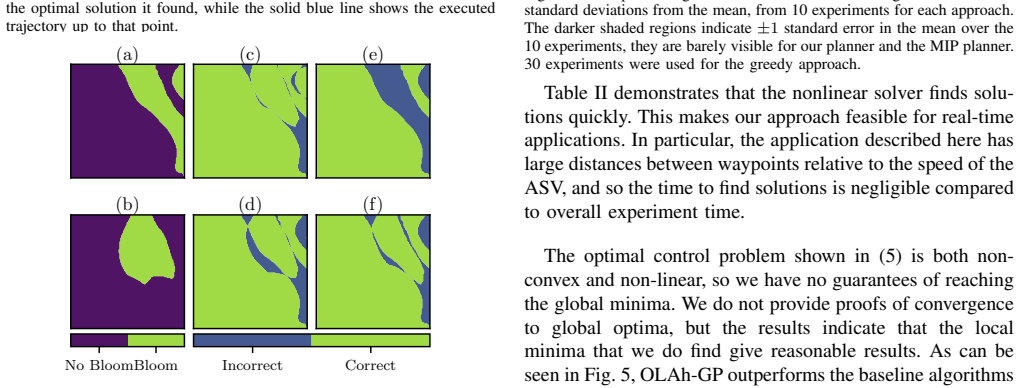
The authors claim that defining path cost as a function of the Gaussian process posterior propagated over future waypoints, then optimizing this cost in a receding-horizon fashion subject to constraints, yields paths that reduce total misclassification probability and binary misclassification rate for algal bloom identification more than existing methods when the number of samples is held fixed. The claim is supported by both high-fidelity simulations and in-situ experiments on chlorophyll a data.
What carries the argument
The multi-step Gaussian process propagation that computes the posterior over a sequence of waypoints to score candidate paths inside the receding-horizon optimizer.
If this is right
- The robot incorporates multi-modal sensing data directly into adaptive path selection.
- State and input constraints are enforced during optimization to produce feasible trajectories.
- With fixed sampling effort the method lowers both total and binary misclassification rates over the domain of interest.
- The approach works on both simulated high-fidelity models and real in-situ oceanic measurements.
Where Pith is reading between the lines
- The same multi-step propagation idea could be tested on other spatial phenomena such as temperature fronts or pollutant plumes to check whether accuracy gains persist.
- If computation of the multi-step posterior can be made faster, the method might support online replanning on platforms with tighter time budgets.
- Coordinating multiple vessels that each run the planner could allow joint coverage of larger areas while still using the same information metric.
Load-bearing premise
The Gaussian process posterior over future waypoints accurately represents the value of information for path selection, and the receding-horizon optimizer finds paths that improve global accuracy without becoming trapped in local minima.
What would settle it
Apply the planner and a baseline method to the same algal-bloom dataset with identical sample budgets and measure whether total misclassification probability remains higher or equal for the new method.
Figures




read the original abstract
Efficient and robust path planning hinges on combining all accessible information sources. In particular, the task of path planning for robotic environmental exploration and monitoring depends highly on the current belief of the world. To capture the uncertainty in the belief, we present a Gaussian process based path planning method that adapts to multi-modal environmental sensing data and incorporates state and input constraints. To solve the path planning problem, we optimize over future waypoints in a receding horizon fashion, and our cost is thus a function of the Gaussian process posterior over all these waypoints. We demonstrate this method, dubbed OLAhGP, on an autonomous surface vessel using oceanic algal bloom data from both a high-fidelity model and in-situ sensing data in a monitoring scenario. Our simulated and experimental results demonstrate significant improvement over existing methods. With the same number of samples, our method generates more informative paths and achieves greater accuracy in identifying algal blooms in chlorophyll a rich waters, measured with respect to total misclassification probability and binary misclassification rate over the domain of interest.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes OLAhGP, a Gaussian process-based adaptive path planning method for robotic environmental monitoring. It propagates the GP posterior over multiple future waypoints and optimizes a cost derived from this posterior in a receding-horizon framework while respecting state and input constraints. The approach is evaluated on an autonomous surface vessel for algal bloom identification using chlorophyll-a data from both high-fidelity simulations and in-situ experiments, claiming that the method produces more informative paths than baselines and achieves lower total misclassification probability and binary misclassification rate over the domain with the same number of samples.
Significance. If the reported accuracy gains hold under rigorous validation, the work would contribute to uncertainty-aware path planning for field robotics by showing how multi-step GP propagation can guide sampling in multi-modal environments. The combination of simulation and real-world ASV experiments provides practical grounding, and the focus on misclassification metrics directly ties planning to the downstream monitoring task.
major comments (2)
- [Method section (optimization formulation)] The central claim rests on the receding-horizon optimizer reliably locating waypoint sequences whose information gain improves global GP accuracy. However, the manuscript provides no description of the numerical solver, initialization procedure, or multi-start statistics to address non-convexity of the mutual-information objective over waypoint sequences. This omission is load-bearing because local minima could produce paths that do not outperform baselines in misclassification rate.
- [§5] §5 (Results): The simulated and experimental improvements in total misclassification probability and binary misclassification rate are reported without error bars, standard deviations across repeated trials, or formal statistical tests against the baselines. Without these, it is impossible to assess whether the observed gains exceed variability arising from GP hyperparameter fitting or optimizer stochasticity.
minor comments (2)
- [Abstract] The acronym OLAhGP is used in the abstract and title without an explicit expansion on first use.
- [Method section] Notation for the multi-step GP posterior propagation could be clarified with an explicit recursive definition or diagram to distinguish it from standard single-step GP regression.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [Method section (optimization formulation)] The central claim rests on the receding-horizon optimizer reliably locating waypoint sequences whose information gain improves global GP accuracy. However, the manuscript provides no description of the numerical solver, initialization procedure, or multi-start statistics to address non-convexity of the mutual-information objective over waypoint sequences. This omission is load-bearing because local minima could produce paths that do not outperform baselines in misclassification rate.
Authors: We agree that additional details on the optimization procedure are required to support the reliability of the reported results. In the revised manuscript we will expand the method section to specify the numerical solver and its configuration, describe the initialization strategy (warm-start from the prior receding-horizon solution with small random perturbations), and report performance statistics obtained from multiple random initializations. These additions will demonstrate that the observed improvements are robust to local minima. revision: yes
-
Referee: [§5] §5 (Results): The simulated and experimental improvements in total misclassification probability and binary misclassification rate are reported without error bars, standard deviations across repeated trials, or formal statistical tests against the baselines. Without these, it is impossible to assess whether the observed gains exceed variability arising from GP hyperparameter fitting or optimizer stochasticity.
Authors: We acknowledge the importance of statistical rigor. For the simulation experiments we will conduct additional runs with varied random seeds for both GP hyperparameter fitting and optimization, then report means, standard deviations, and results of formal statistical tests (e.g., paired Wilcoxon tests) against the baselines. For the in-situ ASV experiments, exact repetition of field conditions is inherently limited; we will therefore report the variability observed across the missions that were performed and discuss the practical constraints while still presenting the consistent gains relative to baselines. revision: partial
Circularity Check
No significant circularity; derivation relies on standard GP regression and receding-horizon optimization
full rationale
The paper's core derivation uses a Gaussian process posterior over future waypoints as the basis for a receding-horizon cost function, then selects paths via optimization. This is a standard construction in GP-based active learning and does not reduce the claimed empirical gains (lower total misclassification probability and binary misclassification rate versus baselines with equal samples) to a quantity defined by the method itself. No self-definitional loops, fitted inputs renamed as predictions, or load-bearing self-citations appear in the abstract or described chain; the performance comparison is external to the optimization objective and relies on simulation/experimental data from algal bloom models. The approach is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- Gaussian process hyperparameters
axioms (2)
- domain assumption The environmental field of interest can be represented by a Gaussian process whose posterior quantifies information gain for path planning
- domain assumption Receding-horizon optimization over a finite number of waypoints approximates the globally informative path
Reference graph
Works this paper leans on
-
[1]
Hierarchical rough terrain motion planning using an optimal sampling-based method,
M. Brunner, B. Bruggemann, and D. Schulz, “Hierarchical rough terrain motion planning using an optimal sampling-based method,” inIEEE ICRA, 2013, pp. 5539–5544
2013
-
[2]
Solving constrained trajectory planning problems using biased particle swarm optimization,
R. Chai, A. Tsourdos, A. Savvaris, S. Chai, and Y . Xia, “Solving constrained trajectory planning problems using biased particle swarm optimization,”IEEE Trans. on Aerospace and Electronic Systems, vol. 57, no. 3, pp. 1685–1701, 2021. [Online]. Available: https://ieeexplore.ieee.org/document/9319162/
-
[3]
Path planning for manipulators based on an improved probabilistic roadmap method,
G. Chen, N. Luo, D. Liu, Z. Zhao, and C. Liang, “Path planning for manipulators based on an improved probabilistic roadmap method,” Robotics and Computer-Integrated Manufacturing, vol. 72, p. 102196, 2021
2021
-
[4]
Planning and acting in partially observable stochastic domains,
L. P. Kaelbling, M. L. Littman, and A. R. Cassandra, “Planning and acting in partially observable stochastic domains,”Artificial Intelli- gence, vol. 101, no. 1, pp. 99–134, 1998
1998
-
[5]
Nonmyopic informative path planning based on global kriging variance minimization,
C. Xiao and J. Wachs, “Nonmyopic informative path planning based on global kriging variance minimization,”IEEE Robotics and Automa- tion Letters, vol. 7, no. 2, pp. 1768–1775, 2022
2022
-
[6]
Informative path planning for an autonomous underwater vehicle,
J. Binney, A. Krause, and G. S. Sukhatme, “Informative path planning for an autonomous underwater vehicle,” inIEEE ICRA, 2010, pp. 4791–4796
2010
-
[7]
Informative path planning for active regression with gaussian processes via sparse optimization,
S. Dutta, N. Wilde, and S. L. Smith, “Informative path planning for active regression with gaussian processes via sparse optimization,” IEEE Transactions on Robotics, vol. 41, pp. 2184–2199, 2025
2025
-
[8]
Bayesian optimisation for informative continuous path planning,
R. Marchant and F. Ramos, “Bayesian optimisation for informative continuous path planning,” inIEEE ICRA, 2014, pp. 6136–6143
2014
-
[9]
Gaussian process motion planning,
M. Mukadam, X. Yan, and B. Boots, “Gaussian process motion planning,” inIEEE ICRA, 2016, pp. 9–15
2016
-
[10]
Gaussian processes for data-efficient learning in robotics and control,
M. P. Deisenroth, D. Fox, and C. E. Rasmussen, “Gaussian processes for data-efficient learning in robotics and control,”IEEE Trans. Pattern Anal. Mach. Intell., vol. 37, no. 2, pp. 408–423, 2015
2015
-
[11]
Data-driven selective sampling for marine vehicles using multi-scale paths,
S. Manjanna and G. Dudek, “Data-driven selective sampling for marine vehicles using multi-scale paths,” inIEEE/RSJ IROS, 2017, pp. 6111–6117
2017
-
[12]
Sensor planning for a symbiotic UA V and UGV system for precision agriculture,
P. Tokekar, J. V . Hook, D. Mulla, and V . Isler, “Sensor planning for a symbiotic UA V and UGV system for precision agriculture,” vol. 32, no. 6, pp. 1498–1511, 2016-12
2016
-
[13]
Approximate sequential optimization for informative path planning,
J. Ott, M. J. Kochenderfer, and S. Boyd, “Approximate sequential optimization for informative path planning,”Robotics and Autonomous Systems, vol. 182, p. 104814, 2024
2024
-
[14]
Heterogeneous multi-robot system for exploration and strategic water sampling,
S. Manjanna, A. Q. Li, R. N. Smith, I. Rekleitis, and G. Dudek, “Heterogeneous multi-robot system for exploration and strategic water sampling,” inIEEE ICRA, 2018, pp. 4873–4880
2018
-
[15]
Adaptive underwater robotic sampling of dispersal dynamics in the coastal ocean,
G. E. Berget, J. Eidsvik, M. O. Alver, F. Py, E. I. Grøtli, and T. A. Johansen, “Adaptive underwater robotic sampling of dispersal dynamics in the coastal ocean,” inRobotics Research, T. Asfour, E. Yoshida, J. Park, H. Christensen, and O. Khatib, Eds. Springer International Publishing, 2022, vol. 20, pp. 610–625
2022
-
[16]
Long-horizon informative path planning with obstacles and time constraints,
Y . Ge, A. J. H. Olaisen, J. Eidsvik, R. P. Jain, and T. A. Johansen, “Long-horizon informative path planning with obstacles and time constraints,”IFAC-PapersOnLine, vol. 55, no. 31, pp. 124–129, 2022
2022
-
[17]
Using an autonomous underwater vehicle with onboard stochastic advection-diffusion models to map excursion sets of environmental variables,
K. H. Foss, G. E. Berget, and J. Eidsvik, “Using an autonomous underwater vehicle with onboard stochastic advection-diffusion models to map excursion sets of environmental variables,”Environmetrics, vol. 33, no. 1, p. e2702, 2022
2022
-
[18]
J. Swindell, M. Popovi ´c, and R. Polvara. (2026) Active informative planning for uav-based weed mapping using discrete gaussian process representations. ArXiv:2601.13196. [Online]. Avaiable: https://arxiv.org/abs/2601.13196. [Online]. Available: https://arxiv.org/abs/2601.13196
-
[19]
Efficient multiob- jective optimization employing Gaussian processes, spectral sampling and a genetic algorithm,
E. Bradford, A. M. Schweidtmann, and A. Lapkin, “Efficient multiob- jective optimization employing Gaussian processes, spectral sampling and a genetic algorithm,”Journal of Global Optimization, vol. 71, no. 2, pp. 407–438, 2018
2018
-
[20]
Near-optimal sensor placements in gaussian processes,
C. Guestrin, A. Krause, and A. P. Singh, “Near-optimal sensor placements in gaussian processes,” inICML, 2005, pp. 265–272
2005
-
[21]
Efficient implementation of Gaussian process–based predictive control by quadratic programming,
P. Polcz, T. P ´eni, and R. T ´oth, “Efficient implementation of Gaussian process–based predictive control by quadratic programming,”IET Control Theory & Applications, vol. 17, no. 8, pp. 968–984, 2023
2023
-
[22]
Online learning-based model predictive control with Gaussian process models and stability guarantees,
M. Maiworm, D. Limon, and R. Findeisen, “Online learning-based model predictive control with Gaussian process models and stability guarantees,”International Journal of Robust and Nonlinear Control, vol. 31, no. 18, pp. 8785–8812, 2021
2021
-
[23]
Campaign for hyperspectral data validation in north atlantic coastal waters,
A. E. Oudijket al., “Campaign for hyperspectral data validation in north atlantic coastal waters,” inIEEE WHISPERS, 2022, pp. 1–5
2022
-
[24]
Moni- toring the growth of coastal algae blooms in harsh weather conditions using a wave-propelled ASV: Challenges and lessons learned,
H. Øveraas, A. Dallolio, P. D. L. Torre, and T. A. Johansen, “Moni- toring the growth of coastal algae blooms in harsh weather conditions using a wave-propelled ASV: Challenges and lessons learned,”Field Robotics, vol. 3, pp. 392–412, 2023
2023
-
[25]
Operational closed-loop system for multi- scale chlorophyll-a monitoring along the Norwegian coast,
D. O. Halvorsenet al., “Operational closed-loop system for multi- scale chlorophyll-a monitoring along the Norwegian coast,”Frontiers in Marine Science, vol. 13, p. 1688255, 2026
2026
-
[26]
Adaptive modeling, adaptive data assimilation and adaptive sampling,
P. F. J. Lermusiaux, “Adaptive modeling, adaptive data assimilation and adaptive sampling,”Physica D: Nonlinear Phenomena, vol. 230, no. 1, pp. 172–196, 2007
2007
-
[27]
Toward adaptive robotic sampling of phytoplank- ton in the coastal ocean,
T. O. Fossumet al., “Toward adaptive robotic sampling of phytoplank- ton in the coastal ocean,”Science Robotics, vol. 4, no. 27, p. eaav3041, 2019
2019
-
[28]
C. E. Rasmussen and C. K. I. Williams,Gaussian Processes for Machine Learning, 3rd ed., ser. Adaptive computation and machine learning. MIT Press, 2008
2008
-
[29]
A more efficient rank-one covariance matrix update for evolution strategies,
O. Krause and C. Igel, “A more efficient rank-one covariance matrix update for evolution strategies,” inACM Conf. on Foundations of Genetic Algorithms XIII, 2015, pp. 129–136
2015
-
[30]
A Bayesian Committee Machine,
V . Tresp, “A Bayesian Committee Machine,”Neural Computation, vol. 12, no. 11, pp. 2719–2741, 2000
2000
-
[31]
Variational learning of inducing variables in sparse gaussian processes,
M. Titsias, “Variational learning of inducing variables in sparse gaussian processes,” vol. 5, pp. 567–574
-
[32]
Distributed gaussian processes,
M. Deisenroth and J. W. Ng, “Distributed gaussian processes,” in ICML, vol. 37, 2015, pp. 1481–1490
2015
-
[33]
MonitoringKarenia brevisblooms in the Gulf of Mexico using satellite ocean color imagery and other data,
R. P. Stumpfet al., “MonitoringKarenia brevisblooms in the Gulf of Mexico using satellite ocean color imagery and other data,”Harmful Algae, vol. 2, no. 2, pp. 147–160, 2003
2003
-
[34]
Modeling the ecosystem dynamics of the Barents sea including the marginal ice zone: I. Physical and chemical oceanography,
D. Slagstad and T. A. McClimans, “Modeling the ecosystem dynamics of the Barents sea including the marginal ice zone: I. Physical and chemical oceanography,”Journal of Marine Systems, vol. 58, no. 1, pp. 1–18, Oct. 2005
2005
-
[35]
Modelling the ecosystem dynamics of the Barents Sea including the marginal ice zone: II. Carbon flux and interannual variability,
P. Wassmann, D. Slagstad, C. W. Riser, and M. Reigstad, “Modelling the ecosystem dynamics of the Barents Sea including the marginal ice zone: II. Carbon flux and interannual variability,”Journal of Marine Systems, vol. 59, no. 1, pp. 1–24, 2006
2006
-
[36]
ACRI (France), “Global Ocean Colour (Copernicus-GlobColour), Bio- Geo-Chemical, L4 (monthly and interpolated) from Satellite Observa- tions (Near Real Time),” 2025, doi:10.48670/moi-00279
-
[37]
J. A. E. Andersson, J. Gillis, G. Horn, J. B. Rawlings, and M. Diehl, “CasADi: a software framework for nonlinear optimization and optimal control,”Mathematical Programming Computation, vol. 11, no. 1, pp. 1–36, 2019. [Online]. Available: http://link.springer.com/10.1007/s12532-018-0139-4
-
[38]
On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming,
A. W ¨achter and L. T. Biegler, “On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming,”Mathematical Programming, vol. 106, no. 1, pp. 25–57, 2006. [Online]. Available: http://link.springer.com/10.1007/ s10107-004-0559-y
2006
-
[39]
The LSTS toolchain for networked vehicle systems,
J. Pinto, P. S. Dias, R. Martins, J. Fortuna, E. Marques, and J. Sousa, “The LSTS toolchain for networked vehicle systems,” inOCEANS- Bergen, IEEE, 2013, pp. 1–9
2013
-
[40]
Design and validation of a course control system for a wave-propelled unmanned surface vehicle,
A. Dallolio, H. Øveraas, J. A. Alfredsen, T. I. Fossen, and T. A. Johansen, “Design and validation of a course control system for a wave-propelled unmanned surface vehicle,”Field Robotics, vol. 2, pp. 748–773, 2022
2022
-
[41]
Interoperable and modular system architecture for green-energy unmanned surface vehicles in ocean science,
A. Dallolioet al., “Interoperable and modular system architecture for green-energy unmanned surface vehicles in ocean science,” in IEEE/MTS Oceans, Brest, 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.